Аннотация
Предложена модель времени отклика систем аэрации на СОСВ. Он включает в себя задержки, вызванные системой подачи воздуха (состоящей из нагнетателей, дросселей и труб), временем нарастания пузырьков воздуха и всеми контурами управления, кроме главного контроллера DO. Помимо описания необходимых экспериментов с изменением ступеней, в зависимости от имеющихся данных приводятся различные подходы к калибровке модели..
Введение
Система подачи воздуха является основным фактором затрат на электроэнергию, на ее долю приходится около 60% общее энергопотребление в системах с активным илом. Биологические процессы зависят значительно на наличие или отсутствие определенного количества DO в реакторах. Поэтому системы управления аэрацией на очистных сооружениях должны работать правильно и надежно, чтобы обеспечить оптимальные результаты с точки зрения экономической и экологической жизнеспособности. Однако разработка и параметризация контуров управления остается проблемой при очистных сооружениях. Основные неопределенности связаны с неизвестными постоянными времени системы. Много статические правила проектирования, которые дают первый совет относительно настроек параметров, но они не подходят для прогнозирования динамического поведения при различных нагрузках или условиях процесса. Подходящим инструментом, который явно учитывает временные константы, является динамическое моделирование.
Этот тип моделирования позволяет лучше проектировать контроллер, чем чисто эмпирический оценка и имеет следующие преимущества:
- систематическая и экономящая время оценка различных концепций управления в условиях близко к реальности;
- оценка при различных условиях загрузки и процесса;
- сравнение концепций управления при одинаковых условиях;
- настройка медленных петель управления;
Требуемая сложность модели системы аэрации зависит от цели исследования. Большинство исследований посвящено сравнению различных стратегий процессов, которые не требуют подробные модели. Тем не менее, исследования предназначены для сравнения различных контроллеров при изменении нагрузка и условия процесса или параметризация контроллеров в автономном режиме требуют строгой дифференциации между моделями для контроллера, реактора, датчика и системы аэрации.
В этой статье цель состоит в том, чтобы смоделировать систему управления DO в соответствии с требованиями инженера-технолога. Это означает, что главный цикл управления DO должен оцениваться с целью оптимизации биологических процессов, а не для оценки цепочки контуры управления, обычно используемые для контроля аэрации. В результате предлагается простая модель, который описывает задержку, вызванную системой аэрации и методом калибровки модель, основанная на пошаговых экспериментах. Три тематических исследования продемонстрируют применимость модели и полученное время отклика.
Система управления аэрацией
Следующие модели необходимы для описания системы контроля аэрации (рис. 1):
- систематическая и экономящая время оценка различных концепций управления в условиях близко к реальности;
-
Модель реактора:
- дыхание (биокинетические модели, например, семейство ASM, Henze et al., 2000);
- влиятельная модель (расчет компонентов модели на основе измерений);
- гидравлическое поведение и транспортные процессы;
- процесс аэрации;
- датчики;
- мастер DO контроллер;
-
Модель аэрационной системы:
- оставшиеся контуры управления;
- система подачи воздуха;
- дополнительная задержка после измерения расхода из-за времени нарастания пузырьков воздуха, сопротивления и объем диффузорной системы;
Модель аэрационной системы
Система аэрации, предложенная в этой работе (рис. 1), включает в себя все контуры управления, кроме главный контур управления DO (, система подачи воздуха и дополнительный задержка, вызванная временем нарастания пузырьков воздуха и сопротивлений, а также объемом диффузора система. Система подачи воздуха состоит из различного контрольного оборудования, такого как комплект воздуходувок и включает в себя преобразователи частоты, клапаны, воздушные трубы и коллекторы.
Разграничение между главным и остальными контурами управления DO
Система управления подачей воздуха состоит из различных контуров управления в соответствии с дизайн завода. Внутренний или машинный контур управления регулирует блок воздуходувки, который содержит специальные пандусы для запуска или вождения машин или специальные команды переключения для двигателей. Вентиляторы корневого типа управляются для работы с фиксированной мощностью, тогда как Турбовоздуходувки имеют регулятор обратной связи, который контролирует измеренный расход воздуха при расчетная уставка. Следующий цикл контролирует производительность воздуходувки. Это обычно выполняется регулятором давления в системе воздушного коллектора, контуром управления DO ( используя среднюю концентрацию DO по всем дорожкам) или с помощью дополнительной информации такие как положения клапана (контроль положения клапана). Цикл управления каждой отдельной полосой движения регулирует подачу воздуха к этой конкретной полосе движения.
