
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Обзор исследований и разработок
- 3.1 Обзор зарубежного опыта
- 3.2 Обзор отечественных разработок
- 4. Исследование ОС Android для разработки программного модуля
- Выводы
- Список источников
Введение
Целью магистерской диссертации является анализ разработанного ранее программного модуля системы мониторинга состояния характеристик движения транспортных средств, а также исследование современных интеллектуальных транспортных систем. Программным модулем является мобильное приложение на операционной системе Android, в котором используются современные технологии беспроводной передачи данных – такие как Bluetooth и GPRS. Он предназначен для получения и отображения показаний датчиков системы сбора и обработки информации об окружающей среде, а также для работы с полученными данными и возможности их сохранения. Программный модуль в составе системы сбора и обработки информации об окружающей среде создан для применения в области компьютерного мониторинга.
1. Актуальность темы
В нынешних условиях сложно представить себе человека без мобильного телефона, планшетного компьютера или любого другого портативного устройства. Каждый из нас привык к тому, что смартфон всегда под рукой. В последние годы телефон предназначен не только для общения, но и содержит большое количество полезных функций, таких как, например, доступ в интернет. Мобильные устройства стали выполнять обширный диапазон вычислительных общих задач, эти устройства могут стать новым поколением персональных компьютеров. Операционная система Android является одной из самых популярных платформ для мобильных устройств. Стоит отметить, что это не дешёвый аналог продукта от Apple, как полагают определенные эксперты, а альтернатива и главный конкурент с высокой динамикой развития. Данная платформа разработана на ядре Linux и обладает гибкостью настроек системы, которая весьма успешно сочетается с удобным инструментарием, что является идеальным решением для создания новых приложений.
Одной из отличительных черт операционной системы Android является тот факт, что она в значительной степени интегрирована с фирменными сервисами компании Google и непосредственно благодаря специальным библиотекам, созданными данной компанией Android дает возможность сторонним разработчикам программного обеспечения самостоятельно создавать приложения для нее. [1]
2. Цель и задачи исследования, планируемые результаты
Цель и задачи исследований – оптимизировать вычислительные ресурсы программного модуля системы сбора и обработки информации об окружающей среде, а также вывести закономерности и тенденции развития.
Идея работы заключается в проведении научного исследования при использовании мобильного устройства под управлением ОС Android для получения актуальных показаний датчиков окружающей среды
Основные задачи исследований. Для достижения поставленной цели в работе уже решены следующие задачи:
- Были рассмотрены вопросы, касающиеся структуры и архитектуры операционной системы Android, проанализированы и изучены принципы функционирования и взаимодействия программной и аппаратной частей ОС.
- Рассмотрены различные варианты обмена данными с использованием современных технологий при помощи персональных сетей. Выбраны и применены оптимальные варианты сопряжения.
- Разработан программный модуль системы беспроводного оперативного мониторинга, выполненный в качестве мобильного приложения под ОС Android, которое включает в себя использование ведущих технологий персональных беспроводных сетей.
Объект исследования - ОС Android, система сбора и обработки информации об окружающей среде.
Предмет исследования - разработка мобильного приложения с возможностью использования в качестве программного модуля системы сбора и обработки информации об окружающей среде.
Методология и методы исследования. В процессе создания магистерской диссертации используются различные методы сравнительного и статистического анализа, на основе которых и делается вывод о целесообразности использования данных программного модуля для системы сбора и обработки информации об окружающей среде.
Информационной базой исследования были работы отечественных и иностранных разработчиков программного обеспечения таких, как Голощапов, Олифер, Дэрси, Гейнер и др., интернет источники, а также материалы научных конференций и материалы технического характера. [2], [3]
3. Обзор исследований и разработок
Глобальным транспортным сообществом решение заключается в разработке уже не систем управления автотранспортом, а транспортных систем, в которых способы связи,
управления и контроля
изначально интегрированы в транспортные средства и объекты инфраструктуры, а способы управления (принятия решений), на базе получаемой в реальном времени информации,
доступны не только транспортным операторам, но и всем пользователям автотранспорта. Задача решается методом создания интегрированной системы: люди - транспортная
инфраструктура - транспортные средства, с максимальным внедрением последних информационно-управляющих технологий. Эти продвинутые
системы и стали называть
интеллектуальными. [4]
В последнее 10 лет словосочетание Интеллектуальные Транспортные Системы
(Intelligent Transport Systems) и соответствующие аббревиатуры - ИТС, ITS - стали часто
фигурировать в
стратегических, политических и программно-целевых документах развитых государств.
