Сравнительная характеристика способов частотного регулирования асинхронного электропривода
Авторы: В. И. Калашников, В. Г. Черников, А. А. Горбунов
Источник: Вестник ДонНТУ, 2020 г.
Аннотация
Приведен сравнительный анализ способов частотного регулирования/управления асинхронного короткозамкнутого двигателя без датчика скорости для основных способов: U/f с линейной характеристикой, U/f с контролем тока намагничивания (FCC) и векторное регулирование без датчика скорости. Показана целесообразность применения векторного регулирования без датчика скорости в диапазоне 10:1.
Постановка проблемы
Частотно-регулируемый электропривод в настоящее время является основным типом регулируемого привода во всех отраслях промышленности. Различают скалярное и векторное регулирования скорости асинхронного привода. При скалярном управлении формируются гармонические токи двигателя [1]. Векторное регулирование – это метод управления электрическими машинами переменного тока с вращающимся магнитным полем, формирующий гармонические токи (напряжения) фаз и обеспечивающий управление магнитным потоком ротора (моментом на валу двигателя) [2]. На практике наиболее часто применяются частотно-регулируемые асинхронные двигатели с короткозамкнутым ротором без датчика скорости.
Особенностью асинхронного двигателя является то, что его параметры одной и той же мощности, одного и того же производителя существенно отличаются [3]. Это обстоятельство требует автоматическою определения параметров привода конкретного двигателя. Для выбора системы регулирования представляет интерес сравнить различные способы частотного/регулирования/управления двигателя и показать различие в определении параметров двигателя по его паспортным данным и по результатам автоматической настройки.
Анализ последних исследований и публикации
В технической литературе достаточно подробно рассмотрены способы частотного регулирования асинхронного привода без датчика скорости, однако отсутствует анализ механических характеристик асинхронного привода для одного и того же двигателя при различных способах частотного управления в широком диапазоне изменения скорости [4]. Известно, что параметры асинхронного двигателя одной и тон же мощности одного и того же производителя отличаются от аналогичных параметров, рассчитанных по паспортным данным [5]. Однако отсутствует количественный анализ такого различия в определении параметров конкретного двигателя.
Цель (задачи) исследования
Целью данной работы является проведение сравнительного анализы механических и скоростных характеристик при различных способах регулирования/управления скорости, а также анализ отклонения параметров двигателя, определенных по паспортным данным и в результате автоматической настройки.
Основной материал исследования
Современный электропривод с микропроцессорной системой регулирования позволяют, во-первых, быстро и удобно проводить определение параметров привода, а также запоминать в виде файла все параметры, во-вторых – активизировать, подпрограммы самонастройки привода, которые в автоматическом режиме помогают пользователю (инженеру наладчику) подобрать необходимые параметры регуляторов, в-третьих вносить необходимые изменения в систему регулирования, адаптируя ей к конкретной технологической задаче [6].
Удобство параметрирования и настройки современных электроприводов с помощью персонального компьютера обеспечивается современными программными пакетами, которые позволяют иметь оперативный доступ к любому параметру привода, а также получить в цифровом виде осциллограммы переходных процессов для того, чтобы можно было оценить качество настройки системы регулирования. Например, для приводов поколения SINAMICS таким программным пакетом является программа STARTER.
Для проведения исследования частотно-регулируемых электроприводов был создан стенд, структурная схема которого приведена на рис. 1.
