Каскадные АСР
Авторы: А. П. Архаров, Е. С.Шаньгин, Б. И. Клебанов
Источник: Автоматизация технологических процессов и объектов. Конспект лекций. 2009
Каскадные системы применяют для автоматизации объектов, обладающих большой инерционностью по каналу регулирования, если можно выбрать менее инерционную по отношению к наиболее опасным возмущениям промежуточную координату и использовать для нее то же регулирующее воздействие, что и для основного выхода объекта.
В этом случае в систему регулирования (рис.1) включают два регулятора — основной (внешний) регулятор, служащий для стабилизации основного выхода объекта y, и вспомогательный (внутренний) регулятор, предназначенный для регулирования вспомогательной координаты y. Заданием для вспомогательного регулятора служит выходной сигнал основного регулятора.
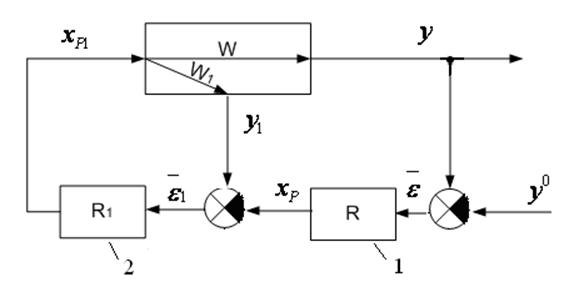
Рисунок 1 – Структурная схема каскадной АСР
Выбор законов регулирования определяется, назначением регуляторов:
- для поддержания основной выходной координаты на заданном значении без статической ошибки закон регулирования основного регулятора должен включать интегральную составляющую;
- от вспомогательного регулятора требуется, прежде всего, быстродействие, поэтому он может иметь любой закон регулирования (в частности пропорциональный как наиболее простой и достаточно быстродействующий).
Сравнение одноконтурных и каскадных АСР показывает, что вследствие более высокого быстродействия внутреннего контура и каскадной АСР повышается качество переходного процесса, особенно при компенсации возмущений, поступающих по каналу регулирования (при этом инерционность эквивалентного объекта благодаря внутреннему контуру снижается по сравнению с инерционностью основного канала регулирования).
Если по условию ведения процесса на вспомогательную переменную накладывается ограничение (например, температура не должна превышать предельно допустимого значения или соотношение расходов должно лежать в определенных пределах), то на выходной сигнал основного регулятора, который является заданием для вспомогательного регулятора, также накладывается ограничение. Для этого между регуляторами устанавливается устройство с характеристиками усилительного звена с насыщением.
Примеры каскадных АСР технологических объектов. На рис. 2 приведен пример каскадной системы стабилизации температуры жидкости на выходе из теплообменника, и которой вспомогательным контуром является АСР расхода греющего пара. При возмущении по давлению пара регулятор1 изменяет степень открытия регулирующего клапана таким образом, чтобы поддержать заданный расход. При нарушении теплового баланса в аппарате (вызванном, например, изменением входной температуры или расхода жидкости, энтальпии пара, потерь тепла в окружающую среду), приводящем к отклонению выходной температуры от заданного значения, регулятор температуры 2 корректирует задание регулятору расхода 1.

