Аннотация
Габибов Р.Ю., Николаенко Д.В. Обзор методов автоматического определения местоположения при проектировании цифровых устройств. В статье рассмотрены особенности классификации и принципы функционирования методов применяемых в автоматизированных системах определения координат передвижения транспортных средств в режиме реального времени. Выделены преимущества и недостатки каждого из исследованных методов.
Введение
В последнее время все большее распространение в мире получают системы и автоматизированные комплексы технических средств определения местоположения подвижных объектов. Эти системы используются не только для слежения для за передвижением объектов, определения их местоположения, корректировки маршрута, но и для получения данных, которые в последующем будут использованы в других системах, позволяющих обеспечить контроль, безопасность и надежность средств передвижения. Они различаются по методам определения координат объектов, способам передачи информации между подвижными объектами и диспетчерскими пунктами, логикой построения.
Обзор методов
С точки зрения реализации функций местоопределения системы «AVL» (Automatic Vehicle Location system) характеризуются следующими техническими характеристиками, как точность местоопределения и периодичность уточнения данных.
Логично предположить, что эти параметры во многом зависят от зоны действия «AVL» -системы. Чем меньше размер исследуемой зоны действия, тем соответственно выше должна быть точность местоопределения. Таким образом, для локальных систем, действующих на территории города, считается достаточной точность местоопределения от 100 до 200 м.
В то же время, стоит отметить, что некоторые специальные системы требуют точности до единиц метров, для глобальных систем бывает достаточно точности до единиц километров. Периодичность же уточнения данных может колебаться от нескольких минут до часов. Как и в основе любой автоматизированной системы — так и в «AVL»-системах для определения местоположения, используются методы, которые можно разбить на три основных категории:
1. Методы приближения (зоновые).
В данном методе для определения местоположения подвижного объекта на территории выбранного участка создается сеть контрольных зон. Это реализуется при помощи использования большого количества дорожных указателей или контрольных пунктов (КП1 — КПn), точное местоположение которых будет заранее известно и заложено в системе. В этом случае местоположение транспортного средства будет, определяется по мере прохождения зон действия этих пунктов путем передачи по радиоканалу в бортовую аппаратуру транспортного средства уникального кода, который, в свою очередь, через подсистему передачи данных передает эту информацию, а также свой идентификационный код в подсистему управления и обработки данных — реализуется метод прямого приближения[1].
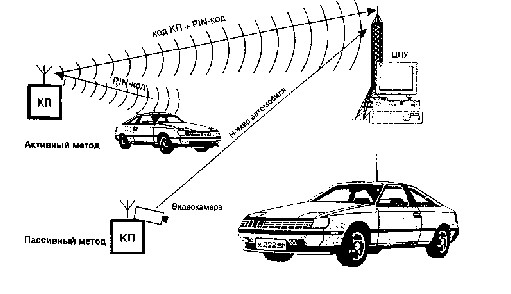
Рисунок 1 – Метод приближения
Достоверность получаемой информации при использовании данного метода во многом зависит от количества и расположения контрольных пунктов, а следовательно данный метод требуют развитой инфраструктуры связи для организации подсистемы передачи данных и большого числа таких пунктов — это требует дорогой и сложной аппаратуры, используемой на всех контрольных пунктах, а поэтому использовать данный метод на участках, охватывающих большие территории, например, в городах — нецелесообразно.
2. Методы определения местоположения по радиочастоте.
В данном методе местоположение транспортного средства определяется путем измерения разности расстояний транспортного средства от трех или более относительных позиций. Стоит отметить, что данный метод условно можно разбить на две подгруппы:
радиопеленгация, когда абсолютное или относительное местоположение подвижного объекта определяется при приеме излучаемого им радиосигнала сетью стационарных или мобильных приемных пунктов.
С помощью, распределенной по территории города сети пеленгаторов или с помощью мобильных средств пеленгации возможно отслеживание местоположения объектов, оборудованных радиопередатчиками-маяками.
На практике метод пеленгации, как наиболее дешевый в начальные годы становления систем спутниковой навигации (когда стоимость спутниковых приемников измерялась тысячами долларов), был опробован полицейскими и пожарными службами США и Канады. Результаты опытной эксплуатации системы показали, что она может очень хорошо использоваться на открытой местности. Однако данная система имеет большие погрешности в условиях плотной городской застройки. Кроме того, стоимость инфраструктуры, необходимой для охвата значительной площади, весьма велика. В настоящее время этот метод используется очень редко.
Принцип работы системы заключается в следующем. Прием сигнала, излучаемого малогабаритным радиомаяком на подвижном объекте, осуществляется сетью стационарных радиоприемных центров, и по полученным данным производится с помощью математических операций определение местоположения автомашины с наибольшей вероятностью. Применение широкополосных сигналов с базой 103 –108 обеспечивает частоту обновления информации один раз в секунду в системе из 5000 объектов при высокой помехозащищенности. Точность местоопределения зависит от плотности размещения стационарной радиоприемной сети на территории города и может составлять единицы метров в режиме непрерывного слежения и корректировки данных по электронной карте[2].