Первый шаг упрощения моделирования - определить главный контроллер, который отвечает за подачу воздуха в реактор (рис. 1). Исследование обычно ограничивается контроллером DO только одной полосы движения. Основное предположение состоит в том, что все полосы получают одинаковая нагрузка и одинаковое кислородное дыхание. Что должно быть смоделировано, зависит от тип применяемого управления DO. Если давление воздуха в коллекторе контролируется, Важным контуром управления является контроллер DO отдельной полосы движения, так как подача воздуха контролируется только клапанами дорожек. Если подача воздуха контролируется средним DO концентрация всех дорожек, это главный контур управления, а контроллер клапана используется только для тонкой настройки распределения воздуха.
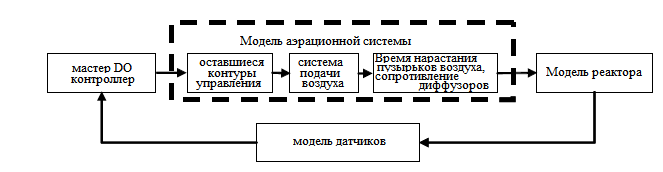
Рисунок 1 – Диаграмма действий контура управления, предложенная в этой работе
В результате система аэрации будет упрощена до одного главного контроллера DO и задержка оставшихся контрольных петель, которая добавляется к времени отклика воздуха Система снабжения (рисунок 1).
Время нарастания пузырьков воздуха / сопротивление диффузоров
Полный газообмен обычно должен быть включен в процесс аэрации. Но потому что время пребывания пузырьков воздуха в реакторе и его задержка обычно пренебрегая, мы предлагаем включить его в модель системы аэрации. Эта задержка в диапазон 0,1–1 мин. Скорость подъема воздушного пузыря составляет ок. 30 см / сек для общего диаметр пузырьков 2–3 мм (Siegrist, 2004). Для реактора глубиной 4 м это приведет к времени нарастания ок. 15 сек Потому что измерение воздушного потока - который используется для калибровки - расположен выше по потоку от диффузоров, эта задержка также должна быть оценена или измерения отработавших газов должны быть выполнены.
Моделирование времени отклика
Система аэрации моделируется как постоянная задержка изменения воздушного потока в реактор. Поведение в реальном времени обычно является комбинацией более или менее постоянной задержка из-за сопротивлений и объемов труб и дросселей и скорости подъема пузырьки воздуха в реакторе и динамическая часть, вызванные ускорением или остановкой блок воздуходувки.
Чтобы охарактеризовать динамическое поведение, мы предлагаем использовать те же термины, что и используется для характеристики оперативных датчиков (ISO 15839, 2003; Rieger et al., 2003a). На На основе шага отклика задержка (или мертвое время) определяется как время, необходимое для достижения 10% от окончательного значения пошагового ответа (T10). Общее время, необходимое для достижения 90% окончательное значение шага отклика вводится как время отклика (T90).
В реализации SIMULINK время отклика скорости воздушного потока преобразуется с помощью линейной передаточной функции. Поведение времени моделируется с использованием серии Лапласа передаточные функции (уравнение 1). Количество передаточных функций первого порядка в серии (n) определяет отношение задержки (T10) к времени отклика (T90). С уважением к необходимое время моделирования, количество передаточных функций в серии должно быть как возможно. Этот вид моделирования приводит к постоянной задержке, которая не зависит от размер шага изменения. Динамическая часть игнорируется по причинам упрощения.
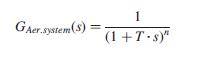
GAer. system система передаточная функция для времени отклика; T T90 / коэффициент constant постоянная времени достичь определенного времени Т90 для данного n; s operator оператор Лапласа, n номер перевода функции в серии.
Калибровка модели
Для определения времени отклика можно использовать эксперименты с изменением шага (рис. 2), но с разницей например модели датчиков (Rieger et al., 2003a) прямые измерения невозможны и поэтому необходимо выполнить процедуру калибровки модели. Проблема, которая часто возникает при калибровке модели, заключается в отсутствии измерительного устройства для потока воздуха в каждый отдельный переулок. Это предотвращает прямую калибровку на основе измерений воздушного потока. Косвенным методом является согласование смоделированных концентраций DO с измеренными значения путем введения времени отклика скорости воздушного потока. В этом случае, однако, кислород скорость переноса должна быть известна, поскольку параметры переноса кислорода и Время отклика модели аэрационной системы четко не определяется.
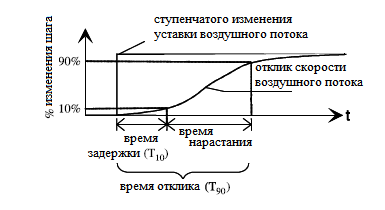
Рисунок 2 – Поэтапный эксперимент скорости воздушного потока