Описание: В данной статье обоснован выбор типа первичного преобразователя для системы виброконтроля состояния вентилятора главного проветривания угольной шахты. Произведено моделирование выбранного пьезоэлектрического преобразователя.
Параметр контроля должен определяться свойствами конкретной вибрации и обеспечивать измерение интересующих составляющих вибрации с достаточной точностью. Выбор в качестве такого параметра амплитуды виброперемещения позволяет точнее измерять низкочастотные составляющие, на которые приходится основная часть энергии спектра вибрации шахтных вентиляторов главного проветривания.
Внедрение непрерывного контроля вибрации позволит повысить надежность и долговечность работы вентиляторов за счет своевременного обнаружения дефектов и предупреждения разрушения узлов машин. Кроме того, дальнейшее развитие систем контроля вибрации предполагает введение элементов вибродиагностики – по изменению параметров вибрации устанавливать возникновение какой-либо неисправности.
При измерении параметров вибрации широко используют пьезоэлектрические, индукционные, индуктивные и емкостные вибропреобразователи.
Вибродатчики можно разделить на генераторные и параметрические. В отдельную группу можно отнести сравнительно недавно появились, лазерные вибродатчики. Параметрические, в свою очередь, делятся на индуктивные и емкостные.
К генераторным датчикам относятся пьезоэлектрические. Это наиболее распространенные на сегодняшний день датчики.
Наиболее оптимальные показатели имеют пьезоэлектрические акселерометры. Акселерометрами называются приборы, предназначенные для измерения ускорения. Пьезоэлектрические преобразователи ускорения являются активными преобразователями, то есть создают измерительное напряжение без подачи на них напряжения от постороннего источника.
К их недостаткам можно отнести:
- невозможность проведения бесконтактных измерений;
- невозможность измерения постоянной составляющей вибрации.
Достоинства генераторных датчиков по сравнению с параметрическими вибродатчиками: нет необходимости в дополнительном источнике питания, отсутствие первоначальной установки зазора, более простая схема, отсутствие шумов при малых уровнях сигнала. Пьезоэлектрический преобразователь ускорения состоит из корпуса 6 с резьбовым отверстием 7 для крепления на механизме (рис.1), электрического вывода 4, демпфирования 3, пружины 5, сейсмической массы 1 и пьезоэлектрического элемента 2. Пьезоэлектрические датчики ускорения являются абсолютными вибропреобразователи.
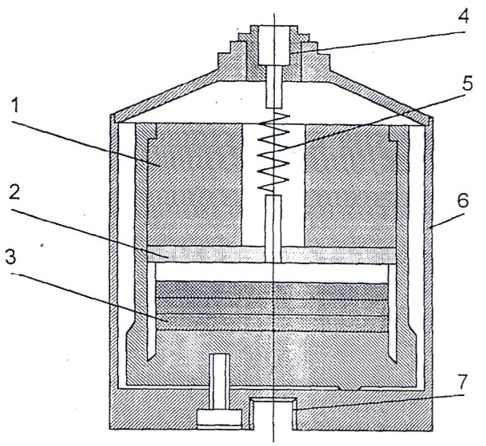
Рисунок 1 - Пьезоэлектрический преобразователь ускорения
Согласно второму закону Ньютона для того, чтобы привести массу в движение нужна сила формула (1):

В пьезоэлектрических датчиках ускорения движущая сила передается от объекта на встроенную в датчик сейсмическую систему, состоящую из сейсмической массы, пружины и демпфера. Сейсмическая система, в свою очередь, создает соответствующую силу, которая действует на пьезоэлектрический чувствительный элемент, на поверхности которого создается электрический заряд, следовательно, электрическое напряжение, пропорционально ускорению. Для дальнейшей обработки этого напряжения нужны усилители с исключительно большим входным сопротивлением.
Для получения как можно более широкого диапазона рабочих частот преобразователя ускорения его характеристическая частота должна быть по возможности высокой (масса небольшой, пружина очень жесткой).
Демпфирование используется для снижения коэффициента преобразования на резонансной частоте, при этом оптимальное демпфирование D=0.65. Диапазон рабочих частот оптимально демпфированных систем находится в пределах от 0 до 60% от характеристической частоты преобразователя. На сейсмическую массу m действуют силы;
- инерции
где x – перемещение массы относительно корпуса прибора; y – перемещение корпуса относительно инерционного пространства;
– демпфирование
где D - коэффициент демпфирования;
– упругая

Где с – коэффициент упругости.
Сумма этих сил равна

Или


Передаточная функция акселерометра имеет вид:
Динамические погрешности акселерометров определяются относительнымкоэффициентом затухания d и соотношением между собственной частотой w0 и частотой ускорения w.

Все остальные характеристики приводятся для оценки погрешностей. Для продольного возбуждения электрическое напряжение холостого хода определяется по формуле:

где F(t) – сила, действующая на датчик; А – площадь электрода; d – толщина электрода; g – пьезоэлектрическая постоянная давления.
На рисунке 2 представлена схема замещения пьезоэлектрического преобразователя ускорения, построена с учетом внутренней емкости датчика Си и емкости кабеля Ск.
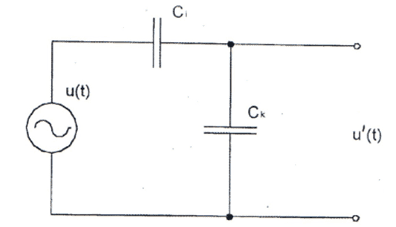
Рисунок 2 – Схема замещения пьезоэлектрического преобразователя ускорения
Пьезоэлектрические датчики ускорения имеют характеристику передачи, которая характерна для фильтра низких частот с резонансом. Нижняя граничная частота таких преобразователей зависит от различных влияющих величин, причем решающее влияние на режим их работы на низких частотах обнаруживают конструкция преобразователя, усилитель, применяется и качество монтажа, а также рабочие температуры.
На рисунке 3 представлена принципиальная частотная зависимость относительного коэффициента передачи напряжения пьезоэлектрического датчика ускорения.
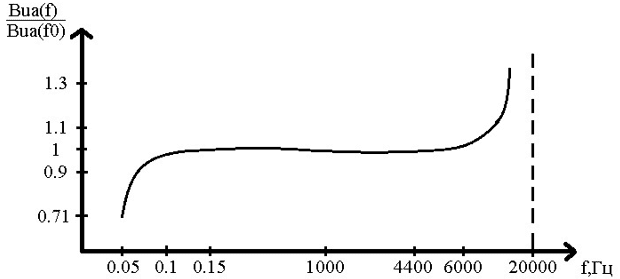
Рисунок 3 – Частотная зависимость относительного коэффициента передачи напряжения пьезоэлектрического датчика