вычисление координат по результатам приема специальных радиосигналов на борту подвижного объекта
3. Методы навигационного счисления.
Космическая радионавигация воплотила в себе новейшие достижения компьютерных и телекоммуникационных технологий. Симбиоз спутниковой системы позиционирования, современной радиосвязи и электронной картографии позволяет определять местоположение и скорость транспортного средства, вычислять расстояния, прокладывать маршруты и отслеживать их соблюдение, получать справки о картографических объектах. На сегодняшний день работают две системы: американская «Navstar» и отечественная «ГЛОНАСС»[3], принцип работы которой представлен на рис.2.
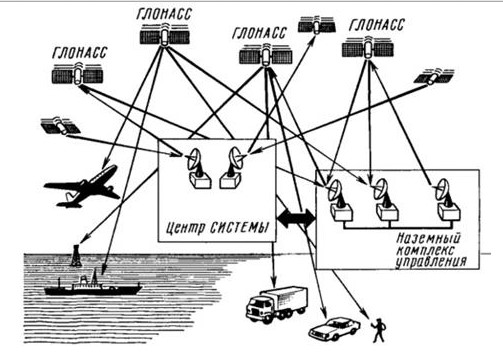
Рисунок 2 – Принцип работы системы «ГЛОНАСС»
Применение данных систем позволяет наиболее точно определять координаты и повышает надежность функционирования, а соответственно и качество передаваемой информации системам использующим в своей работе данные о передвижении.
Методы на основе радионавигации реализуются в системах «AVL» на основе импульсно-фазовых наземных навигационных систем (типа LORAN-C, Чайка) и спутниковых среднеорбитальных навигационных систем (СРНС) «Navstar» и «ГЛОНАСС». Наилучшие точностные и эксплуатационные характеристики в настоящее время имеют спутниковые навигационные системы, в которых достигается точность местоопределения в стандартном режиме не менее 50—100 м, а с применением специальных методов обработки информационных сигналов в режиме фазовых определений или дифференциальной навигации — до единиц метров.
Применяемый в системе принцип состоит в том, что специальные приемники, установленные у потребителей, измеряют дальность до нескольких спутников и определяют свои координаты по точкам пересечения поверхностей равного удаления.
Дальность вычисляется по формулам, известным из школьных учебников, путем умножения скорости распространения радиосигнала на время задержки, при прохождении им расстояния от спутника до пользователя. Величина временной задержки определяется сопоставлением кодов сигналов, излучаемых спутником и генерируемых приемным устройством, методом временного сдвига до их совпадения. Временной сдвиг измеряется по часам приемника. Координаты спутников известны с высокой точностью. Для нахождения широты, долготы, высоты, исключения ошибок часов приемника достаточно решить систему из четырех уравнений. Поэтому приемник пользователя должен принимать навигационные сигналы от четырех спутников.
Скорость определяется по доплеровскому сдвигу несущей частоты сигнала спутника, вызываемому движением пользователя. Доплеровский сдвиг (Doppler shift) замеряется при сопоставлении частот сигналов, принимаемых от спутника и генерируемых приемником. Разумеется, все это происходит мгновенно и без какого либо участия пользователя[3].
Достоинствами данного метода являются масштабность местоопределения, что позволяет использовать его практически на любых территориях и любой протяженности. Хорошая точность, возможность определить положение объекта не карте местности, способность определять не только координаты, но и высоту, скорость и направление движения объекта, высокая степень совместимости с автоматизированными системами обработки информации. Также стоит подчеркнуть, что у подобных систем самая широкая область применения, начиная от диспетчеризации городского транспорта до обеспечения безопасности транспорта и материальных ценностей, работающие в реальном масштабе времени на территории города с десятками и сотнями подвижных объектов.
Выводы
Таким образом, подводя итог проведенному исследованию основных доступных методов автоматизированного определения местоположения движущихся транспортных можно сделать вывод, что в рамках густонаселенных и застроенных населенных пунктов наиболее оптимальным будет применение методов навигационного счисления. Данный метод наиболее глобален при равных затратах, а также предоставляет весь спектр информации, которая в дальнейшем может быть использована в качестве исходных данных для разработки и проектирования цифровых устройств.
Список использованной литературы
1. Андрианов, А. В. Автомобильные охранные системы [Текст] / В.И. Андрианов, А.В. Соколов // Санкт-Петербург, BHV Арлит, 2000 г. – С. 272.
2. Драбкин, А. Л. Антенно-фидерные устройства [Текст] / А.Л. Драбкин, В.Л. Зузенко, А.Г. Кислов// Москва, «Советское радио», 1974 г. – С. 536.
3. Познайка.Орг [Electronic resourse] / Интернет-ресурс. - Режим доступа : www/ URL: http://poznayka.org/s55258t1.htm. - Загл. с экрана.