Аннотация
Bandini Stefania, Manzoni Sara, Vizzari Giuseppe Моделирование и моделирование на основе агентов: перспектива информатики. Термин компьютерное моделирование связано с использованием вычислительной модели, чтобы улучшить понимание поведения системы и / или оценить стратегии ее работы в объяснительных или прогнозирующих схемах. Бывают случаи, когда практические или этические причины не позволяют реализовать прямые наблюдения: в этих случаях возможность реализации экспериментов «in-machina» может представлять собой единственный способ изучить, проанализировать и оценить модели этих реалий. Различные ситуации и системы характеризуются наличием автономных объектов, локальное поведение которых (действия и взаимодействия) определяет эволюцию всей системы; модели на основе агентов особенно подходят для поддержки определения моделей таких систем, но также для поддержки проектирования и внедрения симуляторов. Атомно-ориентированные модели и мультиагентные системы (МАС) были спроектированы для имитации очень разных видов сложных систем, от моделирования социально-экономических систем до разработки сценариев оптимизации логистики, от биологических систем до городского планирования. В настоящем документе обсуждаются конкретные аспекты этого подхода к моделированию и моделированию с точки зрения информатики, описывающие типичные элементы моделирования на основе агентов и соответствующие исследования.
Вступление
Термин компьютерное моделирование означает использование вычислительной модели для получения дополнительной информации о поведении сложной системы (например, биологических или социальных системах), предполагая последствия выбора модели, а также оценивать конструкции и планы, не создавая фактически их существование в реальный мир (например, архитектурные проекты, дорожные сети и светофоры). Использование этих «синтетических сред» на самом деле часто необходимо, потому что имитированная система фактически не может наблюдаться (поскольку она фактически разрабатывается), а также для этических (например, безопасность людей будет задействована) или практических причин (например, затраты экспериментов или сбора данных, наблюдение за системами, характеризующимися очень медленной эволюцией). Общая схема (основанная на нескольких разработках, 2005) и Edmonds (2001), описывающие роль симуляции в качестве прогностического или объяснительного инструмента, показаны на рисунке 1.
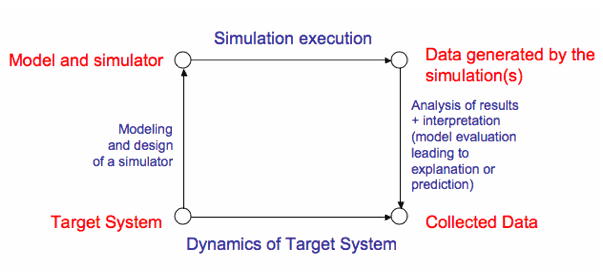
Рисунок 1 - Общая схема, описывающая использование моделирования в качестве прогностического или объяснительного инструмента
Многие ситуации и подсистемы можно рассматривать как характеризующиеся наличием ряда автономных объектов, поведение которых (действия и взаимодействия) определяют (нетривиальным образом) эволюцию всей системы. Агентные модели особенно подходят для решения этих ситуаций, и они поддерживают изучение и анализ таких тем, как децентрализованное принятие решений, локально-глобальное взаимодействие, самоорганизация, возникновение и влияние неоднородности в моделируемой системе. Растет интерес к этому относительно недавнему подходу к моделированию и моделированию, о чем свидетельствует количество научных событий, сфокусированных в этом вопросе (см., Чтобы привести некоторые примеры, основанные на контексте компьютерной науки, серию семинаров по мультиагентному моделированию ( Sichman et al 1998 ,Moss and Davidsson 2001 , Sichman et al. 2003 , Hales et al. 2003 , Davidsson et al. 2005 , Sichman and Antunes 2006 ), семинар IMA по моделированию на основе агентов и симпозиум по моделированию и моделированию на основе агентов ( Bandini et al., 2006a , Bandini et al., 2008 ). Модели, основанные на (в определенной степени) автономных агентах, были успешно применены для моделирования сложных систем в самых разных контекстах: от оптимизации логистики (см., Например, Weyns et al., 2006 ) до биологических систем (см., Например, Bandini et al., 2006b ), к трафику (см., например, Bazzan et al., 1999 ,Wahle and Schreckenberg 2001 , Balmer and Nagel 2006 ) и симуляции пешеходов (см., Например, Batty 2001 ), к городскому планированию (см., Например, Arentze and Timmermans 2003 ). Агентные модели также широко изучались и успешно применялись в социальных науках ( Epstein 1999 ) и экономике (см., Например, Lane 1993a , Lane 1993b , Windrum et al., 2007 ).
Крайняя неоднородность в имитируемых реалиях часто связана с тем, что, особенно в этом контексте ориентированных на агентов исследовательских влияний, происходят из самых разных областей исследований. Рассмотрим, например, модели динамики движения и пешеходов : большое количество подходов, основанных на агентах, сильно зависит от физики , а связанные модели рассматривают пешеходов как агентов, которые по существу являются частицами, подверженными силам, создаваемым окружающей средой, а также другие агенты (например, активные модели ходунков , такие как Helbing et al., 1997 ). Другие подходы к моделированию и моделированию пешеходов основаны на опыте с пешеходными моделями Cellular Automata (CA) (см., Например,Schadschneider et al. 2002 ), но обеспечивают более четкое разделение между окружающей средой и субъектами, которые населяют, действуют и взаимодействуют в ней (см., Например, Bandini et al., 2004 , Henein and White, 2005 ). Эта линия исследований приводит к определению моделей для локализованных МАС, типа модели, которая также была определена и успешно применена в контексте (реактивной) робототехники и систем управления ( Weyns and Holvoet 2006b , Weyns et al., 2005 ). Модели и симуляторы, определенные и разработанные в контексте социальных наук ( Гилберт и Тройц 2005 ) и экономики ( Pyka and Fagiolo, 2009 ), основаны на разных теориях (часто не ортодоксальных) поведения человека чтобы получить дополнительную информацию об этом и помочь построить и утвердить новые теории.
Все вышеупомянутые подходы, а также многие другие, которые описывают себя как на основе агентов, имеют общую точку зрения на смоделированную систему: аналитическая единица представлена ??отдельным агентом, действующим и взаимодействующим с другими объектами в общей среде. Общая динамика системы не определяется с точки зрения глобальной функции, а скорее результатом действий и взаимодействий отдельных лиц. Хотя агенты играют таким образом ключевую роль в этом подходе, следует также отметить, что в большинстве внедренных доменов приложений окружающая среда, в которой они расположены, играет важную роль, поскольку:
- он глубоко влияет на поведение моделируемых объектов, с точки зрения восприятия и допускаемых действиями агентов;
- целью моделирования является наблюдение за некоторым уровнем совокупного уровня (например, плотность определенных типов агентов в области окружающей среды, средняя длина данного пути для мобильных агентов, генерация кластеров агентов и т. д.), что может фактически наблюдаться только в окружающей среде.
