
Рисунок 1 – Предельные тяговые характеристики транспортного средства
Автор: А.Д. Чернышев
Источник: Вестник ЮУрГУ. Серия «Машиностроение». 2018. Т. 18, № 1. С. 5–16
В работе представлен расчет предельной механической характеристики тягового электродвигателя в составе электрической трансмиссии транспортного средства на примере типового автомобиля С класса. Указаны параметры необходимые для проведения расчета предельной механической характеристики. В статье приведены основные типы, используемых в настоящее время, электрических двигателей в качестве тяговых приводов, применяемых в электрических трансмиссиях: коллекторный двигатель постоянного тока, асинхронный двигатель с короткозамкнутым ротором, синхронный двигатель с возбуждением от постоянных магнитов, вентильный двигатель с самовозбуждением и вентильный двигатель с независимым возбуждением. Отмечены их главные достоинства и недостатки с точки зрения применения в качестве тягового электрического двигателя. В работе указаны силы, действующие на транспортное средство, на основе которых составлено уравнение тягового баланса.
Введение
При проектировании транспортного средства, не зависимо от типа привода, который приводит его в движение, всегда задаются определенными технико-эксплуатационными показателями. Задачей силовых агрегатов является обеспечение их выполнения. Основными эксплуатационными показателями, влияющими на выбор силовых агрегатов являются: полный вес транспортного средства G; геометрические параметры транспортного средства; количество ведущих колес n; номинальная скорость передвижения Vном; номинальный преодолеваемый подъем iном; номинальная сила тяги Fном; максимальная скорость передвижения Vмакс; предельный преодолеваемый подъем iпр; максимальная сила тяги Fмакс; мощность энергетической установки P [1].
Необходимо учитывать, что данные эксплуатационные показатели должны обеспечиваться при допустимом нагреве силовых агрегатов тяговой системы, заданном удельном расходе энергии и энергетической эффективности.
Базируясь на эксплуатационных параметрах можно определить энергетические и силовые характеристики привода. Стоит оговориться, что в силу мобильности, любое автономное транспортное средство обладает определенными ограничениями по мощности. Так максимальная мощность двигателя внутреннего сгорания, генератора, аккумуляторной батареи ТС всегда определенная величина. По этой причине предельная тяговая характеристика ТС должна соответствовать постоянству мощности [2]. Реализуемая мощность ТС равна произведению силы тяги на скорость, соответственно тяговая характеристика транспортного средства в идеальном случае соответствует закону равноплечей гиперболы [3].
Типы тяговых электрических двигателей
В качестве тягового двигателя в настоящее время применяются практически все типы электрических машин. Каждый из типов электрических машин обладает своими достоинствами и недостатками. Поэтому нельзя с полной уверенностью говорить о том, что какая-либо электрическая машина является предпочтительной в качестве тягового электродвигателя в составе электрической трансмиссии. Можно выделить основные типы электрических машин применяемых в качестве тяговых двигателей:
– Коллекторный двигатель постоянного тока обладает многими достоинствами. У него высокая перегрузочная способность, широкий диапазон регулирования скорости за счет практически линейных регулировочных характеристик и возможности ослабления магнитного потока, простота и легкость управления. Но все достоинства перекрывает наличие механического щеточноколлекторного узла, что негативно сказывается на надежности и долговечности.
– Асинхронный двигатель с короткозамкнутым ротором, при наличии современной системы управления, практически не уступает по регулирующим свойствам двигателю постоянного тока. По надежности, долговечности и массогабаритным показателям, асинхронный двигатель превосходит вышеупомянутый двигатель постоянного тока. Он обладает высокой технологичностью изготовления и низкой себестоимостью. Но несколько проигрывает по массогабаритным показателям вентильным индукторным двигателям и значительно проигрывает по массогабаритным показателям синхронным двигателям с постоянными магнитами. Кроме того, он имеет сложности с отводом тепла от ротора, в котором присутствуют достаточно большие потери.
– Синхронный двигатель с постоянными магнитами обладает высоким КПД (свыше 90 %), высокой перегрузочной способностью, наилучшими массогабаритными показателями, широким диапазоном регулирования скорости и момента, жесткими механическими характеристиками. Существенным недостатком является наличие постоянным магнитом из редкоземельных материалов, они сложны в монтаже, хрупки и ограничивают перегрев машины. По этой причине данные машины относительно дорогие и сложные в производстве. Так же из-за низкой индуктивности статорных обмоток необходимо применять специальные технические решения.
– Вентильный реактивный двигатель с самовозбуждением очень прост, технологичен и дешев. ВИД обладает высокой перегрузочной способностью, широким диапазоном регулирования скорости и момента, высоким КПД в широком диапазоне изменения нагрузки и скорости, хорошими теплоотводными свойствами. Обладает тяговой механической характеристикой. К недостаткам следует отнести пульсации момента, обусловленные двойственной зубчатостью магнитной системы и необходимость специального силового преобразователя.
