 ДонНТУ
ДонНТУ Портал магістрів
Портал магістрів
Реферат за темою випускної роботи
Зміст
- Введення
- 1. Актуальність теми
- 2. Мета і завдання дослідження, плановані результати
- 3. Визначення стану системи у зовнішньому середовищі
- 4. Аналіз складу обладнання
- 5. Вибір програмованого контролера
- 6. Операційний підсилювач
- 7. Опис драйвера
- 8. Опис трекера
- 9. Принцип роботи
- 10. Налаштування Android-додатки
- Висновок
- Перелік посилань
Введення
Для робототехнічної системи однією з найважливіших завдань, є ідентифікація ситуації (місцезнаходження) в поточний момент часу. Рішення цієї задачі реалізується розробкою певних алгоритмів управління. Управління об'єктами здійснюється за допомогою методів штучного інтелекту [1].
1. Актуальність теми
Автономні інтелектуальні мобільні роботи призначені для автоматичної роботи в заздалегідь визначених умовах зовнішнього середовища. Вони можуть застосовуватися в різних областях людської діяльності і можуть вирішувати різні завдання. Наприклад, доставляти вантажі, переміщати різні предмети, проводити розвідку, проводити яку-небудь технологічну операцію на великому просторі (наприклад, прибирання приміщення) і т. п.
2. Мета і завдання дослідження
Мета роботи – Розробка моделі RC машини на базі мікропроцесора STM32f407, об'єкт повинен переміщатися по заданій траєкторії (лінії), яка визначається датчиком TCRT5000 (Line tracker sensor). Управління повинне бути здійснене через технологію Bluetooth, c допомогою мобільного додатку.
Враховуючи неповноту вхідної інформації, роботу в динамічно мінливому навколишньому середовищі, сформулюємо ряд завдань:
- Розробити архітектуру інтелектуальної системи управління;
- Розробити алгоритм ідентифікації і оцінки навколишнього середовища;
- Розробити на основі цих даних систему управління.
3. Визначення стану системи у зовнішньому середовищі
Первісною завданням, і однією з найважливіших для робототехнічної системи, є задача визначення поточного положення, у якій знаходиться робототехническая система.
Для цього, пристрій інтелектуального мобільного робота має включати програмну частину. Перш ніж представити структурну схему системи управління та ситуаційної ідентифікації, необхідно сформулювати ряд завдань, які повинна вирішувати система управління.
- Планування траєкторій руху;
- Розбір цільового завдання і розбиття цього завдання на ряд підзадач;
- Виконання руху по сформованим траєкторіях, необхідно виробити задають впливу для виконавчих механізмів робота;
На рисунку 1 представлена схема системи управління.
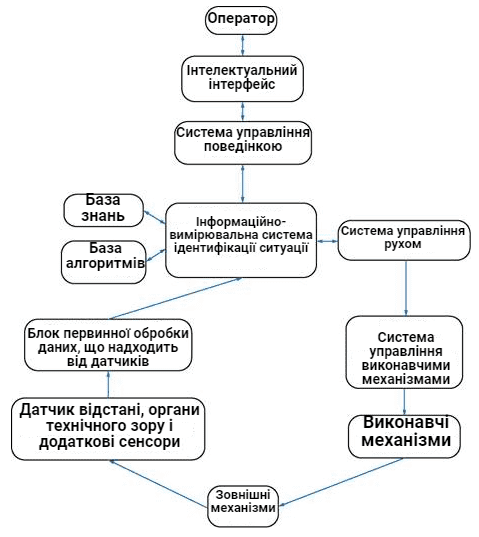
Рисунок 1 – Структурна схема системи керування та ідентифікації
Блок первинної обробки даних отримує необроблену інформацію з датчиків про стан зовнішнього середовища. У цьому блоці дані збираються, сгруппировываются і піддаються обробці. На виході виходять відформатовані дані, що передаються по стандартних протоколах. Це необхідно для зручності підключення нових датчиків, і чіткої систематизації даних, що надалі полегшує роботу з даними.