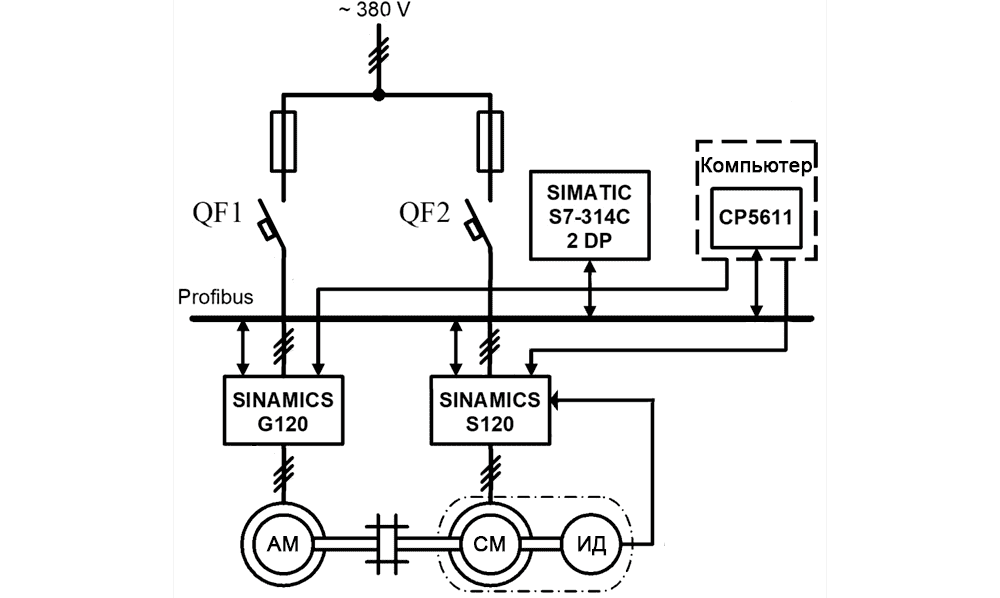
Рисунок 1 – Структурная схема экспериментального стенда
В основе стенда лежит спарка двух электрических машин, асинхронной машины с короткозамкнутым ротором и синхронной машины с постоянными магнитами, установленных на одном валу, каждая из которых подключена к собственному преобразователю частоты. При такой конструкции исследуемая машина может быть нагружена регулируемым моментом посредством нагрузочной машины.
Экспериментальный стенд для исследования режимов работы современных приводов переменного тока состоит из следующих частей:
- QF1, QF2 – автоматические выключатели;
- Simatic S7-314C 2DP – программируемый логический контроллер серии S7-300 с возможностью подключения децентрализованной периферии;
- Компьютер, выступающий в качестве программатора;
- CP 5611 – коммуникационный процессор для программирования логического контроллера и приводов переменного тока;
- привод Sinamics G120;
- привод Sinamics S120;
- АМ – асинхронный двигатель;
- СМ – синхронный двигатель;
- ИД – импульсный датчик;
- Profibus – промышленная информационная сеть для коммуникации компьютера, программируемого логического контроллера и приводов.
Исследуемый асинхронный двигатель имеет следующие данные: номинальная мощность PN = 0,75 кВт, номинальное напряжение USN = 380 В, номинальный ток ISN = 2,12 А, коэффициент мощности cosφN = 0,8, номинальная частота статора fSN = 50 Гц, номинальная скорость вращения вала двигателя nN = 1395 об/мин. В литературе приведена методика расчёта параметров Г-образной схемы замещения асинхронного двигателя с короткозамкнутым ротором (рис. 2) на основе паспортных данных
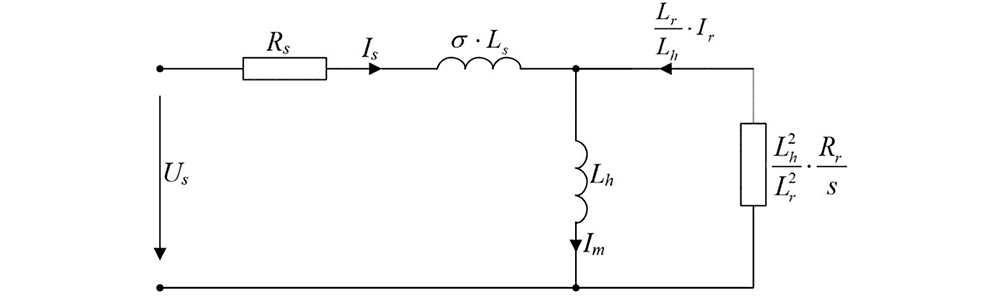
Рисунок 2 – Г-образная схема замещения асинхронной машины с короткозамкнутым ротором
Потокообразующая компонента вектора тока статора в номинальном режиме определяется по формуле:

Моментообразующая компонента вектора тока статора в номинальном режиме рассчитывается по формуле:
Абсолютное скольжение определяется по формуле:

Постоянная времени ротора определяется по формуле:
Индуктивное сопротивление рассеяния рассчитывается по формуле:

Индуктивное сопротивление главного контура намагничивания определяется по формуле:
Активное сопротивление статора определяется по формуле:
Коэффициент рассеяния рассчитывается по формуле:

Значение главной индуктивности определяется по формуле:
Соответственно, значение индуктивности статора определяется по формуле:
Расчётное значение постоянной времени статора Ts и соответственно расчётное значение постоянной времени ротора Tr рассчитывается по формулам:
В процессе исследований были рассчитаны параметры исследуемого двигателя по выше приведённой методике, а также определены аналогичные параметры в результате автоматической настройки. Результаты этих исследований приведены в таблице 1.