Помимо этих общих элементов, методы моделирования на основе агентов часто резко различаются в зависимости от того, как описываются агенты, как с точки зрения свойств, так и поведения. Аналогичное соображение может быть сделано для их окружающей среды (см., Например, вклады Дейхселя и Пики 2009 и Бреннера и Веркера 2009 в этом специальном разделе).
Учитывая приведенные выше соображения, основная цель настоящей статьи - не представлять конкретного технического вклада, а скорее описывать очень абстрактную и общую модель, которая может быть принята для анализа, описания и обсуждения различных моделей, конкретных экспериментов по моделированию, платформ, которые из различные точки зрения на законных основаниях утверждают, что они применяют агентский подход. Модель показана на рисунке 2.
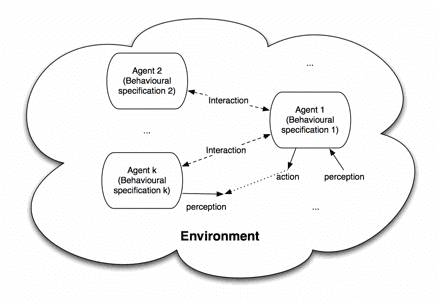
Рисунок 2 - Абстрактная модель для анализа, описания и обсуждения различных моделей, конкретного опыта моделирования, платформы, законно претендующие на принятие агентского подхода
В частности, основными элементами этой эталонной модели являются:
- агенты, охватывающие, возможно, гетерогенную поведенческую спецификацию;
- их окружающая среда, снабжая агентов их восприятием и способствуя их действиям;
- механизмы взаимодействия между агентами: эти механизмы могут либо включать прямой обмен информацией между вовлеченными субъектами, либо косвенный, реализуемый посредством возможного восприятия агентом эффектов действия другого агента.
В следующем разделе эти элементы анализируются со ссылкой на литературу по информатике о моделях и технологиях на основе агентов, а также вводятся классификации и типологии для организации и сравнения различных подходов. В разделе 3 кратко рассматриваются доступные платформы, поддерживающие быстрое прототипирование или разработку симуляций на основе агентов. Дискуссия о будущих направлениях этой многодисциплинарной исследовательской области закроет нашу статью.
Модели на основе агентов для моделирования
Модель представляет собой абстрактное и упрощенное представление данной реальности, либо уже существующей, либо планируемой (целевой системы), в терминологии, принятой на рисунке 1). Модели обычно определяются для изучения и объяснения наблюдаемых явлений или для прогнозирования будущих явлений. Агентные модели для моделирования, как упоминалось ранее, характеризуются наличием агентов, выполняющих какое-то поведение в общей среде. Однако понятие агента является противоречивым даже в ограниченном сообществе компьютерных ученых, занимающихся исследованиями агентских моделей и технологий ( Franklin and Graesser 1997 ). Наиболее распространенное определение агента ( Wooldridge and Jennings 1995) определяет набор свойств, которые должны характеризовать объект, чтобы эффективно называть его агентом и, в частности, автономию (возможность работать без вмешательства человека и определенную степень контроля над своим собственным состоянием), социальные способности (возможность взаимодействовать с использованием какого-либо коммуникационного языка агента, понятие, которое будет более подробно проанализировано в разделе 2.3), реактивность (возможность воспринимать среду, в которой она расположена, и реагировать на воспринимаемые изменения) и проактивность (возможность проявлять инициативу, начиная какую-то деятельность в соответствии с внутренними целями, а не как реакцию на внешний стимул). Авторы считают это слабымопределение агентства, хотя, как правило, уже слишком ограничительно охарактеризовать как агенты, большинство из которых объединяют агенты, основанные на модели, для моделирования в разных областях. Даже если расстояние между контекстом исследования интеллектуальных агентов и симуляцией на основе агентов нельзя пренебрегать, поскольку последние часто более сфокусированы на возникающем поведении локального действия и взаимодействии относительно простых агентов, цель этого раздела - представить некоторые релевантные результаты исследований моделей и технологий агентов в области информатики и сопоставления их с текущими исследованиями моделирования на основе агентов в других областях исследований.
Как было предложено ранее, модели на основе агентов (ABM) можно рассматривать как модели сложных систем, и подход ABM считает, что простые и сложные явления могут быть результатом взаимодействия между автономными и независимыми объектами (т.е. агентами), которые действуют в сообществах в соответствии с различными способы взаимодействия. Таким образом, агенты и ПРО не следует рассматривать просто как технологию ( Zambonelli and Parunak 2002 , Luck el al., 2005 ), но также как подход моделирования, который может быть использован для представления некоторых свойств системы, которые не просто описываются как свойства или функциональные возможности компоненты единой системы, но иногда возникают из коллективного поведения ( Ferber 1999). Изучение таких возникающих форм поведения является типичной активностью в области моделирования сложных систем ( Bar-Yam 1997 ), а модели на основе агентов все чаще используются для изучения сложных систем (см., Например, Hassas et al., 2007 , Weyns et al., 2007). , Alfi et al., 2007 года, семинары 2007 года на Европейской конференции по сложным системам).
Спецификация поведения агента
Специфика поведения агентов может рассматриваться как состоящая из двух элементов. Прежде всего, необходимо дать правильное представление действий агента . Действия - это элементы, лежащие в основе поведения агентов: они могут вызывать изменения в их среде или в других агентах, составляющих ПРО. Для описания действий агентов могут быть предоставлены различные решения для моделирования (подробнее см. Ferber 1999 ), например:
- преобразование глобального состояния системы;
- локальное изменение окружающей среды;
- ответ на воздействия , связанные с восприятием агента;
- выполнение вычислительных процессов , осуществляемых внутренним агентом для разработки воспринимаемых данных и изменения собственного состояния;
- физическое перемещение агента в пространственной структуре окружающей среды.
Однако поведенческая спецификация агентов также включает механизмы, эффективно выбирающие действия, которые должны выполняться, в соответствии с восприятием и внутренним состоянием агента. Термин архитектура ( Russel and Norvig 1995 ) относится к модели внутренней структуры агента, которая отвечает за выбор действий. Были предложены различные архитектуры для получения специфического поведения агентов, и они, как правило, классифицируются как совещательные и реактивные (соответственно гистерезисные и тропические в соответствии с классификацией, описанной в Genesereth 1987).