Інформаційно-вимірювальна система ідентифікації ситуації на основі оброблених даних вибудовує картину навколишнього світу. Дані з датчиків перетворюються в набір параметрів, на основі яких інші підсистеми приймають рішення.
Параметри формуються з допомогою бази знань і алгоритмів. Тут же проводиться розпізнавання оточуючих об'єктів і побудова сенсорної карти середовища. В базі алгоритмів містяться математичні алгоритми для вибудовування на основі даних цільової сенсорної карти, розпізнавання навколишнього обстановки і предметів (розпізнавання звукових образів і зображень, цифрова обробка сигналів, обчислення необхідних параметрів і перевірка отриманих даних. База знань являє інформацію про зовнішньому середовищі, закладену на етапі навчання і придбану в процесі функціонування. Знання впорядковуються і оновлюються.
Система управління поведінкою розбиває поставлене завдання на послідовність підзадач і формує поведінку робота для виконання завдань. Формує цільову точку, відповідні режими роботи інформаційно-вимірювальної системи ідентифікації. Від неї отримує дані про процес виконання і відображає їх користувачеві. Також надає користувачеві оброблену інформацію про ситуацію і сенсорну карту, отриману від інформаційно – вимірювальної системи ідентифікації.
Система управління рухом, враховуючи динамічні властивості робота і невизначеність середовища, формує значення швидкості руху і напрямок для здійснення поставлених цілей.
Інтелектуальний інтерфейс використовується для зв'язку з оператором. Його завдання полягає в тому, щоб контролювати функціонування робота і здійснювати спостереження за процесом виконання поставлених цілей.
Блок первинної обробки виробляє обробку та аналіз зображень, що надходять від оптико-електронних систем.
Враховуючи характер вирішуваних завдань, необхідно врахувати такі обмеження та особливості:
- Інформація про характеристики фону і спостережуваних об'єктів найчастіше містить неточні розміри об'єктів або зовсім відсутній;
- У зв'язку з обмеженістю часу на прийняття рішень і наявністю замкнутого контуру управління рухом обробка, аналіз і розпізнавання повинні виконуватися в реальному часі;
- Робота системи керування, стеження і обробки повинна проводитися при мінімальній участі людини або в автономному режимі.
В складних умовах, покращити якість сигналу і результату спостереження можна з допомогою алгоритмів оцінювання параметрів геометричних перетворень зображень і методів просторово-часової фільтрації [2].
- Для вимірювання положення нерухомих і рухомих об'єктів, спостережуваних на однорідному і неоднорідному тлі, використовуються методи на основі порівняння з еталоном;
- Використовуючи інформацію про статистичні властивості об'єкта і фону можна виділяти рухомі та нерухомі об'єкти, що спостерігаються на відносно однорідному фоні. Такі методи називаються методи статистичної сегментації;
- При виявленні об'єктів на тлі ясного або хмарного неба максимальну ефективність показують методи виділення об'єктів за допомогою просторової фільтрації. Дані методи використовують операції лінійної і нелінійної просторової фільтрації зображень;
- Методи виділення динамічних змін засновані на виділенні змін, що відбуваються з плином часу в спостережуваної групи зображень. Такі методи застосовуються при рішенні задачі виділення рухомих об'єктів.
На рисунку 2 представлена структура системи виявлення об'єктів, яка включає перераховані вище концепції.
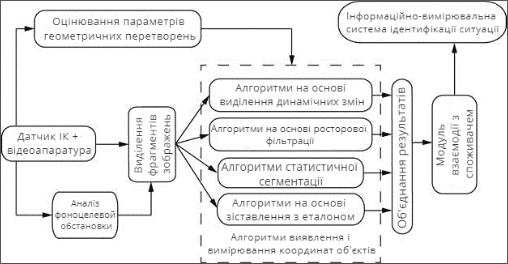
Рисунок 2 – Структура програмно-алгоритмічного забезпечення оптико-електронної системи виявлення об'єктів
4. Аналіз складу устаткування
В якості шасі використовується текстолітові плита та алюмінієві куточки до яких прикріплені двигунами з редукторами, до редукторів прикріплені колеса (рисунок 3).
