Аннотация
Новаковский Б.А., Пермяков Р.В. Цифровая наземная стереосъемка: возможности и перспективы Представлена методика выполнения наземной стереосъемки с помощью цифровой камеры и обработки полученных материалов средствами цифровых фотограмметрических технологий. Методика опробована на примере алмазных карьеров Якутии.
Основной материал статьи
В последние десятилетия динамичное развитие науки и техники не только привело к замене аналоговых устройств фотограмметрической обработки снимков цифровыми системами, но и сформировало новые требования к технологии самой съемки. В условиях суровой зимы, свойственной полярным широтам Якутии, маркшейдеры Российской государственной горнорудной компании АЛРОСА
, на долю которой приходится четверть годовой мировой добычи алмазов, заинтересованы в более эффективной организации наземной стереосъемки карьеров и обработке ее результатов..
Наземная стереосъемка – это комплекс работ, связанных с фотографированием объектов земной поверхности с наземных базисов, составлением планов местности по стереопарам полученных фотоснимков и определением пространственных координат заданных точек. Традиционный подход к наземной стереосъемке основан на использовании различных по своей конструкции фототеодолитов – приборов, сочетающих в себе возможности угловых измерений и фотографирования. Фототеодолит состоит из фотокамеры и теодолита и служит для фотографирования местности при заданных значениях угловых элементов внешнего ориентирования, а также для измерения горизонтальных и вертикальных углов с целью определения дирекционного угла и длины базиса. Это означает, что элементы внешнего ориентирования фототеодолитных снимков известны с заданной точностью [1].
В рамках нашего исследования мы решили отойти от традиционной фототеодолитной съемки, заменив фототеодолит цифровой камерой. Таким образом, с одной стороны, решался вопрос оптимизации съемочного процесса, а с другой – увеличивалась производительность при обработке его результатов. В отличие от аналоговых снимков, получаемых с помощью фототеодолита и в связи с этим требующих дополнительных затрат на проявку и сканирование, цифровые снимки, полученные цифровой камерой, можно непосредственно использовать для обработки в цифровой фотограмметрической системе (ЦФС).
ЦФС представляет собой набор программно-аппаратных средств по обработке материалов дистанционного зондирования. Программный комплекс фотограмметрической системы позволяет работать в стереорежиме с использованием специальных инструментов: зеркальных и высокочастотных 3D-мониторов; анаглифических, затворных и поляризационных очков [2]. Кроме того, ЦФС позволяет успешно обрабатывать снимки, элементы внешнего ориентирования которых неизвестны. Для их определения необходимо знать длину базиса съемки и координаты опорных точек в пространстве снимаемого объекта.
В число ключевых задач, решаемых маркшейдерами средствами фотограмметрии, входят мониторинг открытой разработки карьеров и подсчет объемов извлеченной породы. Для тестирования возможностей решения этих же задач с помощью фотограмметрической обработки цифровых снимков были выбраны участки в карьерах Удачный
и Зарница
.
Карьер Удачный
– крупнейшее по объемам сырья и размерам рудного тела месторождение алмазов в России. Проектная глубина карьера – 630 м [3]. Стереопара снимков карьера получена цифровой камерой Canon EOS 5D Mark III с разрешением матрицы 22,1 мегапикселя (рис. 1). Камера устанавливалась на штативе над двумя станциями с известными координатами. На основе координат опорных точек в пространстве снимаемого объекта можно рассчитать длину базиса съемки. Точки съемки выбраны из соображений охвата на изображениях максимального количества опознавательных знаков с известными плановыми и высотными координатами.
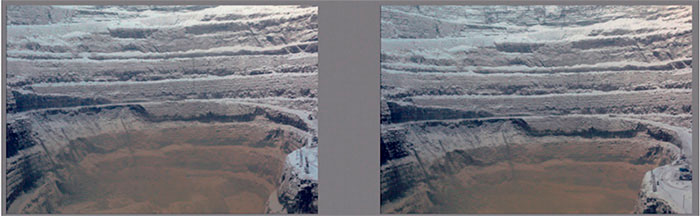
Рисунок 1 – Стереопара карьера Удачный
Обработка стереопары реализована средствами ЦФС PHOTOMOD 5.24. Данный продукт – отечественная разработка, используемая более чем в 70 странах мира. PHOTOMOD представляет собой полнофункциональную фотограмметрическую систему с большим набором возможностей и оригинальным графическим интерфейсом. К достоинствам системы относится замкнутый технологический цикл получения всех видов конечной продукции: ЦМР; ЗDвекторов; ортофотопланов и цифровых карт. Значительная часть фотограмметрических процессов автоматизирована, а благодаря возможностям распределенной обработки по сети скорость их выполнения для крупных проектов может быть увеличена путем использования большего числа процессоров. PHOTOMOD имеет гибкую модульную структуру, обеспечивающую оптимальное соответствие конфигурации задачам пользователя, поддерживает большое количество систем координат и обеспечивает контроль качества на всех стадиях технологического процесса [4].