Реактивные агенты являются элементарными (и часто без памяти) агентами с определенной позицией в среде. Реактивные агенты выполняют свои действия как следствие восприятия стимулов, поступающих либо от других агентов, либо из окружающей среды; как правило, поведенческая спецификация этого вида агента представляет собой набор правил условия действия с добавлением стратегии выбора для выбора действия, которое должно выполняться всякий раз, когда могут быть активированы все правила. В этом случае мотивация для действия происходит от инициирующего события, обнаруженного в среде; эти агенты не могут быть активными.
Намеренные или когнитивные агенты характеризуются более сложным механизмом выбора действий, и их поведение основано на так называемых психических состояниях, на фактах, представляющих знание агентов об окружающей среде и, возможно, также на воспоминаниях о прошлом опыте. Связующие агенты, для каждой возможной последовательности восприятий, пытаются выбрать последовательность действий, позволяющих им достичь заданной цели. Удовлетворительные модели, обычно определяемые в контексте планирования, обеспечивают символическое и явное представление мира внутри агентов, и их решения основаны на логических рассуждениях и манипуляциях с символами. Модель BDI («Убеждение, желание, намерение») ( Rao and Georgeff 1991 , Rao and Georgeff 1995), возможно, является самой распространенной моделью для совещательных агентов. Внутреннее состояние агентов состоит из трех «структур данных» относительно убеждений, желаний и намерений агентов. Верования представляют информацию агентов об окружающем их мире; желания - это цели агентов, в то время как намерения представляют собой желания, которые агент фактически выбрал, что он должен в некоторой степени совершить сам.
Гибридные архитектуры также могут быть определены путем объединения предыдущих. Агенты могут иметь многоуровневую архитектуру, где совещательные слои основаны на символическом представлении окружающего мира, они генерируют планы и принимают решения, а реактивные слои выполняют действия как эффект восприятия внешних раздражителей. Для структурирования слоев были предложены как вертикальные, так и горизонтальные архитектуры ( Brooks 1986). В горизонтальной архитектуре никакие приоритеты не связаны с уровнями, и результаты разных слоев должны быть объединены для получения поведения агента. Когда слои расположены в вертикальной структуре, реактивные слои имеют более высокий приоритет по сравнению с совещательными, которые активируются только тогда, когда реактивное поведение не вызвано восприятием внешнего раздражителя.
МАС может состоять из когнитивных агентов (как правило, относительно небольшое количество совещательных агентов), каждый из которых обладает своей собственной моделью знаний, определяющей ее поведение и взаимодействие с другими агентами и окружающей средой. Напротив, может существовать МАС, создаваемый только реактивными агентами. Этот тип системы основан на идее, что нет необходимости, чтобы один агент был индивидуально интеллектуальным для того, чтобы система демонстрировала сложные (интеллектуальные) поведения. Системы реактивных агентов обычно более устойчивы и отказоустойчивы, чем другие системы на основе агентов (например, агент может быть потерян без какого-либо катастрофического эффекта для системы). Другие преимущества реактивных MAS включают гибкость и адаптивность в отличие от негибкости, которая иногда характеризует системы совещательных агентов ( Brooks 1990). Наконец, система может также представлять гетерогенный состав реактивных и совещательных агентов.
Среда
Чтобы проиллюстрировать эту схему, рассмотрим теперь модели и симуляторы на основе агентов, основанные на физическом подходе; последние обычно рассматривают агенты как частицы, которые одновременно подвержены и генерируют силы. В этом случае среда содержит законы, регулирующие эти влияния и соответствующие элементы моделируемой системы, которые не являются агентами (например, точки отсчета, которые генерируют силы притяжения / отталкивания). Именно окружающая среда определяет общую динамику, объединяя эффекты, которые влияют на каждого агента и применяют их в целом на дискретных временных шагах. В этом цикле он фиксирует все вышеперечисленные введенные обязанности, а роль агентов минимальна (согласно некоторым определениям их вообще не следует называть агентами)Helbing et al. 1997 , Balmer and Nagel 2006 ). В расположенных подходах АБМ агенты имеют более высокую степень автономии и контроля над своими действиями, поскольку они оценивают свое восприятие и выбирают свои действия в соответствии с их поведенческими спецификациями. Окружающая среда сохраняет очень важную роль, поскольку она обеспечивает агентов своим восприятием, которые генерируются в соответствии с текущей структурой системы и расположением в ней агентов. Социально-экономические модели и моделирование обеспечивают различные подходы к представлению моделируемой системы, но в целом аналогичны расположенным ПРО. В модели, описанной в Dosi et al. 2006например, отношения между агентами (представляющими фирмы) устанавливаются в результате двухэтапного процесса, в котором агенты выбирают своего партнера по взаимодействию между множеством возможных, которые предоставляются средой, которая управляет процессом «рекламы», посредством которых агенты получают взаимную осведомленность.
Взаимодействие агента
Взаимодействие является ключевым аспектом в ПРО. Существует множество определений для концепции агента, и большинство из них подчеркивают тот факт, что этот вид организации должен иметь возможность взаимодействовать со своей средой и с другими субъектами для решения проблем или просто достичь своих целей в соответствии с координацией, сотрудничеством или схемы конкуренции. Суть ПРО - это то, что глобальная динамика системы возникает из локального поведения и взаимодействия между составляющими его частями. Строго говоря, для какой-то ПРО, глобальная динамика - это всего лишь сумма локального поведения и взаимодействий, поэтому мы не можем всегда говорить о появляющемся поведении, когда говорим о ПРО. Однако предположения, лежащие в основе разработки модели взаимодействия (или выбор существующей для проектирования и реализации конкретного приложения), настолько важны, что они оказывают глубокое влияние на определение самих агентов (например, переводчик специфический язык, воспринимающий сигналы). Поэтому почти очевидно, что механизмы взаимодействия оказывают огромное влияние на моделирование, проектирование и разработку приложений на основе определенного вида ПРО, которые, в свою очередь, основаны на конкретной модели взаимодействия. Поэтому не удивительно, что значительная часть исследований, проведенных в области агентов, была сфокусирована на этом аспекте. Поэтому почти очевидно, что механизмы взаимодействия оказывают огромное влияние на моделирование, проектирование и разработку приложений на основе определенного вида ПРО, которые, в свою очередь, основаны на конкретной модели взаимодействия. Поэтому не удивительно, что значительная часть исследований, проведенных в области агентов, была сфокусирована на этом аспекте. Поэтому почти очевидно, что механизмы взаимодействия оказывают огромное влияние на моделирование, проектирование и разработку приложений на основе определенного вида ПРО, которые, в свою очередь, основаны на конкретной модели взаимодействия. Поэтому не удивительно, что значительная часть исследований, проведенных в области агентов, была сфокусирована на этом аспекте.