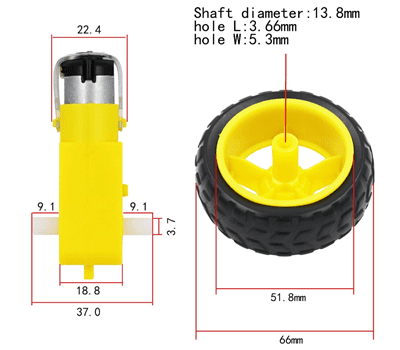
Рисунок 3 – Колесо і редуктор RC-машини
Керування системою здійснюється мікроконтролером STM32f407 на налагоджувальної платі Discovery
.
Для харчування об'єкта використовуються 3 послідовно з'єднані батареї напруга 12 Ст.
Керування двигунами здійснено через DC-DC драйвер L298N. Двигуни з'єднані послідовно.
Траєкторія обчислюється через датчики TCRT5000.
Для руху об'єкта використовується 4 колекторних двигуна. На двох двигунах встановлені енкодери l2523-60002. Величина з інформаційного виходу призначена для визначення швидкості. У двигунів (рисунок 4), суміщених з енкодером 6 виходів [3]:
- 2 для живлення двигуна;
- 2 інформаційних каналу;
- 2 для живлення енкодера.
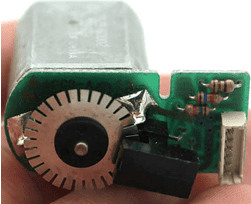
Рисунок 4 – Двигун з енкодером
Так як на виході енкодера сигнал має синусоїдальну форму, використовується ОУ для перетворення сигналу в прямокутні імпульси (рисунок 6). У схемі використовується ОУ AD8544, який припаяний до друкованої плати SOPI14.
Схема підключення зображена на рисунку 5.
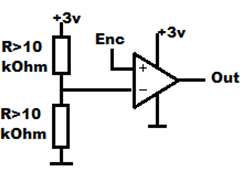
Рисунок 5 – Схема підключення енкодера до ОУ
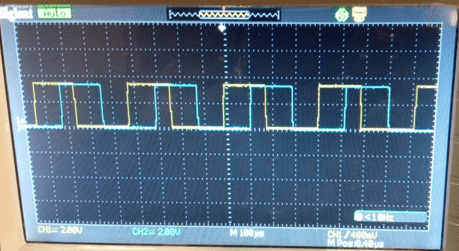
Рисунок 6 – Сигнали на виході ОУ
5. Вибір програмованого контролера
Сімейство STM32F407xx засноване на високопродуктивному ARM Cortex-M4 32-бітне RISC ядро, що працює на частоті до 168 МГц. Ядро має одиничну точність з плаваючою комою (FPU), яка підтримує всі інструкції обробки даних ARM і точні типи даних. Також реалізований повний набір DSP інструкції і блок захисту пам'яті (MPU), що підвищує безпеку програми.
Сімейство STM32F407xx включає в себе высокоскоростнуюые вбудовану пам'ять (флеш-пам'ять до 1 Мбайт, до 192 Кбайт SRAM), до 4 Кбайт резервне копіювання SRAM, а також широкий спектр додаткових операцій вводу-виводу і периферійних пристроїв, що мають 2 підключення.
Шини APB, три шини AHB і 32-бітова матриця з декількома шинами AHB [4]. Всі пристрої пропонують три 12-розрядних АЦП, два ЦАП, RTC з низьким енергоспоживанням, дванадцять універсальних 16-розрядні таймери, включаючи два PWM-таймера для управління двигуном, два 32-розрядних таймера загального призначення.
Генератор істинних випадкових чисел (ГВЧ). Вони також мають стандартні і передові комунікаційні інтерфейси.
- До трьох I2C;
- Три SPI, два I2S в повнодуплексному режимі. Для досягнення точності аудіо класу периферійні пристрої I2S можна синхронізувати через виділений внутрішній аудіо PLL або через зовнішні години;
- Чотири USART і два UART;
- USB OTG високошвидкісний USB OTG високошвидкісний з можливістю повної швидкості (сULPI);
- Два CAN;
- Інтерфейс SDIO / MMC;
- Ethernet інтерфейс камери.
