Аннотация
B. Polnik, Z. Budzynski, B. Miedzinski Эффективное управление аккумуляторной батареей локомотивной установки
В статье рассматриваются преимущества и недостатки существующих горных локомотивных двигателей используемых подземных шахтах. Был представлен новый метод двигательной установки с рекуперацией энергии.
Ключевые слова: аккумулятор, электровоз, рекуперация энергии
Введение
Локомотив с аккумуляторным питанием является одним из средств перевозки людей, руды и материалов под землёй в шахтах. Их главное преимущество - отсутствие выброса выхлопных газов, что является основной проблемой в случае использования дизельных локомотивов в шахтах. Шахтные аккумуляторные локомотивы не требуют специального обслуживания, кроме замены аккумуляторов.Время их работы ограничено зарядом аккумулятора.
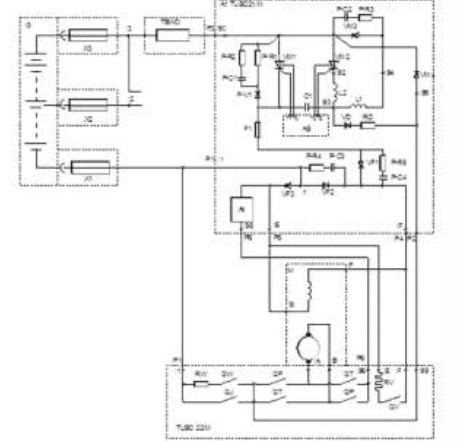
Локомотивы Lea BM-12 (рис. 1) являются самыми популярными в шахтах.

Эти локомотивы работают уже давно, так как они были изготовлены в 1970-х годов. Теперь их производство остановилось и их можно только отремонтировать или модернизировать. Следует отметить, что в горнодобывающей промышленности были найдены и другие виды локомотивов, но ни один из не стал достаточно популярным.
Одиночный электродвигатель используется в существующих приводах локомотива серии Леа БМ-12. Это двигатель постоянного тока серии (тип LDS245) номинальной мощностью 15 кВт и мгновенной мощностью до 38 кВт. Он ведет вал локомотива с обоих концов одновременно (соответствующим механическим редуктором) что является большим преимуществом по сравнению с другими решениями, где либо одна ось приводится в движение, либо используются два независимых двигателя с меньшей мощностью. Управление питанием и скоростью вращения осуществляется на основе тиристорного переключателя постоянного тока, который является преобразователем постоянного тока. Он может работать в режиме включения или выключения вне зависимости от временного интервала. Силовой электронный ключ обеспечивает плавный пуск двигателя и восстановление энергии в тяговых клетках. Запуск и пуск реализуется в диапазоне от 80 до 295 А, ток торможения от 80 A до 200 A, при экстренном торможении (посредством рукоятки) 150 А.
В настоящее время ожидания и потребности пользователей шахтных аккумуляторных локомотивов гораздо выше. Есть следующие основные требования:
– достаточно длительное время работы без необходимости замены батарей,
– система зарядки должна быть совместима с той, которая используется в шахте,
– высокая сила тяги, позволяющая перевозить тяжелый вес грузов,
– высокая скорость перевозки,
– высокая надежность.
Для удовлетворения вышеуказанных требований необходимо применять соответствующие изменения относительно структуры системы привода, касающиеся эффективного контроля за уровнем рекуперации энергии.
Документ представляет и обсуждает результаты таких предпринятых мер и формулирует выводы и рекомендации по эксплуатации на практике.
Список использованной литературы
1. Z. Budzynski, B. Polnik, “Quality of electric energy recovered during
electrical braking of mine battery locomotive as one of criteria of
improvement of efficiency of mining machine drive system”, XIV
Konferencja Elektryki Gorniczej, Zakopane, 2012, pp. 89–98.
2. Z. Budzynski, B. Polnik, “Mechatronic system for control and drive
of battery railways designed for operation in explosive atmosphere”,
Maszyny Gornicze, vol. 2, 2011, pp. 45–51.
3. B. Polnik, “Intelligent management of energy recuperation process of
mine battery locomotive”, Mechanizacja i Automatyzacja Gornictwa,
vol. 12, pp. 36–40, 2012.
4. Z. Budzynski, B. Polnik, T. Gasior, “Compare analyses between
PMSM and IM mine locomotives drives”, Maszyny Gornicze, vol. 4,
pp. 31–37, 2011.
5. A. Cifci, Y. Uyaroglu, S. Birbas, “Direct field oriented controller
applied to observe its advantages over scalar control”, Elektronika ir
Elektrotechnika (Electronics and Electrical Engineering), no. 3,
pp. 15–18, 2012.
6. A. Ejlali, D. A. Khaburi, J. Soleimani, “Sensorless field oriented
control strategy for single phase line-start PMSM drive”, Electrical
Review, vol. 10, pp. 229–232, 2012.
7. S. Guo, J. He, “Sensorless control of PMSM based on adaptive
sliding mode observer”, Int. Journal of Modelling, Identification and
Control, vol. 4, pp. 321–324, 2009.
8. M. S. Ahmed, N. A. A. Manap, M. Faeq, D. Ishak, “Improved torque
in PM brushless motors with minimum difference in slot number and
pole number”, Journal of Power and Energy Conversion, vol. 3, pp.
206–219, 2012.
9. B. Polnik, “Testing on the real object the higher harmonics of current
during operation of supply-and-control system of mine battery
locomotive”, unpublished.
10. T. Biskup, “Initial rotor position estimation of permanent magnet
synchronous machine”, Electrical Review, vol. 4, pp. 157–162, 2012.
11. R. Dolecek, O. Cerny, J. Novak, M. Bartlomiejczyk, “Interference in
power system for traction drive with PMSM”, Electrical Review,
vol. 9, pp. 204–207, 2012.
12. P. Vas, Vector control of AC machines. Oxford: Clarendon Press,
1990.
13. E. Bayoumi, “Deadbeat direct torque control for permanent magnet
synchronous motors using particle swarm optimization”, Int. Journal
of Power Electronics, vol. 5, pp. 301–315, 2013.
14. L. Qin, X. Zhou, P. Cao, “New control strategy for PMSM driven
bucket wheel reclaimers using GA-RBF neural network and sliding
mode control”, Elektronika ir Elektrotechnika (Electronics and
Electrical Engineering), no. 6, pp. 113–116, 2012.
15. B. Czajka, E. Jankowska, M. Baraniak, “Influence of lead alloy
composition on grid corrosion in lead-acid batteries”, Corrosion
Protection, no. 4, pp. 162–164, 2013.