Область продвижения ИТС варьируется от решения задач общественного автотранспорта, значительного повышения безопасности дорожного движения, ликвидации заторов в транспортных сетях, увеличения производительности интермодальной транспортной системы (включая автомобильный, железнодорожный, воздушный и морской транспорт) до экологических и энергетических проблем.
Одно из ведущих направлений развития ИТС, которое усердно продвигается последние 15 лет - осуществление концепции интеллектуального автомобиля. Работает международная
программа Транспортные средства повышенной безопасности
. Уже первые опыты использования бортовых интеллектуальных систем показали, что они могут сократить
количество
ДТП на 40%, а число ДТП с летальным исходом на 50%. [5]
3.1 Обзор зарубежного опыта
Практическое становление крупномасштабных проектов ИТС берет начало в середине 1980-х гг. в Европе, США и Японии, когда стали доступны для бизнес-приложений персональные компьютеры, технологии космического позиционирования и сотовая связь.
Возможности ИТС наглядно продемонстрированы в системах PAT (Personal Automated Transport: — персональный автоматический транспорт), PRT (Personal Rapid Transit). Это системы общественного автотранспорта, которые обеспечивают постоянную транспортировку пассажиров по их требованию благодаря автоматическим транспортным средствам без водителя. Система PRT использует свою транспортную сеть, которая имеет возможность быть сконструированной в виде дорожного полотна с направляющими устройствами, рельсового пути или монорельса, а также в виде комбинации этих устройств. Пользователь на остановочном пункте выбирает пункт назначения, и система предоставляет свободный вагон или направляет попутный. Вагон с учетом топологии сети автономно выбирает кратчайший путь до пункта назначения. Вся система имеет централизованное компьютерное управление на уровне распределения вагонов и обеспечения безопасности. [6]
Новейшая система PRT в 2009 г. введена в строй в лондонском аэропорту Хитроу, где она связывает пятый, наиболее современный, терминал с удаленными автостоянками. Это первая полностью коммерческая система PRT в мире.
Велущие промышленные автогиганты стараются не отставать и уже серьёзно взялись за установку системы автопилота на серийные модели автомобилей. В данный момент ведутся проверки и тестирования функций, и если полагаться на заявления представителей автоконцернов, то результаты превосходят все ожидания.
Ярким представителем такой системы является Traffic Jam Assist, которая была создана разработчиками Ford на базе исследовательского комплекса в Германии. Система
помощи в пробках
дает возможность автотранспорту без помощи водителя двигаться в тесных рядах машин, выполнять остановку, если это необходимосто, и начинать
разгонятся, когда впереди идущие автомобили свободно двигаются. Кроме того, Traffic Jam Assist способен управлять автомобилем на поворотах и изгибах дороги. При этом
водитель не прилагает никаких усилий для контроля происходящей ситуации, он может себе позволить совершенно не касаться узлов управления. Traffic Jam Assist
функционирует по принципу двух давно известных автолюбителям систем: круиз-контроля (система анализирует информацию о внешних событиях с радара и принимает решение о
необходимой скорости) и программы Lane Assist (не допускает пересечение дорожной линии и вносит поправки в направление движения автомобиля, подруливая в нужном
направлении). Эта система автопилотирования позволит машине придерживаться постоянной скорости в 50-60 км/ч без участия водителя. Но инженеры предупреждают, что
владельцы авто не должны полностью расслабляться за рулём, участие человека всегда необходимо.
Компания Volkswagen приняла решение не отставать и огласила об успехах в разработке системы Temporary Auto Pilot. Эта модель системы автопилотирования позволяет
автомобилю переходить на самоуправление не только в пробках, но и на дорогах с высоким скоростным режимом. Временный автопилот
по механизмам действия практически
идентичен Traffic Jam Assist, но несколько новаторств от Volkswagen позволяют включать автопилот даже на скорости 130 км/ч. Компания Google выполняет тестирование
автомобиля-робота, который оборудован комплексом встроенных карт и навигаций. Такой автомобиль способен передвигаться по дорогам даже без присутствия водителя в салоне.
[7]
3.2 Обзор отечественных разработок
В России в области ИТС наибольшее развитие получили системы управления дорожным движением. Их развитие на принципах ИТС позволяет перейти от управления отдельными светофорными объектами к управлению движением на автомобильных дорогах, зонах улично-дорожной сети или в целом движением в городе. Для реализации сервисов ИТС в данном случае создаются АСУ автомагистралью, зональные АСУ или АСУ дорожного движения (ДД) города. В последних двух случаях более действенно внедрение сетевых адаптивных методов управления дорожным движением. [8]
Одной из организаций, которые разрабатывают похожие системы является компания ITV. Это российский разработчик программного обеспечения для систем безопасности и видеонаблюдения.