Нові вдосконалені периферійні пристрої включають SDIO, розширений гнучкий контроль статичної пам'яті (FSMC) інтерфейс (для пристроїв, пропонованих в упаковках по 100 контактів і більше), камера інтерфейс для датчиків CMOS.
Сімейства STM32F407xx працюють при температурі від -40 до +105 °C.
Діапазон від джерела живлення від 1,8 до 3,6 Ст. Напруга живлення може впасти до 1,7 У, коли пристрій працює в діапазоні температур від 0 до 70 °C з використанням зовнішнього джерела живлення.
Режим дозволяє проектувати малопотужні програми.
Сімейство STM32F407xx пропонує пристрою в різних комплектаціях від 64 до 176 контактів. Набір включеної периферії змінюється в залежності від обраного пристрою.
Ці особливості роблять сімейство мікроконтролерів STM32F407xx підходить для широкого спектру застосувань:
- Моторний привід і контроль додатків;
- Медичне обладнання;
- Промислове застосування: ПЛК, інвертори, автоматичні вимикачі;
- Принтери та сканери;
- Системи сигналізації, відеодомофон та HVAC;
- Побутова аудіо техніка.
Зовнішній вигляд контролера представлений на рисунку 7, а блок-схема STM32F407 – на рисунку 8.
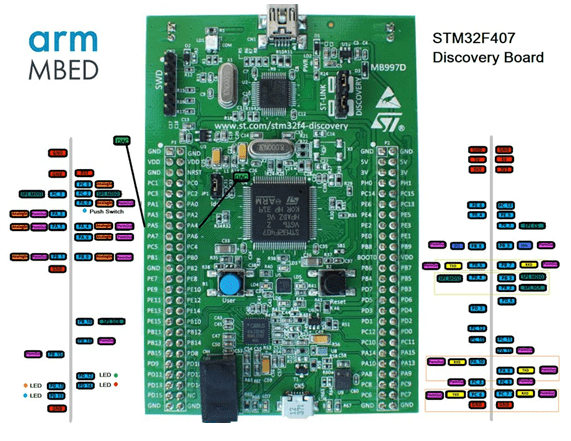
Рисунок 7 – Плата STM32F407 Discovery
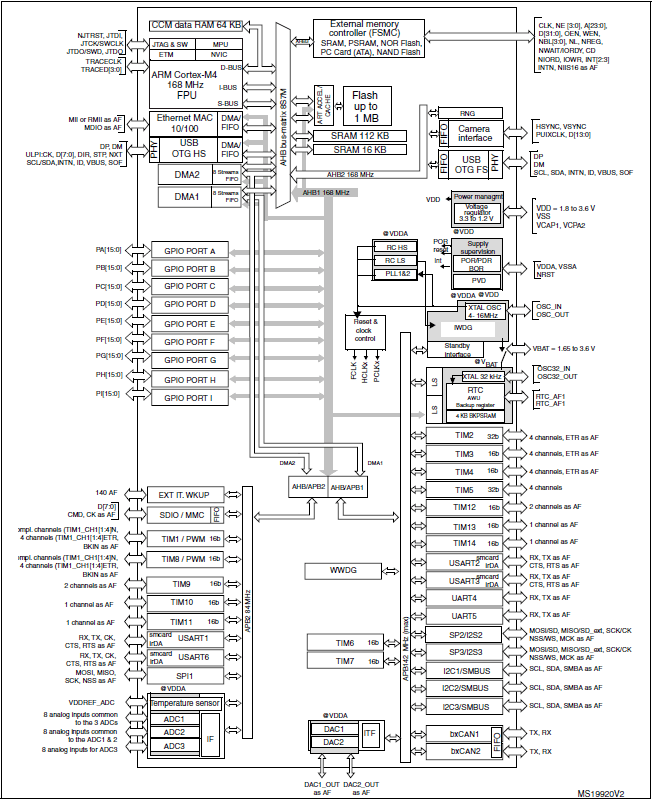
Рисунок 8 – Блок-схема STM32F407
6. Операційний підсилювач
Особливості цієї серії полягають у більш низькому струмі живлення при пропускної спроможності 1 МГц, більш високому вихідному струмі і кращої продуктивності при більш низькій напрузі.