Апробирование предложенной нами методики выполнено в условной правой декартовой системе координат. Для снимков сделана радиометрическая коррекция – устранение варьирования в значениях пикселей с целью улучшения визуальной дешифрируемости объектов. Для формирования стереопары, пригодной для стереоизмерений, необходимо было выполнить ряд обязательных процедур: внутреннее, взаимное и внешнее ориентирование снимков стереопары. Перед съемкой камера прошла калибровку в Московском государственном университете геодезии и картографии. Таким образом были уточнены координаты главной точки снимков, величина фокусного расстояния камеры, а также коэффициенты дисторсии.
Взаимное ориентирование снимков выполнялось в несколько этапов. Сначала путем визуального сопоставления был подобран параметр начального приближения изображений – взаимное перекрытие 95%. Затем путем ручных измерений установлен размер области поиска соответственной точки – 500 пикселей. Он определяется как максимальное расстояние в пикселах между идентичными точками на соседних снимках и служит для ограничения области, в которой коррелятор будет их искать. В результате автоматического измерения равномерно по всем частям изображений идентифицировано 85 связующих точек.
Для внешнего ориентирования использованы координаты опорных точек, расположенных на разных горизонтах карьера. Уравнивание стереопары реализовано с учетом данных о базисе съемки. В процессе уравнивания использовался итерационный подход, суть которого заключается в последовательном увеличении точности при переходе от уравнивания в свободной модели (без учета координат опорных точек) к методу независимых стереопар и методу связок. Точность уравнивания по среднему квадратическому отклонению (СКО) составила 15 мм в плане и 11 мм по высоте. Очевидно, что с увеличением числа опорных точек точность уравнивания будет повышаться.
По сформированной таким образом стереопаре можно проводить различные измерения и стереовекторизацию. Особенностью технологии обработки изображений, полученных в результате наземной съемки в ЦФС PHOTOMOD, – разворот осей системы координат. Если при классической аэрофотосъемке на наблюдателя перед стереоэкраном будет направлена ось Z, то при наземной съемке на него будет направлена ось X (в случае правой системы координат) (рис. 2). Чтобы адаптировать движение маркера в такой системе координат, в PHOTOMOD активирована функция перемещения маркера не в геодезических, а в пиксельных координатах.
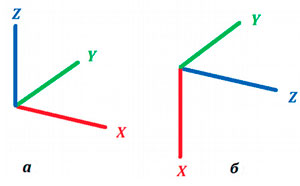
Рисунок 2 – Направления координатных осей в PHOTOMOD:
а – аэросъемка; б – наземная съемка
После этого в стереорежиме были отрисованы структурные линии – бровки карьера на различных горизонтах. Кроме того, периодически фиксируя положение маркера по координате Z, удалось с заданным шагом вручную провести ряд горизонталей. Модификация технологии обработки затронула и автоматический расчет пикетов. В рамках классической обработки аэрофото- и космической съемки коррелятор ЦФС PHOTOMOD позволяет автоматически и с заданным шагом определять высотное положение точек стереопары. В результате значительно сокращается время на ручную стереовекторизацию снимков оператором. Однако для стереопары изображений, полученных в результате наземной съемки, из-за разворота осей системы координат автоматический расчет пикетов выполняется некорректно. В связи с этим решено искусственно развернуть оси системы координат таким образом, чтобы ось Z была направлена на наблюдателя (см. рис. 2).
Для этого были скорректированы планово-высотные координаты опорных точек и заново выполнено уравнивание снимков стереопары: координаты X заменены на координаты Z, а координаты Z на координаты X с обратным знаком. На основе уравненной стереопары с исправленными значениями координат опорных точек произведен автоматический расчет пикетов (шаг сетки 1м) с последующей фильтрацией ошибочно измеренных точек.
После импорта пикетов и отрисованных структурных линий построена TIN-модель (рис. 3), ЦМР (с размером ячейки 1 м) и ортофотоизображение карьера. Для наглядного представления результатов моделирования полученная ЦМР экспортирована в формат . dem и средствами 3D- MOD (модуля трехмерного моделирования ЦФС PHOTOMOD) текстурирована ортоизображением карьера (рис. 4).