Компания ITV видит современную профессиональную систему безопасности, как открытую информационную платформу, построенную по принципу операционной системы, с набором приложений для решения самых различных задач. Компания рассматривает систему безопасности как инфраструктуру, которая объединяет все оборудование в единый организм и обеспечивает его согласованную работу, применяя современные алгоритмы интеллектуальной обработки информации.
В линейке продуктов ITV есть профессиональные системы для компаний крупного масштаба, использующие принцип открытой платформы. Примером такой системы является
Авто-Интеллект
.
Задача контроля дорожно-транспортной обстановки сводится, фактически, к наблюдению за большим количеством быстро движущихся объектов. Человек плохо приспособлен к такому виду рутинной деятельности, быстро приходит утомляемость и о полном контроле над дорожной ситуацией не может идти и речи.
Авто-Интеллект
– решение для интеллектуального контроля дорожно-транспортной обстановки и распознавания автомобильных номеров.
В основе системы три интеллектуальных модуля:
- модуль распознавания автомобильных номеров
- модуль определения характеристик транспортных потоков
- модуль Радар
Авто-Интеллект
позволяет собирать статистику по транспортным потокам, помогает сотрудникам ГИБДД обнаруживать случаи нарушения правил дорожного движения,
автоматически определяет наличие пробок. Может использоваться совместно с системой контроля доступа для автоматизированного контроля проезда транспортных средств. [9]
Что касается автомобилей с системой автопилота, то развитием этого направления занимается, к примеру, компания Яндекс
. Изначально испытания проводились на
полигонах,
но уже в начале 2018 года состоялись тесты в реальных условиях, на заснеженных московских улицах, а в июне беспилотный Prius проехал почти 800 км от Москвы до Казани
за 11 часов — результат, сопоставимый с реальным водителем. [10]
4. Исследование ОС Android для разработки программного модуля
Если представить компонентную модель Android в виде некоторой иерархии (рисунок 1), то в самом низу, как самая фундаментальная и базовая составляющая, будет располагаться ядро операционной системы (Linux Kernel). Часто компонентную модель ещё называют программным стеком. Действительно, это определение тут уместно, потому что речь идет о наборе программных продуктов, которые работают вместе для получения итогового результата. Действия в этой модели выполняются последовательно, и уровни иерархии также последовательно взаимодействуют между собой. [11].
Над уровнем Linux находится уровень инфраструктуры приложения, содержащий виртуальную машину Dalvik и некоторые библиотеки AndroidRunTime(уровня среды исполнения). Dalvik использует формат DalvikExecutable (*.dex), оптимизированный для минимального использования памяти приложением. Это обеспечивается такими базовыми функциями ядра Linux, как организация поточной обработки и низкоуровневое управление памятью.
В состав Android RT входит набор библиотек ядра, которые предоставляют большую часть функциональности библиотек ядра языка Java.
Платформа Android включает в себя набор библиотек, используемых различными компонентами ОС. Для разработчиков доступ к их функциям реализован через использование ApplicationFramework. Он позволяет задействовать всю мощь API, используемого в приложениях ядра. Архитектура построена таким образом, что любое приложение может использовать уже реализованные возможности другого приложения при условии, что последнее откроет доступ на использование своей функциональности.
На вершине находится уровень приложений. Сюда входит комплект базовых приложений: клиенты электронной почты и SMS, календарь, различные карты, браузер, программа для управления контактами и другие. [12]
Рисунок 1 – Архитектура операционной системы Android
(анимация: 6 кадров, цикл повторений: бесконечно, 128 килобайт)
Прежде, чем приступить к использованию программного модуля системы мониторинга необходимо выполнить сопряжение с аппаратной частью системы. Исследовав
различные технологии и варианты подключений беспроводных персональных сетей [13], было принято решение использовать в качестве сопряжения
организацию PAN–Bluetooth.
Выполнить сопряжение довольно просто, для этого всего лишь необходимо перейти во вкладку Сопряжение
и после системного запроса на включение Bluetooth нажать
кнопку
Подключить устройство
. После чего приложение само подключиться к системе датчиков и нам даже не стоит выбирать ее из предложенного списка. Этот процесс можно
наблюдать на рисунке 2.