AD8544 являє собою одиночні, подвійні і чотириканальні підсилювачі на вході і виході з одним рейкою і дуже малим струмом живлення, смуга пропускання 1 МГц. Все це працює від одного джерела живлення 2,7 У, а також від джерела живлення 5 В. При живленні 5 В струм в ланцюзі зазвичай становить 60 мкА, але навіть при 1 від шини живлення підсилювача AD854x може забезпечити вихідний струм 30 мА. Ці частини забезпечують смугу пропускання 1 МГц при низькому споживанні струму 45 мА на підсилювач.
У серії AD854x зазвичай використовується струм 45 мкА на підсилювач, що набагато менше, ніж від 200 мкА до 700 мкА, що використовувалися в попередніх версіях з аналогічними характеристиками. Всі ці переваги роблять серію AD854x – хорошим вибором для модернізації портативних пристроїв, а також для збільшення терміну служби батареї.
Краща продуктивність при більш низьких напругах.
Сімейство AD854x було розроблено для забезпечення кращої продуктивності в порівнянні з попередніми версіями при харчуванні у 3,0 У і 2,7 Ст.
Типове значення смуги пропускання посилення близько до 1 МГц при 2,7 Ст. Посилення напруги при 2,7 У і 3,0 У зазвичай становить 500 000. Допустимий запас по температурі становить понад 60 °C, що істотно полегшує використання даного обладнання.
Дуже низькі вхідні струми зміщення включають AD8544 для використання в інтеграторах, фотодіодних підсилювачах, п'єзоелектричних датчики та інші додатки з високим опором джерела. Струм живлення становить всього 45 мА на підсилювачі, ідеально підходить для роботи від батареї.
AD8544 оптимізовані для підтримки високих коефіцієнтів підсилення при більш низьких напругах живлення, роблячи їх корисними для активних фільтрів і ступенів посилення.
AD8544 використовується для розширеного діапазону промислових температур (від -40 °C до + 125 °C). Він поставляється у вузьких корпусах SOIC з 14 отведениями і TSSOP з 14 отведениями.
Блок-схема О наведена на рисунку 9.
Рисунок 9 – Блок-схема ОП [5]
анімація: 6 кадрів, 7 циклів повторення, 15,85 кілобайт)
7. Опис драйвера
L298 являє собою інтегровану монолітну ланцюг з 15-висновками. Це високовольтний здвоєний повно прохідний драйвер з високим струмом, призначений для прийняття стандартних логічних рівнів TTL і приводу індуктивні навантаження, такі як реле, соленоїди, постійний струм та крокові двигуни. Два дозвільних входу можуть включити або вимкнути пристрій незалежно від вхідних сигналів.
Емітери нижніх транзисторів кожного моста з'єднані один з одним, і відповідний зовнішній термінал може бути використаний для підключення зовнішнього чутливого резистора. Додатковий вхід живлення передбачений так, що логіка працює при більш низькій напрузі.
Технічні особливості:
- Драйвер L298N;
- Медичне обладнання;
- Напруга двигуна до 35 У;
- Логічне напруга: 5 У;
- Розмір 44 х 44 х 30 мм.
Опис введення [6]:
- Vcc – живлення двигуна;
- GND – земля;
- OUT1, OUT2 – вихід першого каналу;
- OUT3, OUT4 – вихід другого каналу;
- ENA – включення першого канал;
- IN1, IN2 – направлення першого каналу;
- ENB – включення другого каналу;
- IN3, IN4 – напрям другого каналу.
Зовнішній вигляд драйвера L298N наведено на рисунку 10, блок-схема – на рисунку 11.
