
Vortrag
Der Inhalt
- Einführung
- 1. Funktionsschema des DHCP–Systems
- 2. Zusammensetzung und Funktionsprinzip des Druckerhöhungssystems
- 3. Rückblick und Untersuchung bekannter Lösungen zum Thema Kontrollsysteme und Kontrolle der Wasserdruckerhöhung
- 4. Begründung der Entscheidungsrichtung des Problems
- Schlussfolgerungen
- Literaturhinweis
Einfuhrung
Etwa 60% der Stromkosten in Industrie und Kommunalwirtschaft entfallen auf Elektromotoren. Gleichzeitig entfällt der größte Teil dieses Energieverbrauchs auf die Antriebssysteme von Ventilatoren, Kompressoren, Pumpen und anderen Anlagen mit zyklischer Lastbetrieb.
Der Elektroantrieb ist die Energiebasis moderner Produktion und Elektroantriebe mit asynchronen Kurzschlussmotoren gehen vor industriellen elektrischen Antrieben. Diese elektrischen Antriebe fanden breite Anwendung in verschiedenen Mechanismen wegen ihrer Einfachheit und relativ geringen Kosten. Ihre Nachteile sind allgemein bekannt. Ein Schweranlauf bei dem Netzdirektanschluß, der von 6–7 mehrfachen Strömen begleitet wird und als Folge — geringe Betriebsbewährung, Schwierigkeit der Geschwindigkeitssteuerung.
Ein typisches Beispiel für die Verwendung von Asynchronmotoren sind Pumpstationen mit der Kalt- und Heisswasserversorgung ist Abwasserpumpstationen und Heizungsanlagen. Dieser Typ von Maschinen verbraucht mindestens 20 bis 25% des gesamten anfallenden Stroms.
Meistens Fällen sind die Elektroantriebe dieser Mechanismen nicht geregelt. Dies erlaubt keinen rationalen Energieverbrauch bei der Abwechslung der technologischen Anforderungen in einem weiten Bereich. Diese Mechanismen sind auf der Grundlage maximaler Leistung ausgewählt und arbeiten meistens mit geringerer Produktivität, das durch die Änderung der Nachfrage in verschiedenen Zeiträumen bestimmt wird.
1. Funktionsschema des DHCP–Systems
Die Druckerhöhungspumpstation ist ein System, das den Druck während der Wasserversorgung erhöht und aus folgenden Bauelementen besteht: Drucksensor am Systemauslaß; Pumpen; Behälter; Schieber. (Abb. 1)
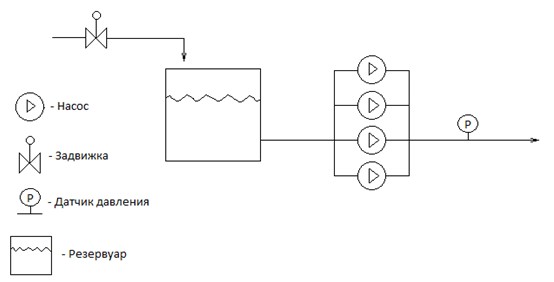
Abbildung 1 – Funktionsschema des manuellen Druckerhöhungspumpstation
Das wasser fließt durch die Rohrleitung zum Tank. Wenn der Tank voll ist, wird das Wasser vom Ventil blockiert. Aus dem Behälter fließt Wasser in die Pumpen, die ein– und ausgeschaltet werden, wenn der Wasserdruck am Auslass nicht ausreicht oder überzählig ist. Die Menschen bemessen, schalten Pumpen ein und aus und schließen das Wasser ab.
2. Zusammensetzung und Funktionsprinzip des Druckerhohungssystems
Die Booster/Booster–Pumpstation (DHPS) dient zum Pumpen und Erhöhen des Drucks von sauberem Wasser in der Wasserversorgung. Die Anlage dieser Einrichtung versorgt eine Lösung für die Aufgaben von Wirtschaft und Haushalt und Löschwasserversorgung nicht nur für ein oder mehrere Industrie–, Verwaltungs– oder Wohngebäude (einschließlich Hochhäuser), aber auch ganze Siedlungen und Unternehmen.
