Аннотация
Федотов В. В. Применение нейронных сетей в телекоммуникационных сетях связи Для решения задач, связанных с выбором маршрута, можно использовать модели построения на основе нейронной сети Хопфилда, впервые примененные для решения задачи коммивояжера. Среди положительных качеств модели можно отметить хорошую сходимость и свойство масштабируемости, которые позволяют применять данный метод для работы с большим объемом трафика и сложными сетями. Одно из главных достоинств сети ее способность быстро производить вычисления. Алгоритм управления потоками на одном узле состоит в следующем. В течение некоторого времени гипотетический прибор собирает информацию о состоянии сети. На вход нейронной сети с одним слоем и числом нейронов N поступает некоторая информация, в соответствии с которой сеть находит образ на выходе и устанавливается в состояние равновесия. От анализатора сети поступает информация в закодированном виде: число узлов и каналов, объединяющих эти узлы, узел назначения, количество возможных маршрутов до узла назначения. На выходе такой сети должен образоваться маршрут, зависимый от всех этих факторов.
Мировые тенденции конца 90–х гг. в области телекоммуникаций характеризуются широким внедрением новых технологий, позволяющих не только существенно расширять перечень предоставляемых услуг, но и повышать их качество. Вместе с тем, сети электросвязи становятся все более компьютеризированными. Указанные факторы, определяющие эволюцию сетей электросвязи, в первую очередь обусловлены влиянием заказчиков или конечных пользователей сети и определяют необходимость управления процессами эксплуатации сетей электросвязи в рыночных условиях. Развитие техники автоматической коммутации, взаимное проникновение вычислительной техники в технику связи и наоборот привели к разработке высокоорганизованных динамических систем управления сетями связи, потоками информации и процессами обслуживания заявок абонентов на передачу информации. Такие динамические системы управления обеспечивают устранение или ослабление влияния возникающих неисправностей отдельных элементов сети и изменения во времени потоков информации между абонентами и узлами сети на качество обслуживания заявок абонентов и передачи информации. Например, система управления, обнаружив ухудшение качественных характеристик тех или иных каналов, перестраивает порядок их выбора так, что эти каналы будут заниматься в последнюю очередь. Аналогично может быть построена динамическая система управления, позволяющая уменьшить либо вероятность потерь вызовов, либо время задержки установления соединения, т. е. время нахождения информации (например, данных) в сети за счет выбора оптимального пути ее передачи в условиях, создавшихся в этот момент времени.
Последний по времени всплеск интереса к сетям коммутации каналов имел место в 90–е гг. в связи с появлением существенных технологических изменений в системах управления телефонными сетями, что привело к появлению серии работ по методам динамической маршрутизации в телефонных сетях. Однако основное внимание в этот период уделялось не столько получению новых теоретических результатов, относящихся к вопросам моделирования таких сетей и процессов управления в них, сколько к применению уже имеющихся методов с учетом появившихся новых возможностей по организации управления.
Исходными данными для модели являются: информация о структуре вторичной телефонной сети и входном трафике; организация маршрутизации в сети; критерий оптимизации функционирования сети; наличие ограничений на гарантированные минимальные уровни обслуживания.
Область применения искусственных нейронных сетей постоянно расширяется. В телекоммуникационных системах они находят применение при решении следующих важных задач [1]: управление коммутацией, адаптивная маршрутизация, управление трафиком, оптимальное распределение загрузки каналов сети. Кроме того, перспективным является использование нейросетевых алгоритмов в задачах кодирования и декодирования информации.
Сеть управления (в данном случае) должна отвечать требованиям малой инерционности, умению самостоятельно решать поставленные задачи, иметь большую память (для сетей с большим количеством узлов).
Для решения задачи управления был выбран аппарат нейронных сетей. Нейронные сети – мощный аппарат для имитации процессов и явлений, который предоставляет возможность воспроизводить достаточно сложные зависимости. Нейронные сети позволяют находить решения для задач с высокой размерностью. Другая их особенность – возможность обучения такой сети.