Рисунок 2 – Каскадная система регулирования температуры (2) с коррекцией задания регулятору расхода пара (1).
В химико-технологических процессах часто основная и вспомогательная координаты имеют одинаковую физическую природу и характеризуют значения одного и того же технологического параметра в разных точках системы (рис. 3).
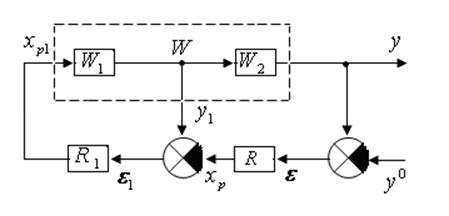
Рисунок 3 – Структурная схема каскадной АСР с измерением вспомогательной координаты в промежуточной точке.
На рис. 3 показаны фрагмент технологической схемы, включающий подогреватель реакционной смеси и реактор, и система стабилизации температуры в реакторе. Регулирующее воздействие - расход пара - подается на вход теплообменника. Канал регулирования, включающий два аппарата и трубопроводы, является сложной динамической системой с большой инерционностью. На объект действует ряд возмущений, поступающих в разные точки системы, - давление и энтальпия пара, температура и расход реакционной смеси, потери тепла в реакторе и т. п. Для повышения быстродействия системы регулирования применяют каскадную АСР, в которой основной регулируемой переменной является температура в реакторе, а в качестве вспомогательной выбрана температура смеси между теплообменником и реактором.
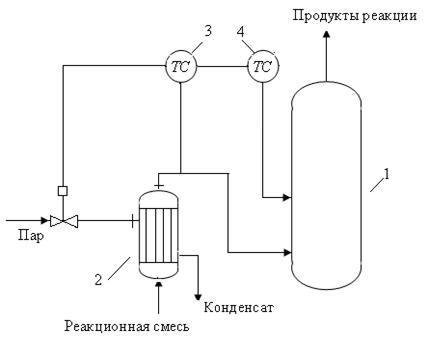
Рисунок 4 – Каскадная система регулирования температуры (4) в реакторе (1) с коррекцией задания регулятору температуры (3) на выходе теплообменника (2).
Расчет каскадных АСР. Расчет каскадной АСР предполагает определение настроек основного и вспомогательного регуляторов при заданных динамических характеристик объекта по основному и вспомогательному каналам. Поскольку настройки основного и вспомогательного регуляторов взаимозависимы, расчет их проводят методом итераций.
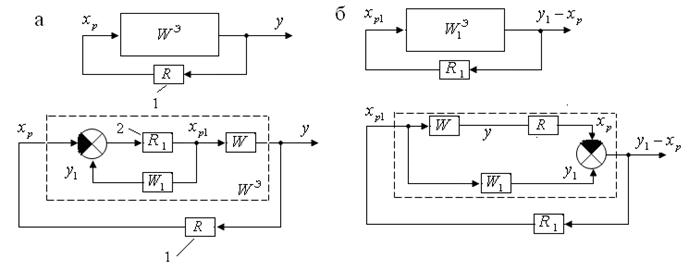
Рисунок 5 – Структурные схемы эквивалентной одноконтурной системы регулирования с основным (1) и вспомогательным (б) регуляторами: вверху – эквивалентная одноконтурная схема; внизу – преобразование каскадной АСР к одноконтурной.
На каждом шаге итерации рассчитывают приведенную одноконтурную АСР, в которой один из регуляторов условно относится к эквивалентному объекту. Как видно из структурных схем на рис. 5, эквивалентный объект для основного регулятора 1 (рис. 5 а) представляет собой последовательное соединение замкнутого вспомогательного контура и основного канала регулирования; передаточная функция его равна:
Эквивалентный объект для вспомогательного регулятора 2 (рис. 5б) является параллельным соединением вспомогательного канала и основной замкнутой системы. Его передаточная функция имеет вид:

В зависимости от первого шага итерации различают два метода расчёта каскадных АСР.
1-метод. Расчёт начинают с основного регулятора. Метод используют в тех случаях, когда инерционность вспомогательного канала намного меньше, чем основного.
На первом шаге принимают допущение о том, что рабочая частота основного контура (ωρ) намного меньше, чем вспомогательного (ωρ4), и при ω=ωρ
Тогда

Таким образом, в первом приближении настройки S0 основного регулятора 1 не зависят от R1(ρ) и находятся по WЭ0(ρ).
На втором шаге рассчитывают настройки вспомогательного регулятора  для эквивалентного объекта с передаточной функцией WВ1(ρ), в которую подставляют R(ρ,S0).
для эквивалентного объекта с передаточной функцией WВ1(ρ), в которую подставляют R(ρ,S0).
2–й метод. Расчёт начинают со вспомогательного регулятора. На первом шаге предполагают, что внешний регулятор отключён, т.е.

Таким образом, в первом приближении настройки вспомогательного регулятора  находят по одноконтурной АСР вспомогательного канала регулирования. На втором шаге рассчитывают настройки основного регулятора по передаточной функции эквивалентного объекта
находят по одноконтурной АСР вспомогательного канала регулирования. На втором шаге рассчитывают настройки основного регулятора по передаточной функции эквивалентного объекта  с учётом
с учётом  . Для уточнения настроек вспомогательного регулятора расчёт проводят по передаточной функции
. Для уточнения настроек вспомогательного регулятора расчёт проводят по передаточной функции  , в которую подставляют
, в которую подставляют  . Расчёты проводят до тех пор, пока настройки вспомогательного регулятора, найденные в двух последовательных итерациях, не совпадут с заданной точностью (рис. 6,б).
. Расчёты проводят до тех пор, пока настройки вспомогательного регулятора, найденные в двух последовательных итерациях, не совпадут с заданной точностью (рис. 6,б).

Рисунок 6 – Блок-схемы алгоритмов расчёта каскадных АСР:
а – при выполнении высокого быстродействия внутреннего контура по сравнению с внешним; б – при условии отключения внешнего регулятора в начальном приближении.
Список использованной литературы
- Акулич, И. Л. Математическое программирование в примерах и задачах: учебное пособие / И Л. Акулич. - М.: Высшая школа, 1986. - 300 с.
- Аль-Бареда, А. Я. С. Алгоритм синтеза системы управления методом нейронных сетей / А. Я. С. Аль-Бареда, К. А. Пупков // Инженерный системы - 2015: труды VIII международной научно-практической конференции (Москва, 2022 апреля 2015 г.) - М.: РУДН, 2015. - С. 224 - 227.