Die Verwendung von DHPS ist in der Wasserversorgung erlaubt:
- Wohnhäuser;
- Bildungseinrichtungen;
- Industriesystem;
- Gesundheitseinrichtungen;
- Hotels usw.
Pumpen Pumpstationen ohne Tanks sind kompakter (Abb. 2). Sie werden oft in kleinen Einbauten untergebracht. Die Arbeitsweise solcher Stationen ist eng mit dem Wasserverbrauchsmodus verbunden. Solche Stationen werden in den Brunnenanlagen gebaut. Die Wasserleitungen und Wassernetze sind möglich nur beim ausreichendem Ausdruck im Stadtwasserleitungsnetz.

Abbildung 2 – Gesamtansicht der Druckerhöhungspumpstation ohne Tank:
1) Beobachtungsraum;
2) Pumpanlage;
3) Rohrleitungen mit Absperr– und Regelbeschlag;
4) Steuerschrank;
5) Lastaufzug;
6) Lampen;
7) Heizanlagen;
8) Belüftungssystem.
Der Preis einer solchen Station hängt von ihrer Konfiguration ab:
- die Anzahl der Pumpen und ihre Leistungsmerkmale;
- Automatisierungsoption;
- Optionen, die vom Hersteller angeboten werden.
Damit die Station normal funktioniert, darf der Druck in der Versorgungsleitung nicht weniger als 10 mW Wasser betragen. Sonst, im Ansaugkrümmer wird ein Unterdruck erzeugt oder eine Dichtung kann drucklos gemacht werden, gefolgt vom schmutzigen Luftsog.
Die Durchbrechung und Pumpenaggregatzufuhr wird in der Planungsphase der Wasserversorgung festgelegt. Außerdem wird jeder Station eine eigene Versorgungskategorie zugewiesen.
Wenn Wasser über weite Strecken transportiert werden muss, nimmt der Druck in der Druckleitung direkt proportional zu seiner Länge ab. Um den Druckverlust zu kompensieren, besteht daher die direkte Notwendigkeit, Booster–Stationen auf der Autobahn zu montieren. und sogar nicht einer, sondern mehrere.
Die meisten Unternehmen verfügen nicht über eine abgetrennte Wasserversorgung und verwenden allgemein Wasser der Stadt-Wasserleitungen. Der Druck der vorhandenen Rohrleitungen für die Erzeugung reicht nicht aus,und zu Spitzenstunde wird der Wasserdruck deutlich reduziert. Daher Unternehmen die einen stabilen Wasserdruck brauchen, erfordern eine Druckerhöhungsstation. Es wird direkt am Einlass Rohrleitung untergebracht. In einem Betrieb, derbraucht verfügbaren Wasserdruck. In Betriebswasserversorgungen werden häufig Aufbau benutzt, die ihre Abkühlen und Wiederverwendung ermöglichen.
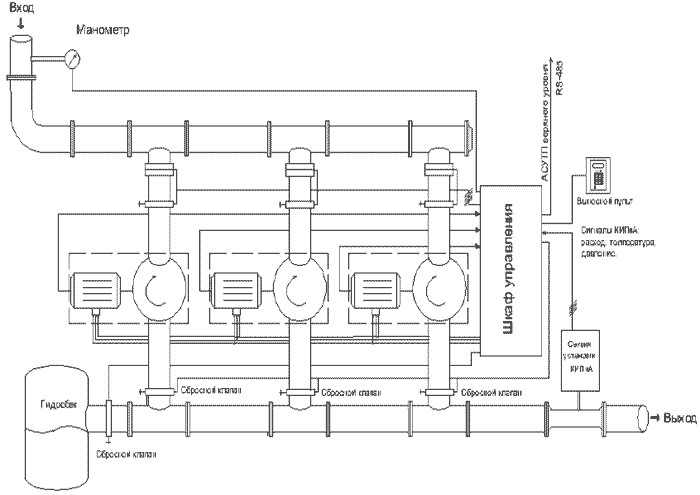
Abbildung 3 – Schema Booster–Pumpstation.