В этом разделе представлена ??концептуальная таксономия моделей известных в настоящее время / доступных агентов (см. рис. 3), пытаясь определить преимущества и проблемы, связанные с ними, как с концептуальной, так и с технической точки зрения.
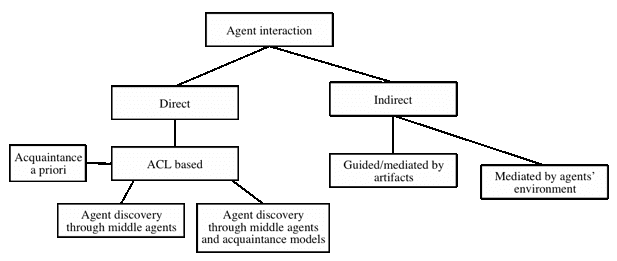
Рисунок 3 - Предложенная таксономия моделей взаимодействия агентов
Существует множество возможных аспектов и аспектов моделей взаимодействия агентов, которые могут быть выбраны и приняты для определения возможной таксономии.
Первый аспект, который рассматривается здесь для классификации моделей взаимодействия с агентами, связан с тем фактом, что агенты напрямую обмениваются сообщениями (например, обмениваются сообщениями), и, таким образом, модель не включает в себя абстракцию фактического канала связи, или есть некоторые медиа, вставленные между партнеров по коммуникации, которые явно включены в модель взаимодействия. Хотя прежний подход с конкретной ссылкой на модели языка коммуникаций с языком агентов (ACL) является наиболее широко используемым в области агента, он имеет свои недостатки; например, чтобы эффективно общаться, агенты должны «знать» друг друга, что означает, что они должны характеризоваться уникальным именем, обозначающим их в общей системе. Более того, они должны быть в состоянии знакомиться друг с другом, у них должен быть способ обнаружить имена других агентов в системе. Способ, с которым взаимодействуют модели взаимодействия агентов ACL, относится к другому аспекту таксономии, предоставляя прямыеаприорное знакомство между агентами, принятие агентов среднего звена для обнаружения информации и разработка более сложных моделей знакомства для решения вопросов, связанных с представлением и сопровождением информации для ознакомления, а также с надежностью и масштабируемостью инфраструктуры агента.
Тем не менее, существуют другие модели взаимодействия с агентами, обеспечивающие косвенную связь между ними. Некоторые из этих подходов обеспечивают создание и использование артефактов, представляющих медиа для взаимодействия агентов. Другие модели косвенного взаимодействия более сфокусированы на среде модельного агента как месте взаимодействия агентов, что, таким образом, влияет на взаимодействие и, следовательно, на поведение агентов.
Модели прямого взаимодействия
Первая и наиболее широко используемая модель взаимодействия с агентами обеспечивает прямой обмен информацией между партнерами по коммуникации. Этот подход игнорирует детали, связанные с каналом связи, который позволяет взаимодействовать, и не включает его как элемент абстрактной модели взаимодействия. Как правило, соответствующие механизмы обеспечивают протокол обмена сообщениями «точка-точка», регулирующий обмен сообщениями между агентами. Существуют различные аспекты коммуникативного акта, которые должны быть смоделированы (начиная от технических соображений низкого уровня от формата сообщений до концептуальных вопросов, связанных с формальной семантикой сообщений и разговоров), но в целом этот подход обеспечивает определение подходящих языков для охвата этих аспекты.
Интуитивно Язык общения с агентом (ACL) предоставляет агентам возможность обмена информацией и знаниями (см. Рис. 4). Это неопределенное определение по сути включает в себя аспект концепции термина «агент», который предполагает, что агент является интеллектуальным автономным субъектом, чьи функции включают в себя какие-то социальные способности ( Wooldridge and Jennings 1995 ). Согласно некоторым подходам, эта особенность является той, которая в конечном счете определяет сущность агентства ( Genesereth and Ketchpel 1994). Оставляя в стороне обсуждение определения и концепции агентства, этот раздел будет посвящен тому, что эффективно означает выражение «социальные способности». Для этого мы кратко сопоставим то, что эти ACL разделяют с теми подходами, которые позволяют обмен информацией между распределенными компонентами (например, в устаревших системах) в отношении определения канала связи, позволяющего надежный обмен сообщениями через компьютерную сеть (т. Е. более низкие аспекты коммуникации). Что отличает ACL от таких систем, являются объектами дискурса и их смысловой сложностью; в частности, есть два аспекта, которым не разрешены распределенные вычислительные протоколы и архитектуры:
- автономность взаимодействующих компонентов: компоненты современных систем (даже если они могут быть довольно сложными и могут считаться самодостаточными со ссылкой на предоставление конкретной услуги) имеют более низкую степень автономии, чем та, которая обычно связана с агентами;
- информация, передаваемая в сообщениях, обычно не требует комплексного онтологического подхода , поскольку структуры и категории могут рассматриваться как разделяемые компонентами системы.
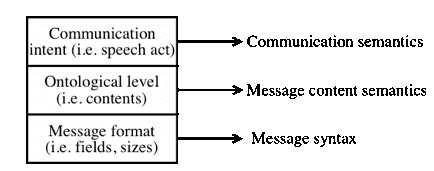
Рисунок 4 - Слои и проблемы языка общения с агентом
Что касается автономии, в то время как традиционные программные компоненты предлагают услуги и обычно выполняют требуемые действия в качестве реакции на внешние запросы, агенты могут решить не выполнять задачу, требуемую каким-либо другим объектом. Более того, агенты рассматриваются в целом как временно непрерывные и проактивные, в то время как это вообще не выполняется для общих компонентов программного обеспечения.
Что касается второго пункта, компоненты имеют определенные интерфейсы, которые предполагают согласие по набору общих структур данных. Семантика связанной информации и семантика сообщений / запросов / запросов услуг приведены в каком-то (более или менее формальном) языке моделирования, но тесно связаны с реализацией компонентов. Для взаимодействия с агентом необходимо указать более четкое и полное представление о концепциях домена. Чтобы иметь возможность эффективно обмениваться знаниями, агенты должны делиться онтологией (см., Например, Gruber 1995), то есть представление набора категорий объектов, понятий, сущностей, свойств и отношений между ними. Другими словами, одно и то же понятие, объект или сущность должно иметь единообразное значение и набор свойств по всей системе.