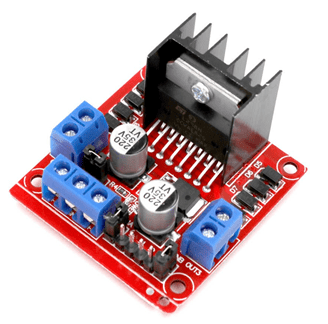
Рисунок 10 – Драйвер L298N
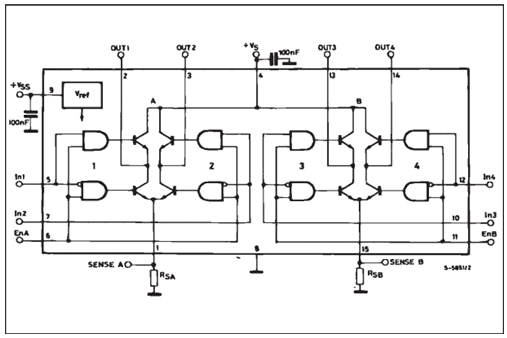
Рисунок 11 – Блок-схема драйвера L298N
8. Опис трекера
Цей ІЧ-відображає датчик використовує TCRT5000 для визначення кольору і відстані. Він випромінює ІЧ-сигнал, а потім виявляє, чи отримує він ехо. Цей датчик часто використовується в лінії, наступного за роботами, для автоматичної реєстрації даних на лічильниках комунальних послуг, тому що цей модуль може визначати, чи є поверхня білою або чорною.
Діапазон вимірювання відстані від 1; мм до 8; мм, а центральна точка становить близько 2,5; мм. Також є вбудований потенціометр для регулювання чутливості.
Інфрачервоний діод буде випромінювати інфрачервоне світло безперервно, коли модуль підключається до джерела живлення, коли випромінюється інфрачервоний світло не відбивається або його потужність недостатньо велика, тріод буде у вимкненому стані, в цей час логічний D0 вихід LOW і сигнал індикації світлодіод вимкнений.
Область застосування [7]:
- Виявлення опадів;
- Витік рідини;
- Датчик переповнення бака.
Особливості:
- Напруга живлення: 3,3; У; ˜ 5; У;
- Визначити відстань: 1; мм-8; мм;
- Цифрові виходи HIGH при виявленні об'єктів;
- Світлодіодний індикатор на борту, щоб показати результати;
- Бортовий потенціометр для регулювання чутливості;
- Вбудований чіп LM393.
Зовнішній вигляд датчика зображений на рисунку 12.
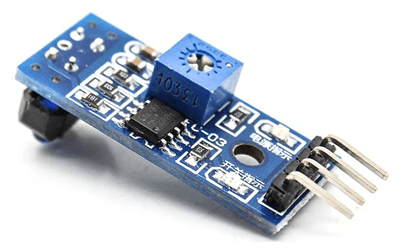
Рисунок 12 – Модуль цифрового датчика лінії TCRT5000
9. Принцип роботи
В Android пристрої формуються команди переміщення машинки в залежності від нахилу смартфона/планшета, або від натиснутої кнопки. Всі розрахунки проводяться в Android-додатку, і відразу ж обчислюються значення ШІМ для лівого і правого двигунів. Програма має гнучкими налаштуваннями, такими як діапазон ШІМ, чутливість нахилу, мінімальний поріг ШІМ та ін. По Bluetooth передаються команди види:
- L – команда для лівого двигуна, R – для правого;
Мінус
позначає обертання двигуна для руху назад;- 255 – число ШІМ, для Arduino це максимальна швидкість обертання;
- \r – кінець команди.
L-255\r R-120\r
По цій команді машинка буде рухатися назад і трохи повертати праворуч, т. к. правий двигун буде обертатися повільніше лівого.
L255\rR-255\r
По цій команді лівий двигун буде обертатися вперед, а правий тому, що змусить машинку обертатися навколо своєї осі проти годинникової стрілки.
H1\r
Ця команда служить для включення додаткового каналу, до якого можна підключити джерело світла (світлодіод), динамік і т. п. як приклад, наведено лише один додатковий канал, однак легко модифікувати, щоб задіяти більшу кількість додаткових каналів.
Символи команд L, R і H можна задавати в настройках Android-додатки. Також для роботи з пам'яттю мікроконтролера передбачені команди Fr – читання значень і Fw – запис значень.
Для написання програми під Android може бути використана середовище Eclipse [8].
