Аннотация
В. С. Титов, М. В. Бобырь, Н. А. Милостная, А. Л. Беломестная – Метод коррекции дрейфа нуля в операционных усилителей. Рассматривается оптико-электронная система, использующая операционные усилители для сравнения медленно изменяющихся сигналов, поступающих от датчиков. Описаны методы коррекции дрейфа нуля в существующих схемах. Предложен метод, позволяющий в режиме реального времени компенсировать напряжение смещения выходного сигнала.
Ключевые слова
Операционный усилитель, дрейф нуля, коррекция нуля, оптико-электронная система.
В управляющих схемах различного оборудования для усиления медленно изменяющихся сигналов наиболее часто применяется схема неинвертирующего усилителя. При этом если интегральная схема построена на биполярных транзисторах, то напряжение смещения нуля достигает 15 мВ, если на полевых, – то до 30 мВ, кроме того, в выходном сигнале операционного усилителя (ОУ) присутствует аддитивная погрешность, обусловленная некоторой разбалансировкой во входном каскаде. Схемотехническое решение указанной проблемы позволяет устранить как временной, так и температурный дрейфы выходного сигнала.
Сбор и обработка информации, поступающей от датчиков, – одна из наиболее важных функций оптико-электронной системы. При этом для обработки и анализа аналоговых сигналов практически во всех схемах используются ОУ, недостатком которых является дрейф уровня выходного напряжения или тока. К физическим причинам, вызывающим дрейф нуля, относятся такие факторы, как старение (нестабильность) источников питания и различных элементов схем, например транзисторов, низкочастотные шумы и помехи. Наиболее распространенный метод коррекции – использование глубоких отрицательных обратных связей и термокомпенсирующих элементов.
В традиционных методах коррекции дрейфа нуля используется периодическая коррекция начального уровня выходного сигнала путем формирования напряжения коррекции Uкор и последующего вычитания этого напряжения из входного напряжения усилителя за счет цепи обратной связи [1]. При этом для полной компенсации напряжения смещения ОУ необходимо, чтобы напряжение коррекции:
где Ku – коэффициент усиления ОУ;
Uсм – напряжение смещения ОУ.
Недостаток данного решения заключается в том, что для хранения значения напряжения коррекции используется запоминающий
конденсатор, заряд которого изменяется под действием тока утечки и входного тока ОУ. Поэтому приходится период повторения импульсов устанавливать исходя из допустимой аддитивной погрешности, обусловленной неточностью хранения запомненного напряжения. При этом цепь коррекции содержит ключи, которые также влияют на остаточную погрешность. Если ключ выполнен на МОП-транзисторах, то погрешность цепи коррекции составляет 100 мкВ с учетом того, что паразитная емкость (емкость между затвором и каналом) МОП-транзистора порядка 10 пФ, емкость запоминаю-щего конденсатора 1 мкФ, а изменение уровня запирающего импульса на затворе транзистора составляет 10 В. Применение микросхем выборки-хранения вместо конденсатора не позволяет устранить в полной мере указанные недостатки схемы компенсации дрейфа нуля на выходе ОУ.
Структурная схема оптико-электронной системы, позволяющей в режиме реального времени компенсировать дрейф нуля ОУ, приведена на рисунке [2,3]. Данная система работает следующим образом. Импульсы напряжения Uвх от оптического датчика 1 поступают на первый операционный усилитель ОУ1, где полученный сигнал сравнивается с эталонным значением напряжения, заданным на резисторе R. Однако если не ограничить большое петлевое усиление операционного усилителя ОУ2, то появится дрейф нуля и произойдет непроизвольное включение коммутатора 2.