– Вентильный реактивный двигатель с независимым возбуждением обладает многими достоинствами ВИД с самовозбуждением, и обладает малыми пульсациями момента. К недостаткам следует отнести: необходимость специальных подшипников, исключающих замыкание магнитного потока по ним, так же он довольно сложен в изготовлении из-за наличия обмотки возбуждения.
Важным преимуществом вентильного реактивного двигателя является то, что он обладает тяговой механической характеристикой, характеристикой постоянной мощности. Несомненно, другие типы двигателей, например, асинхронный двигатель с короткозамкнутым ротором, синхронный двигатель на постоянных магнитах, могут реализовать заданную характеристику. Но при их применении скорее всего придется использовать электрическую машину завышенной мощности, как это сделано в автомобилях Tesla, где используется асинхронный двигатель. Это несомненно приведет к ухудшению массогабаритных показателей системы электропривода.
Тяговый расчет транспортного средства
В силу вышеизложенного одной из первоочередных задач, ставящихся перед проектировщиками, является определение мощности силовых агрегатов и предельной тяговой характеристики ТС.
Можно построить предельную тяговую характеристику. Для этого необходимо определить ключевые точки, которые задаются тремя характерными участками (рис. 1).
Рисунок 1 – Предельные тяговые характеристики транспортного средства
Отрезок AB характеризует максимальное тяговое усилие. Точка B определяет граничную скорость максимального тягового усилия. Точка D определяет наибольшее тяговое усилие при максимальной скорости. Участок BD определяется выбранной мощностью автономной установки. Точка C определяется максимальным тяговым усилием при номинальном угле подъема и номинальной скорости. Точка C предопределяет энергетическую эффективность системы. В этой точке система привода должна реализовать максимальный КПД. Поэтому номинальная скорость должна соответствовать скорости преобладающей при заданных эксплуатационных условиях.
Испытательные ездовые циклы
В настоящее время для всех ТС производится измерение расхода топлива (для транспортных средств с ДВС) или запаса хода (для электрических транспортных средств). Рассмотрим расчет тяговой характеристики электродвигателя электромобиля или автомобиля с комбинированной энергетической установкой. В данном случае обязательно нужно ориентироваться на испытательные ездовые циклы. Ездовые циклы формируются на основе статистического анализа езды. Используя их можно определить основные параметры движения. Также можно проверить соответствие силовых и мощностных характеристик АТС реальным условиям.
В европейской методике использовался ездовой цикл NEDC (New European Driving Cycle) (рис. 2, а). В США использовались два ездовых цикла: FTP-75 (Federal Test Procedure) (рис. 2, в) и HWFET (HighWay Fuel Economy Test) (рис. 2, г). В Японии используется методика JC08 (рис. 2, б). К сожалению, данные методики устарели и не соответствуют современному характеру движения. Это связанно с тем, что количество транспортных средств на автомобильных дорогах продолжает неуклонно расти. А значит величины ускорения, средние и максимальные скорости, сама последовательность режимов движения изменяется. К тому же используемые ездовые циклы не предполагалось использовать для тестирования электромобилей и автомобилей с комбинированной энергетической установкой.
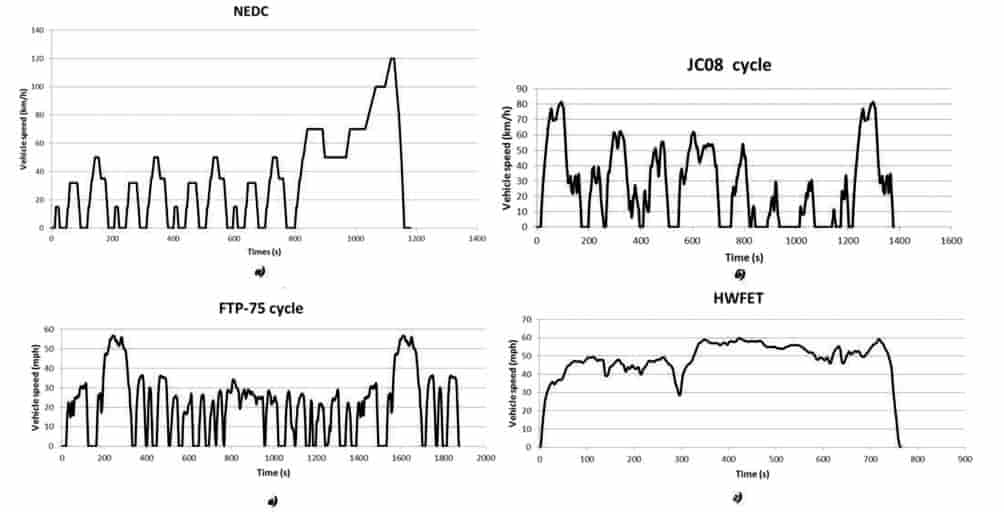
Рисунок 2 – Испытательные ездовые циклы: а – NEDC; б – JC08; в – FTP-75; г – HWFET
В прошлом году был представлен единый общемировой ездовой цикл WLTC (Worldwide harmonized Light vehicles Test Cycles) (рис. 3), который имеет подразделение на три класса, в зависимости от мощности АТС:
– 1-й класс: не более 22 кВт/т;
– 2-й класс: свыше 22 кВт/т, но не более 34 кВт/т;
– 3-й класс: свыше 34 кВт/т.