10. Налаштування Android-додатки
До кожної налаштуванні внизу є невелике пояснення, де вказано за що відповідає конкретний пункт (рисунок 13).
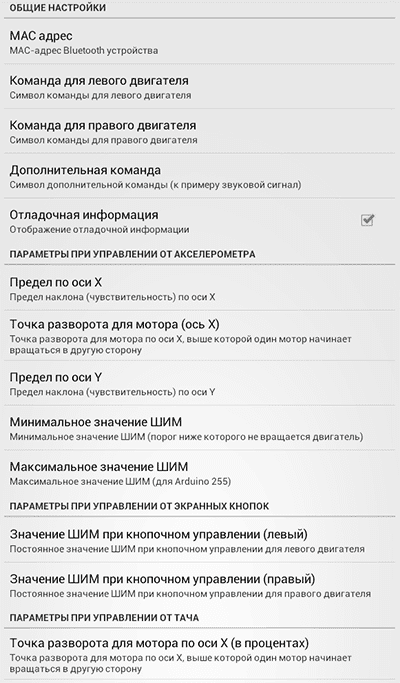
Рисунок 13 – Скріншот налаштувань Android-додатки CxemCar версії 1.0 [9]
Для встановлення зв'язку з Bluetooth модулем машинки, в налаштуваннях програми необхідно задати MAC-адресу. Попередньо необхідно налаштувати сполучення пристроїв в налаштуваннях вашого Android-пристрої. Для цього переходимо в Налаштування Bluetooth і натискаємо Пошук пристроїв
(рисунок 14), телефон знаходить наш Bluetooth-модуль, натискаємо на нього і вводимо пароль.
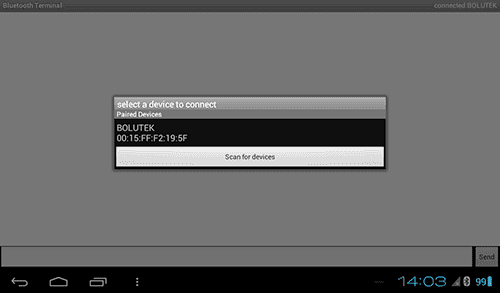
Рисунок 14 – Підключення пристрою [10]
Висновок
У ході розробки мобільного робота, на підставі завдань, що плануються до виконання, був вибраний мікроконтролер, а також необхідні датчики для реалізації відстеження траєкторії і визначення роботом «себе» в просторі в даний момент часу. Крім цього, під час виконання проекту було складено певний алгоритм керування роботом з мобільного пристрою. Всі сигнали для переміщення машинки формуються від натиснутої кнопки, що дає чітке розуміння пристрою, в якому режимі працювати [11].
В подальшому планується доведення всіх алгоритмів рух та орієнтації до автоматизму і реалізація функції автоматичної парковки без участі людини, а лише за рахунок сигналів, що надходять з датчиків і закладеного алгоритму.
Перелік посилань
- Simulink. [Электронный ресурс]. – Режим доступа: https://matlab.ru/products/Simulink
- WaijungBlockset. [Электронный ресурс]. – Режим доступа: http://waijung.aimagin.com/
- Reflective Optical Sensor with Transistor Output, DataSheet № TCRT5000
- DUAL FULL-BRIDGE DRIVER, Electronics Description, DataSheet № L298N
- Eclipse (среда разработки). [Электронный ресурс]. – Режим доступа: https://www.eclipse.org/
- Интерфейсная шина IIC (I2C). [Электронный ресурс]. – Режим доступа: http://easyelectronics.ru/...
- Управление мобильными роботами [Электронный ресурс]. – Режим доступа: https://moluch.ru/...
- STM32F407VE [Электронный ресурс]. – Режим доступа: https://www.st.com/...
- CMOS Rail-to-Rail General-Purpose Amplifiers, DataSheet № AD8541_8542_8544
- 1CxemCAR - Android-управление машинкой по Bluetooth. [Электронный ресурс]. – Режим доступа: https://cxem.net/...
- Датчик линии TCRT5000 цифровой. [Электронный ресурс]. – Режим доступа: http://know.smartelements.ru/...