Аннотация
Рассмотрено построение системы, обеспечивающей повышение точности токарной обработки, с использованием искусственных нейронных сетей в самообучающихся станках с адаптивным управлением, формирующих скорректированную траекторию движения подачи резца в процессе резания с учетом геометрической неточности станка, изменения жесткостной характеристики станка по длине обработки, его времени работы и износа инструмента. Проведен анализ систем нейроуправления с корректирующим воздействием на приводы подач токарного станка.
Интерес к искусственным нейронным сетям вырос за последние несколько лет. Это было вызвано как теоретическими, так и прикладными достижениями в области управления сложными процессами. Искусственные нейронные сети могут менять свое поведение в зависимости от внешней среды. Этот фактор в большей степени, чем любой другой, ответствен за тот интерес, который они вызывают. После предъявления входных сигналов они самонастраиваются, чтобы обеспечивать требуемую реакцию на изменение входных параметров.
Повышение эффективности токарной обработки путём использования нейронных сетей достигается путём решения следующих задач:
- Анализа существующих нейронных структур управления и прогнозирования для управления токарной обработкой и нейроалгоритмов программного обеспечения.
- Разработки структур и синтеза нейрорегуляторов для управления токарной обработкой.
- Разработки принципов нейроадаптивного управления с математическим, алгоритмическим и программным обеспечением и экспериментальной проверкой на научно–исследовательском стенде.
В процессе исследований и отработки алгоритмов нейроуправления широко использовалась: нейроматематика; теория нейронных сетей; методы цифрового моделирования в средах Matlab–Simulink, а так же данные экспериментальной обработки партии заготовок типа пруток на станке 16К20Ф3, проведённой в МГТУ СТАНКИН.
На вход искусственного нейрона поступает некоторое множество сигналов, каждый из которых является выходом другого нейрона. Каждый вход умножается на соответствующий вес, аналогичный синаптической силе, и все произведения суммируются, определяя уровень активации нейрона. На рис. 1. представлена модель, реализующая эту идею. Здесь множество входных сигналов, обозначенных x1, x2,…, x7, поступает на искусственный нейрон. Каждый сигнал умножается на соответствующий вес w1, w2,…, wn, и поступает на суммирующий блок, обозначенный ∑. Каждый вес соответствует «силе» одной биологической синаптической связи. Суммирующий блок, соответствующий телу биологического элемента, складывает взвешенные входы алгебраически, создавая выход, который мы будем называть NET. В векторных обозначениях это может быть компактно записано следующим образом: NET = XW
Сеть обучается, чтобы для некоторого множества входов давать желаемое множество выходов. Каждое такое входное (или выходное) множество рассматривается как вектор (рис. 2). Обучение осуществляется путем последовательного предъявления входных векторов с одновременной подстройкой весов в соответствии с определенной процедурой. Получая данные и отслеживая их нейронная сеть, основываясь на предыдущих опытах, будет самостоятельно принимать решение о необходимости размерной и кинематической поднастройки станка и производить необходимые коррекции управляющих программ для станков с ЧПУ.
В разработанной методике построения системы адаптивного оптимального управления на базе искусственных нейронных сетей и их обучения была использована нейроматематика, теория нейронных сетей, методы цифрового моделирования в средах Matlab&Simulink. Предложена система адаптивного оптимального управления для системы ЧПУ типа PCNC в виде подключаемого программного компонента, работающая по следующему алгоритму.
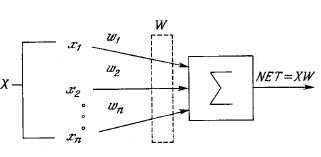
Рисунок 1 – Искусственный нейрон
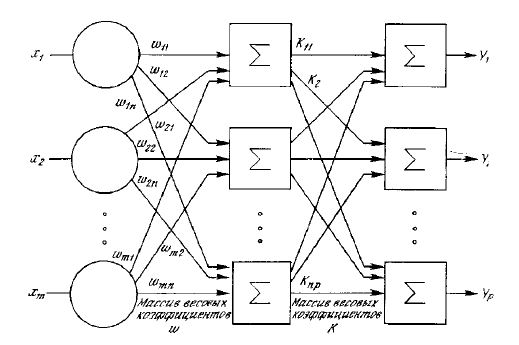
Рисунок 2 – Двухслойная нейронная сеть
На вход искусственного нейрона поступает некоторое множество сигналов, каждый из которых является выходом другого нейрона. Каждый вход умножается на соответствующий вес, аналогичный синаптической силе, и все произведения суммируются, определяя уровень активации нейрона.Для оценки числа нейронов в многослойной сети можно воспользоваться формулой (1):
где n – размерность входного сигнала, m – размерность выходного сигнала, N – число обучающей выборки, Lw – необходимое число синаптических весов.
Оценив необходимое число весов, можно рассчитать число нейронов в скрытых слоях для двухслойной сети по формуле (2):
Изменение параметров обработки отслеживает система нейроидентификации, далее эти параметры сравниваются с желаемыми параметрами эталонной модели, вырабатывается сигнал переобучения. Такое управление в токарном станке является оптимальным, обеспечивающим самонастройку при изменении параметров исполнительных механизмов.
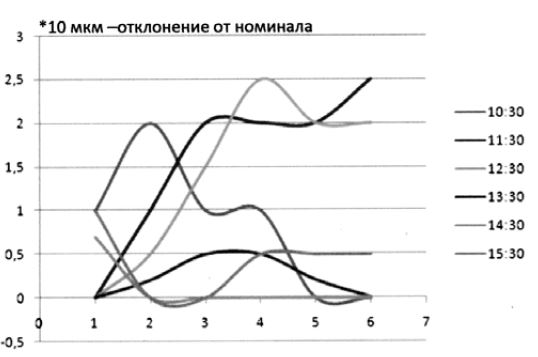
Рисунок 3 – Результаты моделирования отклонения
На рис. 3 показано отклонение номинального размера в сечениях детали в зависимости от времени обработки проведенное с нейромоделированием. Таким образом имеется возможность корректировать управляющую программу, изменяя траекторию движений режущего инструмента. Тем самым доказана практическая значимость возможности применения данных нейронных сетей в системах управления УЧПУ станков.
Таким образом, имеются все предпосылки для того, чтобы говорить о возможности использования нейронных сетей в машиностроении, и, в частности, для моделирования и корректировки процессов при токарной обработке на станках с ЧПУ. В данной работе представлены результаты опытных исследований, которые показали высокую практическую эффективность возможности нейросетевого регулирования токарной обработки.
Список литературы
1. Брюханов В.Н., Схиртладзе А.Г., Вороненко В.П. Автоматизация машиностроительного производства. – МГТУ СТАНКИН. – М.: 2002. – 288 с.
2. Буянкин В.М., Васильев В.В., Тихомиров Э.Л., Точилина Н.С.
Управление приводом в микропроцессорных системах. Сб. научных трудов. – М.: ЭНИМС, 1983. – С. 43–51.
3. Буянкин В.М. Интегральный, пропорциональный, дифференциальный нейрорегулятор. «Вестник МГТУ им. Н.Э.Баумана», серия фундаментальные науки 2006 r.N3(64).