3. Rückblick und Untersuchung bekannter Lösungen zum Thema Kontrollsysteme und Kontrolle der Wasserdruckerhohung
Es gibt viele Lösungen für Automatisierungsprobleme, und viele von ihnen verwenden einen Frequenzumrichter.
In einer Linien form am Ausgang des Systems befinden sich Druck– und Durchflussmesser. Die Messwerte dieser Messgeräte beeinflussen die Frequenz Pumpenraddrehung: Wenn der Druck und die Flussrate von den eingestellten abweichen, wird ein Steuersignal an den Umrichter gesendet. Die Frequenz ändert sich und der Druck wird tendenziell eingestellt.
Im zweiten Linienform, wo der Wasserzulauf in den Behälter ausgeführt wird, ist ein Füllstandsmesser (Füllstandsanzeige) oben auf dem Tank installiert. Wenn Wasserzulauf die Ober– oder Untergrenze erreicht, wird ein Steuersignal an den Durchflussregler gesendet, und dann der Stellorgan blockiert oder nimmt Wasserzulauf in den Behälter wieder.
Es gibt auch eine Implementierung, bei der Drücke nicht am Auslass des Systems, sondern vor Druckerhöhung erzielt werden. In solchem System wird der erhaltene Druck wird mit den Sollwerten verglichen und es wird auch ein Regelsignal ausgegeben. Frequenzumrichter ändert die Drehzahl des Pumpenrades wie in der Vorgängerversion.
Bei der Vormessung des Drucks ist die Regelung nicht so scharf, als bei der Regulierung nach Abweichung.
Bei der Vormessung des Drucks ist die Regelung nicht so scharf, als bei der Regulierung nach Abweichung. In dieser Arbeit verwenden wir eine Ausführungsform des Regelungsschemas der Pumppumpstation bezüglich der Abweichung und durch vorläufige Druckmessung. Dadurch wird eine genauere Regelung möglich. Mit dem Sensor, der von der Druckerhöhungspumpen installiert ist, kann der Trockenlauf schneller und einfacher bestimmt werden.

Abbildung 4 – Das Schema der Regulierung von DHPS mit Frequenzregulierung auf einer Abweichung und mit vorläufiger Druckmessung.
4. Begrundung der Entscheidungsrichtung des Problems
Zur Verringerung des Stromverbrauchs wird eine Steuermethode verwendet, die nicht nur das Aufrechterhalten eines bestimmten Drucks zum Ziel hat, sondern auch zur Effizienzüberwachung der Pumpstation. Als Effektivitätskriterium der Pumpstation wird ihre hydraulischer Wirkungsgrad verwendet, der durch die Gleichung bestimmt wird:
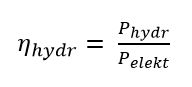
wobei Phydr — hydraulische Leistung, die Pumpenstation entwickelt, die Leistung, die durch die Pumpen übertragen wird;
Pelekt — die gesamte elektrische Gesamtleistung, die von den Antrieben verstellbarer
Pumpeneinheiten und Pumpenantrieben verbraucht wird, aus dem Netzwerknbetrieben arbeiten.
Die elektrische Leistung ist eine Meßgröße, die hydraulische (Nettoleistung) wird durch die Gleichung bestimmt:
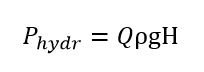
wobei Q — Pumpstationversorgung, m3/s;
ρ — Flüssigkeitsdichte kg/m3;
g — Erdbeschleunigung, m/s2;
H — voller Pumpenkopf, m
Voller Pumpenkopf:
wobei Z — Höhe der Querschnittsmitte der Rohrleitung oberhalb der Referenzebene;
р — Dampfüberdruck, der zur Quesrschnittsmitte bezogt wird;
u — durch das Verhältnis des Volumenstroms zur Querschnittsfläche des Rohrs bestimmt wird.