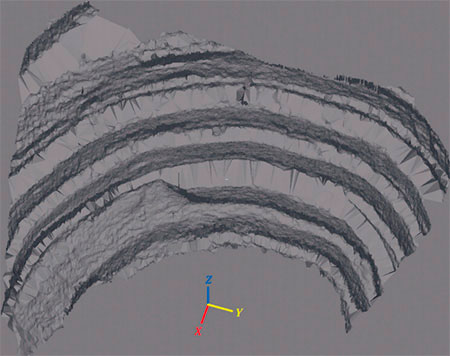
Рисунок 3 – TIN-модель карьера Удачный
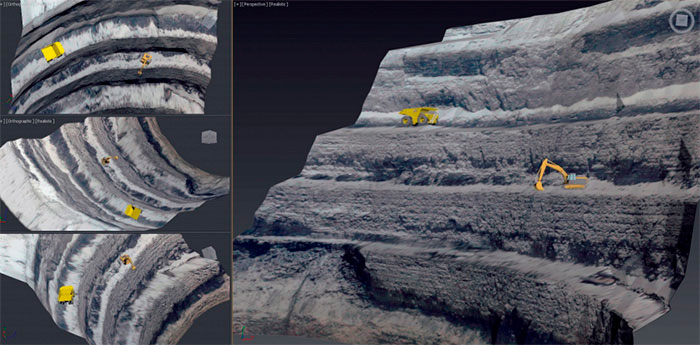
Рисунок 4 – Текстурированная 3D-модель карьера Удачный
По схожей методике проведена съемка и фотограмметрическая обработка стереопары снимков на тестовый участок в карьере «Зарница» (рис. 5). Кимберлитовая трубка этого карьера – первое открытое в СССР коренное месторождение алмазов. В настоящее время объем годовой переработки горной массы составляет здесь 1 млн т [3].

Рисунок 5 – Стереопара карьера Зарница
Точность уравнивания снимков стереопары по опорным точкам составила 1 мм в плане и 4 мм по высоте. Особенностью карьера на момент съемки стало наличие снежного покрова, который осложнил процесс автоматического измерения пикетов из-за низкого коэффициента корреляции между соседними пикселами изображения. В связи с этим для карьера Зарница
в стереорежиме были отрисованы только структурные линии – бровки различных горизонтов, послужившие основой для создания TIN-модели и ЦМР. Визуализация модели в трехмерном пространстве реализована в модуле 3D-MOD. Для верификации результатов моделирования использовались структурные линии, оцифрованные по стереопаре аналоговых снимков с помощью аналитической фотограмметрической системы (АФС) Стереоанаграф
, созданной НПП Геосистема
. Как видно из рис. 6, они практически полностью совпадают с бровками карьера, отрисованными в стереорежиме ЦФС PHOTOMOD.
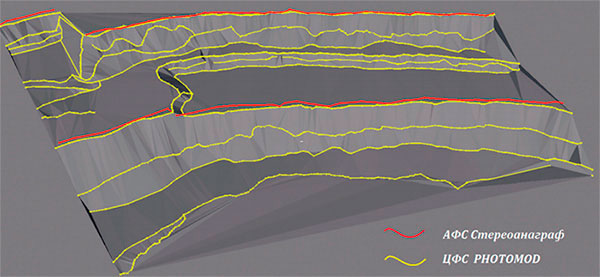
Рисунок 6 – Структурные линии карьера Зарница
, полученные АФС Стереоанаграф и ЦФС PHOTOMOD
В настоящее время наметилась уверенная тенденция перехода от традиционной наземной стереосъемки, аналоговых и аналитических методов обработки съемочных материалов к цифровым. Результатами фотограмметрической обработки цифровых стереопар могут быть оцифрованные в стереорежиме структурные линии, TIN-модели, ЦМР, текстурированные 3D-модели и др. Цифровая фотограмметрическая система PHOTOMOD (ЗАО Фирма Ракурс
) предоставляет широкие теоретические и практические возможности решения таких задач и открывает дальнейшие перспективы развития цифровой наземной стереосъемки.
Список использованной литературы
1. Лобанов А. Н. Фотограмметрия: Учебник для вузов. – М.: Недра, 1984. – 552 с.
2. Новаковский Б. А., Прасолова А. И., Волкова И. С., Пермяков Р. В. Геоинформационное обеспечение моделирования рельефа с использованием цифровых фотограмметрических станций // Геоинформатика. – 2011. – № 4. – С. 42.
3. Официальный сайт АК «АЛРОСА» — www.alrosa.ru/corporate-structure/.
4. Программные решения в области геоинформатики, цифровой фотограмметрии и дистанционного зондирования. Официальный сайт компании Ракурс
— www. racurs.ru.