Модели косвенного взаимодействия
С технической точки зрения связь с агентом обычно является косвенной даже в моделях взаимодействия с прямым агентом. Фактически, большинство этих подходов используют какую-то коммуникационную инфраструктуру, обеспечивающую надежный сквозной механизм передачи сообщений. Тем не менее, принятие модели концептуально прямого взаимодействия с агентами несет в себе конкретные проблемы, которые были ранее введены. В остальной части этого раздела основное внимание уделяется моделям, обеспечивающим наличие промежуточного объекта, посредника (позволяющего и регулирующего) взаимодействия агента. Эта коммуникационная абстракция - это не просто детальность реализации на низком уровне, а первоклассная концепция модели.
Модели взаимодействия агентов, которые обеспечивают косвенные механизмы коммуникации, будут классифицированы в модели, опосредованные артефактом и пространственно обоснованные . Различие основано на вдохновении и метафоре, на которых основаны эти модели. Первые обеспечивают проектирование и реализацию артефакта, который эмулирует конкретные объекты среды агентов, целью которых является сообщение автономных объектов. Модели взаимодействия с пространственно обоснованными агентами доводят метафору среды модельного агента до крайности, признавая, что существуют ситуации, в которых пространственные характеристики и информация являются ключевым фактором, и при анализе и моделировании системы нельзя пренебрегать.
Оба этих подхода обеспечивают механизмы взаимодействия, которые сильно отличаются от обмена сообщениями между двумя точками. Фактически, среда, которая позволяет взаимодействию внутри себя, представляет собой контекстно- зависимую связь агента.
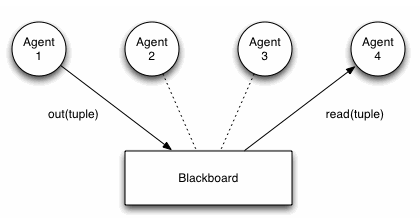
Рисунок 5 - Концептуальная схема для типичной архитектуры доски, в том числе два образца примитивов координационной модели Linda, то есть выход из кортежа в доску (out, выход) и неразрушающий вход агента от доски (read, вход)
В реальном мире ряд физических агентов взаимодействует с ресурсами совместного доступа, имея конкурентный доступ к ним (например, автомобили на улицах и перекрестках), но также сотрудничает для выполнения задач, которые не могут выполняться только отдельными субъектами из-за недостаточной компетенции или способности (например, люди, которые несут очень тяжелое бремя вместе). Очень часто, чтобы регулировать взаимодействия, связанные с этими ресурсами, мы строим конкретные артефакты, такие как светофоры на улицах, или аккуратно размещенные ручки на больших тяжелых ящиках. Используя эту метафору, некоторые подходы к взаимодействию с агентами имеют тенденцию моделировать и реализовывать абстракции, что позволяет взаимодействовать с объектами через общий ресурс, доступ которого регулируется в соответствии с точно определенными правилами. Архитектуры на основе Blackboard(см. рис. 5) являются первым примером такой модели. Доски - это общий репозиторий данных, который позволяет взаимодействующим программным модулям общаться непрямым и анонимным способом ( Englemore and Morgan 1988 ). В частности, понятие кортежа , впервые введенное в Linda ( Gelernter 1985 ), представляет собой повсеместную модификацию базовой модели доски.
Линда ( Gelernter, 1985 ), язык координации, вероятно, представляет собой наиболее подходящую модель на основе доски. Он основан на концепции пространства кортежей, которая представляет собой ассоциативную доску, позволяющую агентам делиться и извлекать данные (т. Е. Кортежи) через некоторый механизм сопоставления данных (например, сопоставление или унификация), встроенный в доску. Линда также указывает очень простой язык, определяющий механизмы доступа к кортежу.
Обоснование этого подхода состоит в том, чтобы как можно лучше отделить вычисления и координационные контексты ( Gelernter and Carriero 1992 ), предоставив конкретные абстракции для взаимодействия агентов. Что касается моделей прямого взаимодействия, то часть бремени координации фактически переносится от агента к инфраструктуре. Эволюция этого подхода в основном соответствовала двум направлениям: расширению языка координации и инфраструктуры с целью повышения его выразительности или удобства использования, а также моделирования и реализации распределенных пространств кортежей ( Picco et al., 1999 , Omicini and Zambonelli 1999 , Cabri 2000 ).
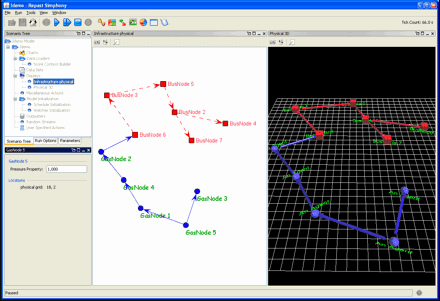
Рисунок 6 - Скриншот апплекса моделирования NetLogo, слева, и имитационной модели Repast, справа
Платформы для моделирования на основе агентов
Учитывая распространенную диффузию и принятие основанных на агентах подходов к моделированию и моделированию, неудивительно, что растет интерес к программным платформам, специально направленным на поддержку реализации симуляционных систем на основе агентов.
Такая структура часто обеспечивает абстракции и механизмы определения агентов и их среды для поддержки их взаимодействия, а также дополнительные функции, такие как управление имитацией (например, настройка, настройка, управление поворотами), ее визуализация, мониторинг и получение данных о моделируемой динамике. Цель этой статьи - не дать подробный обзор современного уровня техники в этом секторе, а скорее набросать некоторые классы инструментов, которые использовались для поддержки реализации симуляций на основе агентов и предоставления набора ссылок к соответствующим примерам платформ, облегчающих разработку симуляций на основе агентов.
Первая категория этих инструментов платформы обеспечивает универсальные рамки, в которых агенты в основном представляют собой пассивные абстракции, типы структур данных, которые управляются общим процессом моделирования. Важным примером таких инструментов является NetLogo (см. рис. 6), диалект языка логотипа, специально предназначенный для моделирования явлений, характеризующихся децентрализованным, взаимосвязанным характером. NetLogo даже не принимает термин агент для обозначения людей, но скорее называет их черепахами;типичное моделирование состоит в цикле, который выбирает и выполняет действие для каждой черепахи, учитывая ее текущую ситуацию и состояние. Следует отметить, что, учитывая некоторые из ранее упомянутых определений автономного агента, черепаха не должна считаться агентом из-за почти отсутствующей автономии этих сущностей. Выбор очень простого языка программирования, который не требует фона в информатике, возможность развертывания симуляций в виде апплетов Java очень простым способом и доступность простых, но эффективных инструментов визуализации, сделали NetLogo чрезвычайно популярным. Следует отметить, что существуют другие платформы и инструменты на основе языка логотипа (например, StarLogo, StarLogoT), но они не представляют существенных различий с точки зрения этой классификации.