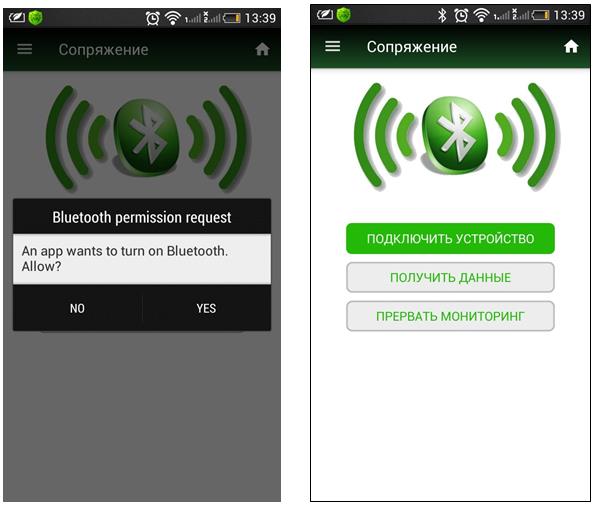
Рисунок 2 – Процесс сопряжения с системой датчиков
В результате удачного сопряжения с системой датчиков, кнопки Получить данные
и Прервать мониторинг
станут активными. После того, как пользователь нажмет
на кнопку,
программа начинает посылать запросы для получения показаний датчиков. Через установленный Bluetooth-канал отправляется определённый код с периодическим интервалом,
затем будет получен ответ от системы датчиков и во вкладке Мониторинг
нашего приложения будут выданы актуальные показания, кроме
того появится сопроводительная надпись, информирующая нас об этом.
Выводы
Результатом выполнения одной из составных частей магистерской работы является разработанный программный модуль системы беспроводного оперативного мониторинга, выполненный в виде мобильного приложения для устройств, работающих под управлением операционной системы Android. Разработанное приложение, является важным звеном в дальнейшем проектировании системы автоматического пилотирования автотранспортными средствами.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: май 2020 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Блог Марка Синната [электронный ресурс] // Wordpress: [сайт]. [2005-2017]. - Режим доступа: https://markfaction.wordpress.com/2012/07/15/stack-based-vs-register-based-virtual-machine-architecture-and-the-dalvik-vm/
- Гейнер, Д. Беспроводные сети. – Вильяме, 2005. – стр.90
- Олифер, В.Г. Компьютерные сети. Принципы, технологии, протоколы / В.Г. Олифер, Н.А. Олифер. – Питер, 2010. – стр.285
- Иванова И. А. Журнал о цифровом видеонаблюдении, IP-решениях, системах безопасности. // Выпуск №3, 2009. - стр.53
- Intelligent Transport Systems in action. Action Plan and Legal Framework for theDeployment of ITS in Europe / Directorate-General for Mobility and Transport ; EuropeanCommission. Luxembourg : Publications Office of the European Union, 2011.
- Benefits of Intelligent Transportation Systems Technologies in Urban Areas: A LiteratureReview. Final Report // Center for Transportation Studies of Portland State University. 2005.April.
- Колодийчук Андрей для блога
ByCars.ru
[электронный ресурс] // ByCars.ru: [сайт]. [2012-2019]. - Режим доступа: https://yandex.ua/turbo?text=https%3A%2F%2Fbycars.ru%2Fjournal%2Fsistemi-avtopilota-dlya-avtomobiley_1760&d=1 - Аникина Б. А. Логистика: /Под ред. Б.А. Аникинаo. — М.: ИНФРА-М, 2007., стр.53
- Кабашкин И. В. Интеллектуальные транспортные системы: интеграция глобальныхтехнологий будущего // Транспорт Российской Федерации. 2010. № 2 (27). - стр. 34—38.
- Беспилотные автомобили: Россия, держись! [электронный ресурс] // auto-rambler: [сайт]. [2018]. Режим доступа: - https://auto.rambler.ru/roadaccidents/41357549-bespilotnye-avtomobili-rossiya-derzhis/
- Голощапов А.Л. Google Android: программирование для мобильных устройств. / А.Л.Голощапов – М. : BHV Санкт-Петербург, 2011. – стр.1549
- Медникс З. Программирование под Android / З. Медникс, Л. Доронин, Б. Мик, М.Накамура. – Питер, 2013
- Уваров Р.В. Телекоммуникационные сети и технологии / Р.В. Уваров, В.К. Скляренко, С.И. Зуев, В.Г. Гулян, А.П. Улеев, А.А. Гринь. – Харьков, 2006. – стр.285