Адаптивная маршрутизация является одной из важнейших задач для телекоммуникационных сетей различного назначения. Эти задачи, связанные с выбором маршрута и планированием работы маршрутизаторов, относятся к классу комбинаторно–оптимизационных задач, не имеющих простых аналитических решений. Кроме того, вычислительные затраты экспоненциально возрастают при увеличении количества узлов в сети. В то же время для решения таких задач можно использовать модели построения на основе нейронной сети Хопфилда, впервые примененные для решения задачи коммивояжера. Большинство последующих работ в этой области так или иначе базируются на использовании таких моделей.
Искусственная нейронная сеть состоит из простейших элементов сети – искусственных нейронов. Модель искусственного нейрона: векторный или скалярный входной сигнал умножается на векторный или скалярный весовой коэффициент, результирующий взвешенный вход является аргументом функции активации нейрона (единичная, логистическая).
Задачей разработчика системы управления маршрутизацией является: выбор сети с определенной технологией, определение набора параметров, которые необходимы для управления, подбор структуры нейронной сети. После определения количества слоев сети и числа нейронов в каждом из них назначается значение весов и смещений, которые минимизируют ошибку решения. Это достигается с помощью процедур обучения. Процесс обучения – подгонка параметров той модели процесса или явления, которая реализуется нейронной сетью. Алгоритмы обучения нейронных сетей аналогичны алгоритмам поиска глобального экстремума функций многих переменных. Алгоритм обучения должен обеспечивать универсальность модели управления маршрутизацией.
Алгоритм управления потоками на одном узле состоит в следующем. В течение некоторого времени гипотетический прибор собирает информацию о состоянии сети. На вход нейронной сети с одним слоем и числом нейронов N поступает некоторая информация, в соответствии с которой сеть находит образ на выходе и устанавливается в состояние равновесия. От анализатора сети поступает информация в закодированном виде: число узлов в сети, число каналов, объединяющих эти узлы, узел назначения, количество возможных маршрутов до узла назначения. На выходе такой сети должен образоваться маршрут в зависимости от всех этих факторов.
Применительно к классической задаче коммивояжера, задача формулируется следующим образом [2]: в нейронной сети из N = n2 нейронов из n!/2n маршрутов выбрать один с наименьшей длиной (состояние каждого нейрона описывается двумя индексами).
Для решения данной задачи составляется функция вычислительной энергии для нейронной сети, предназначенной для решения задачи коммивояжера. Пусть состояние с наименьшей энергией соответствует самому короткому маршруту. В общем виде такая функция для рассматриваемой нейронной сети может иметь следующий вид [3]:
 |
(1) |
где E – искусственная энергия сети; wij – вес от входа нейрона i к входу нейрона j; Yj – выход нейрона j; Ij – внешний вход нейрона j; Tj – порог нейрона j.
Изменение энергии, вызванное изменением состояния j–нейрона, можно вычислить следующим образом:
 |
где δYj – изменение выхода j–го нейрона.
Развитие системы – нахождение из множества такого состояния, в котором энергия достигнет минимального значения.
Однако для рассматриваемой системы функция энергии должна удовлетворять следующим требованиям [4]. Во–первых, она должна поддерживать устойчивые состояния. Во–вторых, из всех возможных решений функция энергии должна поддерживать те, которые соответствуют коротким маршрутам. Этим требованиям удовлетворяет функция энергии вида (при этом Yj = 0,1):
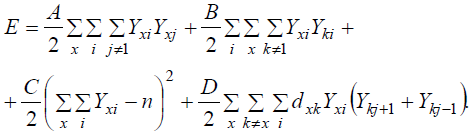 |
(2) |
Первые три члена выражения (2) поддерживают первое требование, четвертый член – второе; A, B, C, D – положительные множители. Первый член равен нулю, если посещается город только один раз, второй член равен нулю, если в каждый момент посещается только один город. Третий член равен нулю, если посещаются все города. Таким образом, при правильно решенной задаче коммивояжера, без учета четвертого члена, функция энергии имеет минимумы во всех состояниях, соответствующих посещению всех городов, причем в каждый момент посещается только один город и каждый город посещается один раз. Все другие состояния имеют более высокую энергию. Короткие маршруты поддерживает четвертый член. В нем индексы i берутся по mod n для того чтобы показать, что i–й город соседствует в маршруте с (n–1)–м и первым. Т. е. Yk,n+j = Ykj. Четвертый член численно равен длине маршрута.