Вторая категория платформ обеспечивает рамки, которые разрабатываются с аналогичным обоснованием, предоставляя очень похожие инструменты поддержки, но эти инструменты основаны на языках программирования общего назначения (как правило, объектно-ориентированных). Repast ( North et al., 2006)) (см. рис. 6) является успешным представителем этой категории, являясь широко используемой платформой моделирования на основе агентов на основе языка Java. Объектно-ориентированный характер базового языка программирования поддерживает определение вычислительных элементов, которые делают эти агенты более автономными, ближе к общим определениям агентов, поддерживая инкапсуляцию состояний (и механизмов манипулирования состояниями), действия и механизм выбора действий в агентах учебный класс. Выбор использования языка программирования общего назначения, с одной стороны, усложняет принятие этих инструментов для модельеров без учета информатики, а с другой стороны, упрощает интеграцию с внешними и существующими библиотеками. Repast в своей текущей версии может быть легко подключен к инструментам для статистического анализа, визуализации данных, отчетности, а также географических информационных систем. Хотя вышеупомянутые функциональные возможности, несомненно, важны для упрощения разработки эффективного симулятора, и даже если в принципе можно адаптировать рамки, принадлежащие ранее описанным категориям, следует отметить, что их нейтральность по отношению к конкретной принятой модели агента приводит к необходимой предварительной фазе адаптации платформы к конкретным особенностям модели, которая реализуется. Если последний определяет конкретные абстракции и механизмы для агентов, их действия по принятию решений, их окружение и способ их взаимодействия, тогда модельер должен в целом разработать правильную вычислительную поддержку, чтобы иметь возможность плодотворно использовать платформу. Эти платформы, по сути, не обеспечены конкретными опорами для реализации механизмов обсуждения агентов или инфраструктур для моделей взаимодействия, как прямых, так и косвенных (даже если необходимо отметить, что все вышеперечисленные платформы обычно предоставляют некоторую форму поддержки определения среды агента, например grid- или графовые структуры). Как и в предыдущем случае, в эту категорию можно классифицировать несколько дополнительных фреймворков, начиная с ориентированной на Objective-C структуры Swarm (Minar et al. 1996 ), который, вероятно, является предком всех других членов этой категории, на основе Java Ascape ( Parker 2001 ) и Mason ( Luke et al., 2003 ). Все эти проекты имеют одно и то же обоснование, даже если они различаются по языку платформы / программирования, на котором они основаны и подробно описаны некоторые технические / исполнительные уровни.
Третья категория платформ представляет собой попытку предоставить лингвистическую поддержку более высокого уровня, пытаясь уменьшить расстояние между агентами и их реализациями. Например, последняя версия Repast характеризуется наличием интерфейса высокого уровня для определения типа поведения агента, который основан на наборе примитивов для определения действий агента. SimSesam ( Klugl et al., 2003 ) определяет набор примитивных функций в качестве основных элементов для описания поведения агентов, а также предоставляет визуальные инструменты, поддерживающие реализацию модели.
На крайней границе этой категории мы можем упомянуть об усилиях, которые специально направлены на поддержку разработки симуляций на основе точной модели агента, подхода, а иногда и для конкретной области применения, такой как описанная в ( Weyns et al. 2006 , Bandini et al., 2007 ).
Будущие направления
Агентное моделирование и моделирование - относительно молодой, но уже широко распространенный подход к анализу, моделированию и моделированию сложных систем. Неоднородность подходов, стилей моделирования и приложений, которые легитимно утверждают, что они основаны на «агентах», а также тот факт, что различные дисциплины участвуют в соответствующих исследовательских усилиях, являются всеми факторами, которые препятствуют определению общепризнанного представления о поле. Было бы желательно создать более высокий уровень такой активности, чтобы связать различные усилия с помощью общей схемы. Более того, он может представлять собой первый шаг к эффективному решению некоторых эпистемологических вопросов, связанных с этим подходом к моделированию и анализу сложных систем.
Список использованной литературы
- Тарасов В.Б. От многоагентных систем к интеллектуальным организациям: философия, психология, информатика.- М.: “Едиториал УРСС”, 2002. -352 с.
- ALFI, V., Galla, T., Marsili, M., Pietronero, L., eds.: Interacting Agents, Complexity and Inter-Disciplinary Applications (IACIA). (2007)
- ARENTZE, T., Timmermans, H.J.P.: A Multiagent Model of Negotiation Processes Between Multiple Actors in Urban Developments: a Framework for and Results of Numerical Experiments. Environment and Planning B 30 (2003) 391-410.
- BALMER, M., Nagel, K.: Shape Morphing of Intersection Layouts Using Curb Side Oriented Driver Simulation. In van Leeuwen, J.P., Timmermans, H.J., eds.: Innovations in Design & Decision Support Systems in Architecture and Urban Planning, Springer-Verlag (2006) 167-183
- BANDINI, S., Manzoni, S., Simone, C.: Heterogeneous Agents Situated in Heterogeneous Spaces. Applied Artificial Intelligence 16 (2002) 831-852
- BANDINI, S., Manzoni, S., Vizzari, G.: Situated Cellular Agents: a Model to Simulate Crowding Dynamics. IEICE Transactions on Information and Systems: Special Issues on Cellular Automata E87-D (2004) 669-676
- BANDINI, S., Petta, P., Vizzari, G., eds.: International Symposium on Agent Based Modeling and Simulation (ABModSim 2006). Volume Cybernetics and Systems 2006., Austrian Society for Cybernetic Studies (2006) 18th European Meeting on Cybernetics and Systems Research (EMCSR 2006).
- BANDINI, S., Celada, F., Manzoni, S., Puzone, R., Vizzari, G.: Modelling the Immune System with Situated Agents. In Apolloni, B., Marinaro, M., Nicosia, G., Tagliaferri, R., eds.: Proceedings of WIRN/NAIS 2005. Volume 3931 of Lecture Notes in Computer Science., Springer-Verlag (2006) 231-243
- BANDINI, S., Federici, M.L., Vizzari, G.: Situated Cellular Agents Approach to Crowd Modeling and Simulation. Cybernetics and Systems 38 (2007) 729-753
- BANDINI, S., Petta, P., Vizzari, G., eds.: Second International Symposium on Agent Based Modeling and Simulation (ABModSim 2008). Volume Cybernetics and Systems 2008., Austrian Society for Cybernetic Studies (2008) 19th European Meeting on Cybernetics and Systems Research (EMCSR 2008).