WLTC наилучшим образом соответствует современным критериям движения транспорта как в городе, так и на трассе. И так как данный цикл основан на основе статистического анализа действующего трафика, то можно утверждать, что при разработке АТС нужно основываться на испытательном ездовом цикле. Мощностные и тяговые характеристики транспортного средства должны позволять выполнить WLTC.
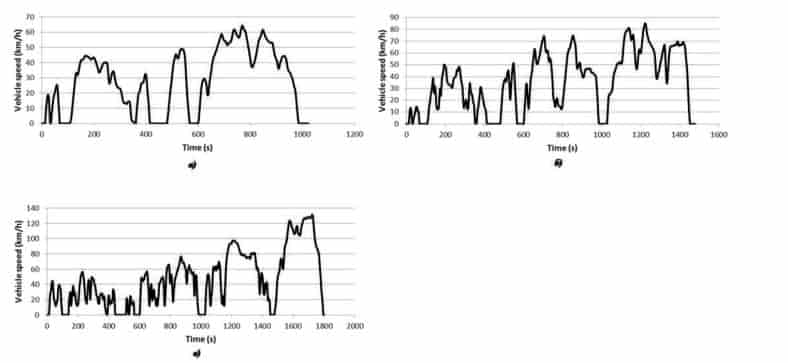
Рисунок 3 – Испытательный ездовой цикл WLTC: а – цикл для 1 класса; б – цикл для 2 класса; в – цикл для 3 класса
При создании электромобиля или автомобиля с комбинированной энергетической установкой, одной из задач является установление совокупности взаимосвязей между тяговым электроприводом и заданными тягово-динамическими характеристиками АТС.
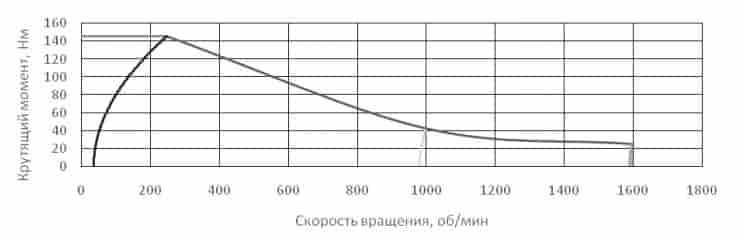
Рисунок 4 – Механическая и нагрузочные характеристики тягового электропривода
В результате была получена механическая характеристика, которая позволяет проектировать электрическую машину с помощью современных программных комплексов.
Заключение
В результате была предложена методика тягового расчета автомобиля с электрической трансмиссией базирующаяся на ездовом цикле. Рассчитана предельная механическая характеристика тягового электропривода, которая удовлетворяет требованиям WLTC для соответствующего класса автомобиля. Были рассчитаны характерные точки предельной механической характеристики. Был осуществлен расчет для типового городского автомобиля C класса.
1. Радионов, А.А. Математическая модель движения автомобиля / А.А. Радионов, А.Д. Чернышев
// Инновационный транспорт. – 2015. – № 4 (18). – С. 69–73.
2. Сташинов, Ю.П. Об оптимальной тяговой характеристике привода рудничного электровоза
и путях ее реализации / Ю.П. Сташинов, А.С. Семенчук, Д.В. Волков // Горный информационно-аналитический
бюллетень (научно-технический журнал). – 2008. – № 7. – С. 354–358.
3. Аналитическое моделирование тяговой характеристики электромобилей и автомобилей
с комбинированной энергетической установкой / В.И. Строганов, В.Н. Козловский, А.Г. Сорокин,
Л.Н. Мифтахова // Вестник Казанского технол. ун-та. – 2014. – № 7. – С. 107–112.
4. Основы электрического транспорта / М.А. Слепцов, А.В. Прокопович, Т.И. Савинова,
В.Д. Тулупов. – М.: Издат. центр «Академия», 2006. – 464 с.
5. Сташинов, Ю.П. Тяговый привод шахтного аккумуляторного электровоза на базе двигателей
с независимыми обмотками возбуждения / Ю.П. Сташинов // Горный информационноаналитический
бюллетень (научно-технический журнал). – 2009. – № 12. – С. 210–215.