Раскрываем скобки в (2) и приравниваем коэффициенты при квадратичных и линейных членах в полученном выражении и общей формуле:

где u(k) – вектор входных сигналов, x(k + 1) – вектор выходных сигналов, k = 0,1,.. – дискретное время.
Определяем матрицу связей и внешние взаимодействия:
 |
(3) |
где δij =1, если i=j, в противном случае δij = 0. Кроме того, каждый нейрон имеет смешанный вес Ixi=Cn.
Первый член в (3) задает связи нейронов в каждой строке, второй – внутри каждого столбца, третий и четвертый – глобальные связи. И в (2) и в (3) три первых члена отвечают за общие ограничения для любой задачи коммивояжера и приводят нейронную сеть в устойчивое состояние. Четвертый член управляет тем, какое из n!/2n возможных различных финальных состояний соответствует самому короткому маршруту.
Рассмотрим другую постановку задачи [3]. Выбор маршрутов, максимизирующих степень узла в сети, предоставляет возможность планирования работы сети таким образом, чтобы время выполнения было бы минимальным. Степень узла определяется как сумма всех потоков, поступающих и исходящих от узла. Критерий качества работы, который выбирается для задач маршрутизации, должен отражать цели, связанные с соответствующей задачей, составления плана работы линий связи.
Пусть задана сеть, состоящая из нескольких узлов и линий связи, соединяющих эти узлы. Считаем, что трафик в такой сети примерно одинаковый. Однако при приближении к ЧНН (час наибольшей нагрузки) нагрузка на узлы извне лавинообразно возрастает, а внутри сети имеются маршруты, по которым может быть распределен приходящий трафик. Требуется выбрать маршрут между парой источник – приемник с таким расчетом, чтобы минимизировать критерий качества работы.
Показатель качества работы должен согласовываться со структурой нейронной сети Хопфилда. Итак, по аналогии с вышерассмотренной моделью
показатель, называемый энергией перегрузки
, задается формулой:

где Pij j–ый маршрут между i–ой парой источник – приемник,  – число узлов, которые совместно используют маршруты Pij и Pkl,
– число узлов, которые совместно используют маршруты Pij и Pkl,

Np(i) – число вариантов маршрутов, определенных между i–й парой источник – приемник.
Нейронная сеть эволюционирует от некоторого начального состояния до состояния равновесия функции энергии Ляпунова, которая составляется по аналогии с (1):

где Tij,kl – вес соединения между нейронами ij и kl; Iij – ток смещения, прикладываемый к нейрону.
Задача имеет целый ряд ограничений, которыми можно пренебречь, если ввести другие на целевую функцию. Учитывая эти обстоятельства, можно сказать, что конечное состояние зависит от начального.
Список использованной литературы
1. Галушкин А. И. // Зарубежная радиоэлектроника. 1995. № 6. С. 4 –21.
2. Комашинский В. И., Смирнов Д. А. Нейронные сети и их применение в системах управления и связи. М., 2002.
3. Комашинский В. И., Смирнов Д. А. Внедрение в нейро–информационные технологии. СПб., 1999.
4. Уоссерман Ф. Нейрокомпьютерная техника: Теория и практика. М., 1990.