- BAR-YAM, Y.: Dynamics of Complex Systems. Addison Wesley, Reading, MA (1997)
- BATTY, M.: Agent Based Pedestrian Modeling (editorial). Environment and Planning B: Planning and Design 28 (2001) 321-326
- BAZZAN, A.L.C., Wahle, J., Klugl, F.: Agents in Traffic Modelling—from Reactive to Social Behavior. In Burgard, W., Christaller, T., Cremers, A.B., eds.: KI-99: Advances in Artificial Intelligence, 23rd Annual German Conference on Artificial Intelligence, Bonn, Germany, September 13-15, 1999, Proceedings. Volume 1701 of Lecture Notes in Computer Science., Springer-Verlar (1999) 303-306
- BROOKS, R.A.: A Robust Layered Control System for a Mobile Robot. IEEE Journal of Robotics and Automation 2 (1986) 14-23
- BROOKS, R.A.: Elephants Don't Play Chess. Robotics and Autonomous Systems 6 (1990) 3-15
- BRUECKNER, S.: An Analytic Approach to Pheromone-Based Coordination. In: ICMAS, IEEE Computer Society (2000) 369-370
- CABRI, G., Leonardi, L., Zambonelli, F.: Mars: a Programmable Coordination Architecture for Mobile Agents. IEEE Internet Computing 4 (2000) 26-35
- DAVIDSSON, P., Logan, B., Takadama, K., eds.: Multi-Agent and Multi-Agent-Based Simulation, Joint Workshop MABS 2004, New York, NY, USA, July 19, 2004, Revised Selected Papers. In Davidsson, P., Logan, B., Takadama, K., eds.: Multi-Agent-Based Simulation. Volume 3415 of Lecture Notes in Computer Science., Springer-Verlag (2005)
- DOSI, G., Fagiolo, G., Roventini, A.: An Evolutionary Model of Endogenous Business Cycles. Computational Economics 27 (2006) 3-34
- EDMONDS, B.: The Use of Models—Making MABS More Informative. In: Multi-Agent-Based Simulation, Second International Workshop, MABS 2000, Boston, MA, USA, July, 2000, Revised and Additional Papers. Volume 1979 of Lecture Notes in Computer Science., Springer-Verlag (2001) 15-32.
- ENGLEMORE, R.S., Morgan, T., eds.: Blackboard Systems. Addison-Wesley (1988)
- EPSTEIN, J.M.: Agent-Based Computational Models and Generative Social Science. Complexity 4 (1999) 41-60
- FERBER, J.: Multi-Agent Systems. Addison-Wesley (1999)
- FRANKLIN, S., Graesser, A.: Is It an Agent, or Just a Program? : A Taxonomy for Autonomous Agents. In Muller, J.P., Wooldridge, M., Jennings, N.R., eds.: Intelligent Agents III, Agent Theories, Architectures, and Languages, ECAI '96 Workshop (ATAL), Budapest, Hungary, August 12-13, 1996, Proceedings. Volume 1193 of Lecture Notes in Computer Science., Springer-Verlag (1997) 21-36
- GELERNTER, D.: Generative Communication in Linda. ACM Trans. Program. Lang. Syst. 7 (1985) 80-112
- GELERNTER, D., Carriero, N.: Coordination Languages and their Significance. Communications of the ACM 35 (1992) 97-107
- GENESERETH, M.R., Nilsson, N.: Logical Foundations of Artificial Intelligence. Morgan Kaufmann Publishers (1987)
- GENESERETH, M.R., Ketchpel, S.P.: Software Agents. Communications of the ACM 37 (1994) 48-ff.
- GILBERT, N., Troitzsch, K.G.: Simulation for the Social Scientist (second edition). Open University Press (2005).
- GRUBER, T.R.: Toward Principles for the Design of Ontologies Used for Knowledge Sharing. International Journal of Human-Computer Studies 43 (1995) 907-928
- HALES, D., Edmonds, B., Norling, E., Rouchier, J., eds.: Multi-Agent-Based Simulation III, 4th International Workshop, MABS 2003, Melbourne, Australia, July 14th, 2003, Revised Papers. In Hales, D., Edmonds, B., Norling, E., Rouchier, J., eds.: Multi-Agent-Based Simulation. Volume 2927 of Lecture Notes in Computer Science., Springer-Verlag (2003)
- HASSAS, S., Serugendo, G.D.M., Phan, D., eds.: Multi-Agents for modelling Complex Systems (MA4CS). (2007)
- HELBING, D., Schweitzer, F., Keltsch, J., Molnar, P.: Active Walker Model for the Formation of Human and Animal Trail Systems. Physical Review E 56 (1997) 2527-2539
- HENEIN, C.M., White, T.: Agent-Based Modelling of Forces in Crowds. In Davidsson, P., Logan, B., Takadama, K., eds.: Multi-Agent and Multi-Agent-Based Simulation, Joint Workshop MABS 2004, New York, NY, USA, July 19, 2004, Revised Selected Papers. Volume 3415 of Lecture Notes in Computer Science., Springer-Verlag (2005) 173-184
- KLUGL, F., Herrler, R., Oechslein, C.: From Simulated to Real Environments: How to Use SeSam for Software Development. In Schillo, M., Klusch, M., Muller, J.P., Tianfield, H., eds.: MATES. Volume 2831 of Lecture Notes in Computer Science., Springer (2003) 13-24
- LANE, D.A.: Artificial Worlds and Economics, part I. Journal of Evolutionary Economics 3 (1993a) 89-107
- LANE, D.A.: Artificial Worlds and Economics, part II. Journal of Evolutionary Economics 3 (1993b) 177-197
- LUCK, M., McBurney, P., Sheory, O., Willmott, S., eds.: Agent Technology: Computing as Interaction. University of Southampton (2005)
- LUKE, S., Balan, G.C., Panait, L.A., Cioffi-Revilla, C., Paus, S.: Mason: a Java Multi-Agent Simulation Library. In: Proceedings of Agent 2003 Conference on Challenges in Social Simulation. (2003)
- MAMEI, M., Zambonelli, F., Leonardi, L.: Co-fields: Towards a Unifying Approach to the Engineering of Swarm Intelligent Systems. In: Engineering Societies in the Agents World III: Third International Workshop (ESAW2002). Volume 2577 of Lecture Notes in Artificial Intelligence., Springer-Verlag (2002) 68-81
- MINAR, N., Burkhart, R., Langton, C., Askenazi, M.: The Swarm Simulation System: A Toolkit for Building Multi-Agent Simulations. Working Paper 96-06-042, Santa Fe Institute (1996)
- MOSS, S., Davidsson, P., eds.: Multi-Agent-Based Simulation, Second International Workshop, MABS 2000, Boston, MA, USA, July, 2000, Revised and Additional Papers. Volume 1979 of Lecture Notes in Computer Science., Springer-Verlag (2001)
- NORTH, M.J., Collier, N.T., Vos, J.R.: Experiences Creating Three Implementations of the Repast Agent Modeling Toolkit. ACM Transactions on Modeling and Computer Simulation 16 (2006) 1-25
- OMICINI, A., Zambonelli, F.: Coordination for Internet application development. Autonomous Agents and Multi-Agent Systems 2 (1999) 251-269 Special Issue: Coordination Mechanisms for Web Agents.
