Аннотация
Пугач Н. А., Неежмаков С. В. Разработка блока управления стенда погрузочного комплекса шахты. Приведены итоги разработки блока управления стендом погрузочного комплекса шахты. Визуализирован технологический процесс погрузки полезного ископаемого в вагоны, и работы пульта управления стендом с использованием инструментального программного комплекса промышленной автоматизации CoDeSys.
Технологический комплекс поверхности шахты – это заверщающий этап в добыче полезного ископаемого в шахте, и по этому один из важнейших[1]. ТКПШ – является комплексом горно-технических сооружений и зданий на поверхности шахты, обеспечивающий работу её подземного хозяйства, а также складирование, переработку (при наличии соответствующих комплексов) и отправку потребителям добытого сырья. Для наглядной демонстрации процесса погрузки полезного ископаемого в вагоны, был разработан стенд погрузочного комплекса шахты.
Блок управления стенда погрузочного комплекса шахты представляет собой закреплённые на вертикальной и горизонтальной поверхностях следующие компоненты:
- Два вертикально расположенных бункера(№1,№2), для двух видов сыпучих материалов. Бункера выполнены в виде пластиковых ёмкостей.
- Две задвижки для бункеров (№1,№2) ,управляемые ПЛК-63 выполненные на основе CD-ROMов, соединённых с двигателем, и концевиками.
- Два подвода для соединения бункеров (№1,№2), с основным бункером №3, выполненный так же в виде пластиковой ёмкости, с задвижкой. Подводы изготовлены из 2 пластмассовых труб, для подачи сыпучего материала (гелевые шарики), в основной бункер.
- Индуктивный датчик для контроля уровня сыпучих материалов, в основном бункере. Датчик передвигаясь по вертикали, воздействует на герконовый датчик, который замыкаясь подает сигнал, о достижении определённого уровня. Перемещается индуктивный датчик с помощью CD-ROMа, герконовый датчик закреплён.
- В горизонтальной части объекта управления, находится основание на котором расположена подвижная платформа, управляемая программируемым логическим контроллером.
- Платформа, движется на колесных парах, сверху платформы расположены вагоны, в движение платформу приводит двигатель, до двух концевых положений на основании платформы[2].
- На задвижке третьего бункера зафиксирован оптический датчик, для считывания нумерации вагонов, при движении платформы.
При создании стенда были использованы следующие устройства:
- ПЛК (Програмируемый логический контроллер, необходим для управления стендом путем програмирования в виртуальной среде разработки);
- Оптический датчик уровня (для контроля уровня наполнения основного бункера);
- Герконовые датчики (для выставления датчика уровна в одно из 3 положений);
- Индукциоонный датчик (для контроля положения вагона, под основным бункером);
- Шибера (для старта и остановки подачи содержимого бункеров).
Описание работы алгоритма :
Начало работы стенда управляется оператором, а именно розмыканием контакта, и подачи напряжения. Платформа с расположенными на ней вагонами приводится в движение двигателем. Платформа движется до тех пор пока не срабатывает индуктивный датчик считывания нумерации вагонов, установленный непосредственно на задвижде основного бункера, что обеспечивает точное расположение вагона под основным бункером. После срабатывания датчика, платформа останавливается, для погрузки. Процесс погрузки начинается установкой уровня заполнения основного бункера оператором на ПЛК, при помощи оптического датчика в основном бункере. Затем оператор выбирает 1 из дополнительных бункеров и открывает задвижку выбранного бункера, после чего основной бункер наполняется до выставленного уровня, и при его достижении, задвижка закрывается. Оператор открывает задвижку основного бункера, и содержимое высыпается в вагон, после этого задвижка закрывается, и датчик уровня устанавливается в начальное положение. Далее процес повторяется до тех пор, пока количество вагоном меньше 4. При заполнении всех имеющихся вагонов, платформа заезжает в концевое положение, откуда она возвращается включением тумблера в исходное положение.
Монтажная схема имеет вид:
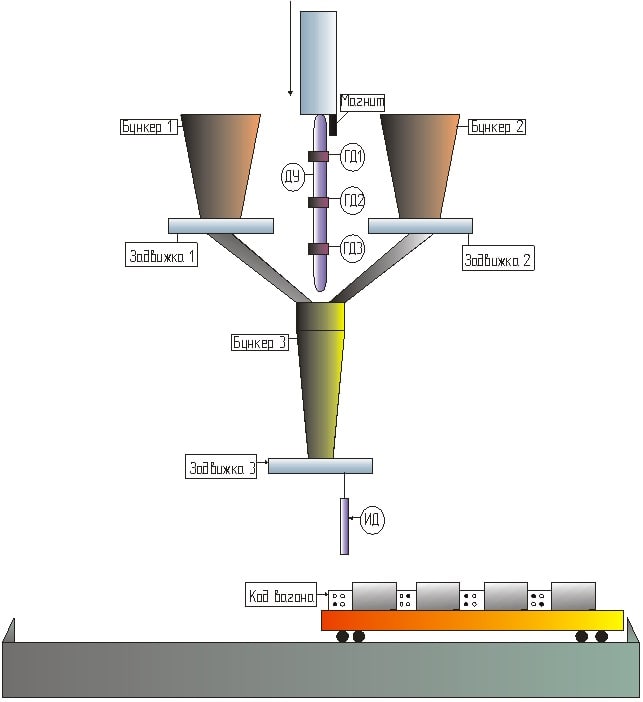
Рисунок 1 – Монтажная схема стенда погрузочного комплекса шахты
Где: ДУ – оптический датчик уровня; ИД – Индуктивынй датчик положения; ГД – Герконовый датчик;
Так же, для стенда была написана программа, и выполнен пульт управления в вертуальной среде разработки CoDeSys, Controller Development System – инструментальный программный комплекс промышленной автоматизации. И реализована полная визуализация технологического процесса которая позволяет не находиться оператору в непосредственной близости к обьекту.

Рисунок 2 – Визуализация технологического процесса
Выводы
Таким образом, разработанное устройство удовлетворяет заданные технические и технологические требования, предъявляемые в данных условиях и может использоваться в учебных целях.