Der Gefällwechsel und die Leistung beim Drehzahlregelung der Laufradgeschwindigkeit für das Fliehkraftpumpengerät wird durch die untengenannten Gleichungen beschrieben. unten. Pumpenaustrittskennlinie:
wobei A2, B2, C2 — Koeffizienten, die durch die Eigenschaften der Pumpeneinheit bestimmt werden;
n — Laufradgeschwindigkeit;
Q — von der Pumpeneinheit entwickelter Durchfluss.
Die Nettoleistung der Pumpeneinheit wird durch Einsetzen von (4) in (2) bestimmt:
Die Zirkulations– und mechanische Verluste beeinflußen von der Pumpe ausgegebene Leistung beim Drehzahlwechsel. Im Allgemeinen ist die mechanische Leistungsgleichung:
wobei A, B, D — Koeffizienten, die durch die Eigenschaften der Pumpeneinheit bestimmt werden.
Für eine Regelpumpe wird der Energieverbrauch durch die Gleichung bestimmt:
wobei ηtw, ηfz — Wirkungsgrad des Elektromotors und des Frequenzumrichters.
Nehmen wir Gleichungen (5)–(7) in (1) bekommen wir die analytische Abhängigkeit der Änderung des Pumpenwirkungsgrades von der Drehzahl:

Einfluß von einstellbaren Pumpen, die im wirkungslosen Status sind, beeinflußen Ausgangsdruck der Station minimal. Man muss sofortige Wirksamkeit von Pumpenaggregaten bestimmen, um die Arbeitsineffizienz zu lösen, und dann schaltet Pumpenaggregat aus, wenn er Senkung der Effektivität unter einem bestimmten Niveau hat. Momentane Wirksamkeit wird durch die Leistung bestimmt, die jede von Pumpen verbraucht, und durch seinen Andruck und Ausfluß. Der Ausfluß wird auf der Grundlage von Pumpenpassbeschreibung und aktuelle Laufraddrehzahl eingeschätzt.
Schlussfolgerungen
Als Steuerobjekt betrachtet man eine Pumpstationanlage. Ihre Eigenschaften und einige Angaben wurden genannt.
DHPS wurde als Regulierungsobjekt betrachtet. Die Verwendung des Frequenzumrichters ist betrachtet, um die Energiekosten zu senken. Es wurden auch verschiedene Regulierungssysteme in Betracht gezogen und deren Vor– und Nachteile festgestellt. An der obengenannten Information wurdenZiele und Entwicklungsautomatisierungsaufgaben vorgeschlagen, sowie wurden die Benutzeranforderungen an das Steuerungssystem bestimmt. Die Richtungswahl der Automatisierungslösung wurde erläutert.
Literaturhinweis
- Повысительная насосная станция в системе водоснабжения и водоотведения [Электронный ресурс]. / – Режим доступа: http://moikolodets.ru/~povysitelnaya....
- Лезнов Б.С., Частотно-регулируемый электропривод насосных установок. 2013. – 176с.
- Черных И.В. Simulink: Инструмент моделирования динамических систем [Электронный ресурс]. – Режим доступа: http://matlab.exponenta.ru/simulink....
- Коренькова Т.В., Михайличенко Д.А., и др. Исследование системы ПЧ–АД–Насос–Гидросеть. — Вісник Кременчуцького державного політехнічного університету. – Випуск 2/2003(19), – с. 377.
- Попович М.Г., д.т.н., проф., Кіселичник О.І., и др. Адаптивні електромеханічні системи автоматичного керування насосними установками з векторно-керованими асинхронними двигунами. – Вісник Кременчуцького державного політехнічного університету. – Випуск 3(50)/2008 частина 1. – с.72.
- Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов.– Л.: Энергоиздат. Ленинградское отделение, 1982.– 392 с.
- Лукас В. А. Теория автоматического управления. / Лукас В. А. – М.: Недра, 1990. – 416 с.
- Зайцев Г.Ф. Теория автоматического управления и регулирования. / Зайцев Г.Ф. – Киев: Вища школа, 1988 – 431 с.