- PARKER, M.T.: What is Ascape and Why Should You Care? Journal of Artificial Societies and Social Simulation 4 (2001) 5 http://jasss.soc.surrey.ac.uk/4/1/5.html.
- PICCO, G.P., Murphy, A.L., Roman, G.C.: Lime: Linda Meets Mobility. In: Proceedings of the 21st International Conference on Software Engineering (ICSE99), ACM press (1999) 368-377
- PYKA, A., Fagiolo, G.: Agent-Based Modelling: A Methodology for Neo-Schumpeterian Economics. In: The Elgar Companion to Neo-Schumpeterian Economics. Edward Elgar ((in press))
- RAO, A., Georgeff, M.: Modeling Rational Agents within a BDI-Architecture. In: Proc. Of Knowledge Representation and Reasoning (KR&R 1991). (1991)
- RAO, A., Georgeff, M.: BDI Agents: from Theory to Practice. In: Proceedings of the International Conference on Multi-Agent Systems. (1995)
- RUSSEL, S., Norvig, P.: Artificial Intelligence: A Modern Approach. Prentice Hall, Upper Saddle River, NJ (1995)
- SCHADSCHNEIDER, A., Kirchner, A., Nishinari, K.: CA Approach to Collective Phenomena in Pedestrian Dynamics. In Bandini, S., Chopard, B., Tomassini, M., eds.: Cellular Automata, 5th International Conference on Cellular Automata for Research and Industry, ACRI 2002. Volume 2493 of Lecture Notes in Computer Science., Springer (2002) 239-248
- SICHMAN, J.S., Conte, R., Gilbert, N., eds.: Multi-Agent Systems and Agent-Based Simulation. In Sichman, J.S., Conte, R., Gilbert, N., eds.: Multi-Agent-Based Simulation. Volume 1534 of Lecture Notes in Computer Science., Springer-Verlag (1998)
- SICHMAN, J.S., Bousquet, F., Davidsson, P., eds.: Multi-Agent-Based Simulation, Third International Workshop, MABS 2002, Bologna, Italy, July 15-16, 2002, Revised Papers. In Sichman, J.S., Bousquet, F., Davidsson, P., eds.: Multi-Agent-Based Simulation. Volume 2581 of Lecture Notes in Computer Science., Springer-Verlag (2003)
- SICHMAN, J.S., Antunes, L., eds.: Multi-Agent-Based Simulation VI, International Workshop, MABS 2005, Utrecht, The Netherlands, July 25, 2005, Revised and Invited Papers. In Sichman, J.S., Antunes, L., eds.: Multi-Agent-Based Simulation. Volume 3891 of Lecture Notes in Computer Science., Springer (2006)
- TUMMOLINI, L., Castelfranchi, C., Ricci, A., Viroli, M., Omicini, A.: "Exhibitionists" and "Voyeurs" Do it Better: A Shared Environment Approach for Flexible Coordination with Tacit Messages. In Weyns, D., Parunak, H.V.D., Michel, F., eds.: 1st International Workshop on "Environments for MultiAgent Systems" (E4MAS 2004). (2004) 97-111
- WAHLE, J., Schreckenberg, M.: A Multi-Agent System for On-Line Simulations Based on Real-World Traffic Data. In: Annual Hawaii International Conference on System Sciences (HICSS-34), IEEE Computer Society (2001)
- WEYNS, D., Schelfthout, K., Holvoet, T., Lefever, T.: Decentralized Control of e'gv transportation systems. In: AAMAS Industrial Applications, ACM Press (2005) 67-74
- WEYNS, D., Boucke, N., Holvoet, T.: Gradient Field-Based Task Assignment in an AGV Transportation System. In: AAMAS '06: Proceedings of the fifth international joint conference on Autonomous agents and multiagent systems, ACM Press (2006) 842-849
- WEYNS, D., Holvoet, T.: From Reactive Robots to Situated Multi-Agent Systems: a Historical Perspective on the Role of Environment in Multi-Agent Systems. In Dikenelli, O., Gleizes, M.P., Ricci, A., eds.: Engineering Societies in the Agents World VI, 6th International Workshop, ESAW 2005. Volume 3963 of Lecture Notes in Computer Science., Springer-Verlag (2006) 63-88
- WEYNS, D., Breuckner, S., Demazeau, Y., eds.: Engineering Environment-Mediated Multiagent Systems (EEMMAS). (2007)
- WEYNS, D., Omicini, A., Odell, J.: Environment as a First Class Abstraction in Multiagent Systems. Autonomous Agents and Multi-Agent Systems 14 (2007) 5-30
- WINDRUM, Paul, Fagiolo, Giorgio and Moneta, Alessio (2007). 'Empirical Validation of Agent-Based Models: Alternatives and Prospects'. Journal of Artificial Societies and Social Simulation 10(2)8 http://jasss.soc.surrey.ac.uk/10/2/8.html.) .
- WOOLDRIDGE, M.J., Jennings, N.R.: Intelligent agents: Theory and Practice. The Knowledge Engineering Review 10 (1995) 115-152
- ZAMBONELLI, F., Parunak, H.V.D.: Signs of a Revolution in Computer Science and Software Engineering. In Paolo Petta, Robert Tolksdorf, Franco Zambonelli (Eds.): Engineering Societies in the Agents World III, Third International Workshop, ESAW 2002, Madrid, Spain, September 16-17, 2002, Revised Papers. Volume 2577 of Lecture Notes in Computer Science, Springer-Verlag (2003) 13-28.