Табл. 1. Сравнение расчётных и измеренных параметров асинхронного двигателя
| Параметр | Измеренные параметры | Расчетные параметры | Δ |
| RS | 10,658 Ом | 7,375 Ом | 30,81 % |
| Lh | 488,107 мГн | 671 мГн | 27,25 % |
| σ | 0,065 | 0,098 | 33,67 % |
Таким образом, можно сделать вывод, что расчётные и измеренные параметры конкретного асинхронного двигателя существенно отличаются друг от друга. Это обуславливает необходимость применения программной самонастройки.
В приводах поколения SINAMICS заложены следующие способы регулирования скорости:
- U/f с линейной характеристикой;
- U/f с контролем тока намагничивания (FCC);
- U/f с программируемой зависимостью;
- U/f 2 с квадратичной зависимостью;
- U/f для текстильных машин;
- U/f с FCC для текстильных машин;
- U/f с независимым заданием напряжения;
- векторное регулирование без датчиков скорости;
- векторное регулирование с датчиком скорости;
- бездатчиковое регулирование момента;
- датчиковое регулирование момента.
В данной работе приводится анализ наиболее распространённых систем регулирования:
- U/f с линейной зависимостью;
- U/f с FCC управлением;
- векторное регулирование без датчика скорости.
В качестве критериев регулирования принято:
- максимальный диапазон регулирования D = ωmax/ωmin при номинальном моменте нагрузки;
- максимальный момент (момент вблизи момента опрокидывания);
- ток статора двигателя IS.
Исследования проводились для частот f = 50 Гц, f = 25 Гц, f = 10 Гц, f = 5 Гц, f = 1 Гц.
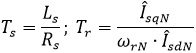
На рис. 3 приведены механические характеристики привода ωm = f(Mm) для различных систем управления/регулирования и различных значений частоты статора.