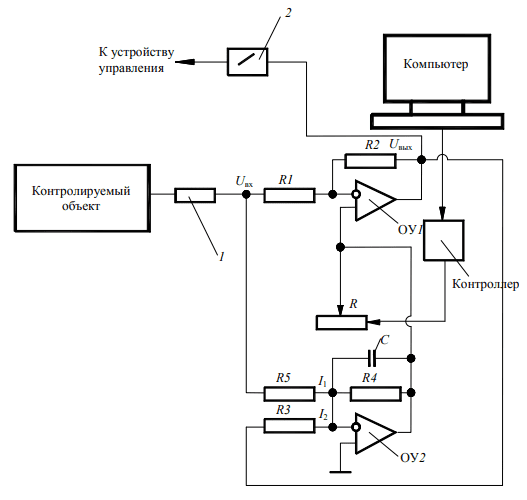
Рисунок 1 – Оптико-электронная система
Разработанная оптико-электронная система может использоваться для широкого спектра систем управления различными объектами. Например, оптический датчик 1 контролирует размер обрабатываемой детали, и если ее параметры превышают заданное поле допуска, то с помощью коммутатора 2 можно включить в работу исполнительные механизмы в целях пространственного изменения положения шпинделей.
Для коррекции дрейфа нуля предлагается использовать обратный преобразователь, выполненный на резисторе R3, и преобразующий выходное напряжение Uвых с ОУ1 в ток I2=Uвых/R3. Входное напряжение Uвх преобразуется в ток I1=Uвх/R5 на резисторе R5 [4].
Разность токов ΔI=I1-I2 преобразуется в сигнал выходного напряжения ОУ2. Иными словами, резисторы R3 и R5 выполняют функцию сравнения входного напряжения Uвх и выходного напряжения Uвых обратного преобразователя, а ОУ2 и резистор R4 выполняют функцию усилителя сигнала, пропорционального погрешности преобразования. При этом коэффициент усиления ОУ1 равен:

Для предотвращения режима самовозбуждения необходимо, чтобы I1=I2. В противном случае, если Uвых≠0, данное равенство выполняться не будет, следовательно, ОУ1 перейдет в режим самовозбуждения. Для исключения этой ситуации выходное напряжение ОУ2 должно быть равным нулю. Поэтому резисторы R3 и R5 следует выбирать исходя из соотношения:
Выходное напряжение Uвых=K1Uвх, тогда уравнение примет вид:
Подставим значение коэффициента K1 в выражение:
откуда

Условие необходимо выполнить для устранения режима самовозбуждения ОУ1. Таким образом, если первый операционный усилитель ОУ1 переходит в режим самовозбуждения, то второй операционный усилитель ОУ2 вырабатывает сигнал обратной связи, пропорциональный погрешности усиления ОУ1 (см. рисунок). При этом коэффициент усиления ОУ2 рассчитывается как K2=R4/R3 .
Для использования второго операционного усилителя в диапазоне низких частот конденсатор C подключается параллельно резистору R4.
Рассмотренный в статье пример показывает, что цепь обратной связи, сигнал которой пропорционален погрешности преобразования, позволяет исключить режим самовозбуждения ОУ, т.е. дрейф нуля, и улучшить в целом характеристики оптико-электронной системы.
Как показали результаты исследований, разработанный метод коррекции дрейфа нуля операционных усилителей в оптико-электронных системах характеризуется малыми значе-ниями временного и температурного дрейфа выходного сигнала. Предложенный метод может быть применен к различным системам управления широкого назначения, использующим для сравнения медленно изменяющихся сигналов операционные усилители.
Список использованной литературы
1. Nolan E. Demystifying auto-zero amplifiers // Analog Dialogue. 2000. № 34-1. Part 1 & 2.
2. Пат. 2379169 РФ. Кл. B 23Q15/00. Способ и устройство управления точностью обработки деталей / В. С. Титов, М. В. Бобырь, Е. С. Яхонтова // Изобретения. 2010. № 2.
3. Титов В. С., Бобырь М. В., Милостная Н. А. АСУ прогнозированием точности обработки деталей // Автоматизация в промышленности. 2008. № 4. С. 3—4.
4. Пат. 2371295 РФ. Кл. B23Q11/02. Устройство обработки деталей на оборудовании с ЧПУ / В. С. Титов, М. В. Бобырь, Н. А. Милостная // Изобретения. 2009. № 30.