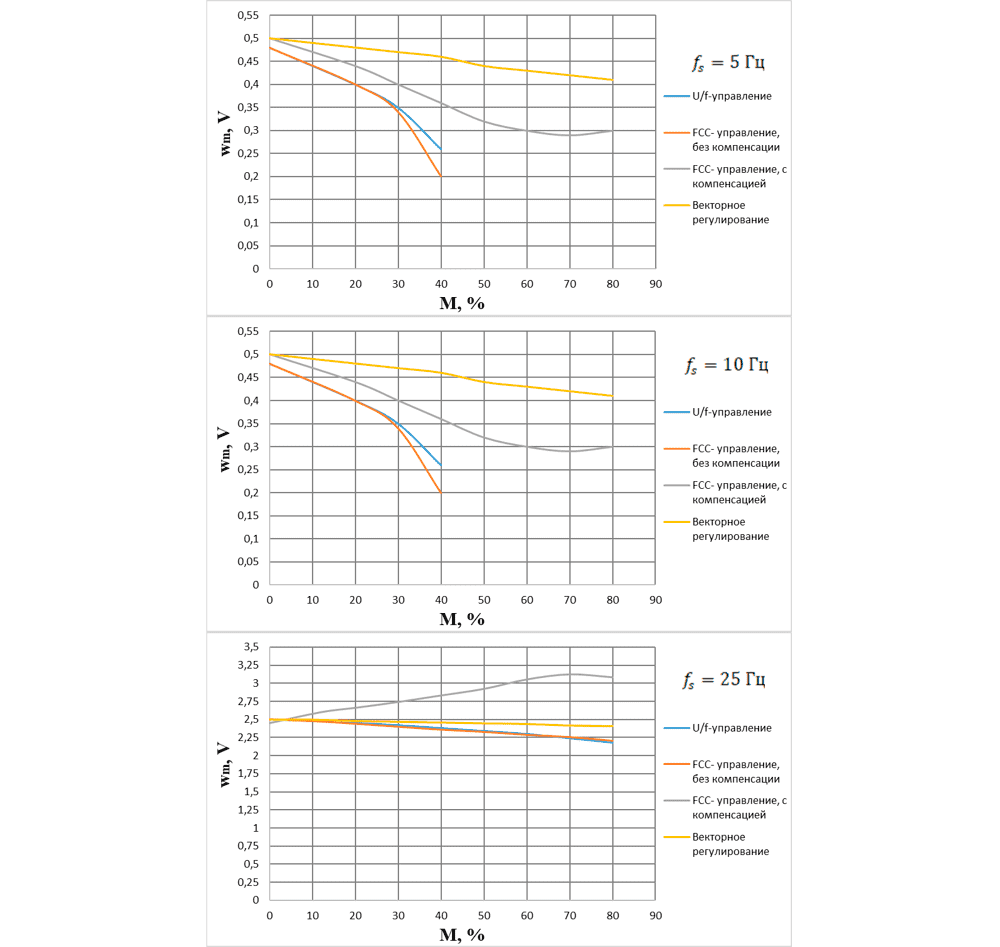
Рисунок 3 – Механические характеристики привода ωm = f(Mm)
На рис. 4 приведены зависимости тока статора от момента двигателя IS = f(Mm) для различных систем управления/регулирования и различных значений частоты статора.
Рисунок 4 – Зависимости тока статора от момента двигателя IS = f(Mm)
Приведённые зависимости ωm = f(Mm) и IS = f(Mm) однозначно свидетельствуют о преимуществе применения векторного регулирования в широком диапазоне изменения скорости.
Выводы
Анализ зависимостей ωm = f(Mm) и IS = f(Mm) частотно-регулируемого привода показывает, что при выборе способа регулирования/управления скорости предпочтение следует отдать векторному регулированию без датчика скорости, как с точки зрения стабильности механической характеристики, так и с точки зрения минимума потребления тока из сети.
Учитывая, что параметры конкретного асинхронного короткозамкнутого двигателя существенно отличаются от аналогичных параметров, рассчитанных по табличным данным, то при сравнении следует выбирать привода только с автоматической идентификацией параметров двигателя.
Список использованной литературы
1. Hasse K. Zur Dynamik drehzahlgeregelter Antriebe mit stromrichter-gespeisten Asynchron Maschinen. Dissertation, TH Darmstadt, 1969.
2. Blaschke F. Das Verfahren der Feldorientirung zur Regelung der Drehfeldmaschine, Dissertation, TU Braunschweig, 1974.
3. Leonard W. Regelung elektrischer Antriebe, Springer Verlag. – 1999.
4. Blaschke F. Das Prinzip der Feldorienierung, die Grundlage fur die Transvektor-Regelung von Drehfeldmaschinen. Siemens-Z. 45 (1971), s. 757–760.
5. Рудаков В. В., Столяров И. М., Дартау В. А. Асинхронные электропривода с векторным управлением. – Л.: Энергоатом – издат, 1987.
6. Tyshakin O., Riefenstahl U. Zweistufiger ruckspeisefahiger Direktumrichter fur Drehstromantriebe. – SPS/IPC/DRIVES200, Nurnberg. – 2004.