Аннотация
В работе выполнен анализ актуальности вопроса и рассмотрены проблемы, связанные с обеспечением безопасности движения. Выбрана аппаратная платформа для реализации поставленной задачи. Также были исследованы основные современные технологии для организации беспроводного обмена информацией с использованием персональных сетей. Разработана программная модель фрагментов системы интеллектуализации транспортных средств и обозначены направления дальнейшего исследования.
Введение
Дорожное движение в настоящее время следует рассматривать как одну из самых сложных составляющих социально экономического развития городов и регионов, что приводит к необходимости использования самых современных технологий сбора и обработки информации об окружающей среде с целью повышения безопасности движения и внедрения различных систем автопилотирования транспорта.
Ведущие производители транспортных средств занимаются исследованиями в области систем управления транспортом, в которых средства связи, управления и контроля изначально встроены в транспортные средства и объекты инфраструктуры, а возможности управления (принятия решений) на основе информации, получаемой в реальном времени, доступны не только транспортным операторам, но и всем пользователям транспорта [1].
В последнее 10 лет словосочетание «Интеллектуальные Транспортные Системы» (Intelligent Transport Systems) и соответствующие аббревиатуры – ИТС (ITS) - стали обычными в стратегических, политических и программно-целевых документах [1].
Сфера применения ИТС варьируется от решения проблем существенного повышения безопасности дорожного движения, общественного транспорта, ликвидации заторов в транспортных сетях до энергетических и экологических проблем.
Одним из основных направлений развития ИТС в США, Европе и Японии, которое активно продвигается последние 15 лет, является реализация концепции интеллектуального автомобиля. Работает международная программа «Транспортные средства повышенной безопасности». Уже первые опыты использования бортовых интеллектуальных систем показали, что они способны уменьшить число ДТП на 40%, а число ДТП со смертельным исходом на 50% [1].
В настоящее время уже находятся в продаже или проходят полигонные испытания более десяти типов бортовых ИТС:
- система удержания автомобиля на полосе;
- система поддержания дистанции в плотном транспортном потоке;
- система оповещения об усталости (дремоте) водителя;
- система удержания автомобиля при движении по кривой;
- система предотвращения боковых столкновений;
- система обнаружения мотоциклистов и др.
Бортовые ИТС реализуют несколько функции: оказывают водителю помощь в предвидении дорожной обстановки; побуждают его к действиям по предотвращению опасной ситуации; снижает утомляемость водителя, анализируя часть параметров самостоятельно [1].
Сегодня ИТС-оборудование устанавливается как штатное на всех автомобилях высокого и среднего класса [1].
Постановка задачи
Целью работы является разработка фрагментов системы интеллектуализации транспортных средств посредством установки необходимого оборудования. Идея разработки заключается в создании системы сбора данных окружающей среды, анализа и в, случае необходимости, передачи данных пользователю. Система принимает данные, анализирует и производит воздействие на управляемый объект (транспортное средство). Воздействие может быть как непосредственно изменение скорости, траектории и других параметров автотранспортного средства, так и просто визуализация параметров движения, текущего состояния транспортного средства, дорожной ситуации и прочее. В современных условиях трудно представить себе человека без мобильного телефона, планшетного компьютера или любого другого портативного устройства. Портативные устройства стали выполнять широкий спектр вычислительных общих задач, поэтому было принято решение добавить возможность вывода информации в мобильное приложение.
Платформой для программного обеспечения была выбрана операционная система Android, которая является одной из самых популярных платформ для мобильных устройств. Стоит отметить, что это не дешёвый аналог продукта от Apple, как считают некоторые специалисты, а альтернатива и основной конкурент с высокой динамикой развития. Данная платформа разработана на ядре Linux и обладает гибкостью настроек системы, которая очень удачно сочетается с удобным инструментарием, что является идеальным решением для создания новых приложений.
Для практической реализации проекта был проанализирован рынок современных аппаратных платформ. Параметрами выбора выступили стоимость и энергопотребление. Были рассмотрены следующие платформы: Arduino; Raspberry; Intel Galileo.
Каждая из выше перечисленых платформ обладает своими преимуществами и недостатками. Так, Raspberry и Intel Galileo имеют возможность запуска полноценных операционных систем, что подразумевает высокопроизводительные процессоры с высоким энергопотреблением и ценой. Arduino же, в свою очередь, имеет микроконтроллер с частотой 16 Мгц и сравнительно небольшую стоимость. Поэтому была выбрана именно Arduino.
Разработка системы
Разрабатываемая система интеллектуализации транспортных средств предназначена для определения параметров окружающей среды (температура, влажность, освещение) и передачи на мобильное устройство с помощью беспроводной технологии Bluetooth.
Система сбора и обработки информации об окружающей среде включает в себя следующие устройства (рис.1).

Рисунок 1 – Структурная схема системы
Устройство обработки данных служит для обработки запросов с блока связи и считывание данных с датчиков. Датчик температуры выполняет измерения температуры вне помещения с целью дальнейшего принятия решений о необходимости воздействия на транспортное средство. Воздействие заключается во внешнем управлении системами автомобильного транспорта, которое позволит избежать аварийных ситуаций на дорогах. Кроме показаний температуры необходимы также данные о влажности. В совокупности влажность и температура позволят, в дальнейшем, судить о наличии или отсутствии скользкого дорожного полотна.
Рассмотрим фрагмент программы опроса датчика влажности и температуры воздуха.
//Блок инициализации и начальной предустановки цифровых входов устройства
void setup()
{
Serial.begin(57600);
pinMode(13,OUTPUT);
pinMode(12,INPUT);
digitalWrite(12,HIGH);
digitalWrite(13,HIGH);
}
//Блок получения информации от датчика
void loop()
{
int t = sens.readTemperature(12); //Вызов функции измерения температуры воздуха
int h = sens.readHumidity(12); //Вызов функции измерения влажности воздуха
delay(2000);
}
Датчик расстояния в нашей системе используется для определения дистанции безопасности (рис.2). Данный параметр определяет расстояние к движущемуся впереди транспортному средству. В случае нарушения безопасной дистанции, система уведомляет пользователя о необходимости увеличения дистанции.
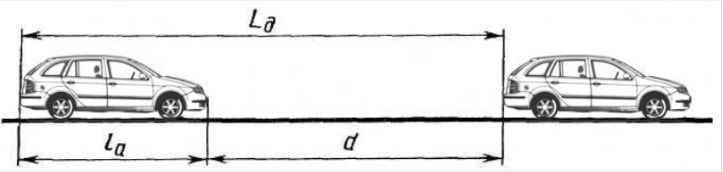
Рисунок 2 – Схема определения дистанции безопасности с учетом динамического габарита автомобиля: Lд – динамический габарит автомобиля; Lа – длина автомобиля; d – дистанция безопасности
Дистанцию безопасности можно определить как сумму тормозного пути и зазора безопасности, принимаемого равным 2-3 м [2].

Тормозной путь находится по формуле [2]:
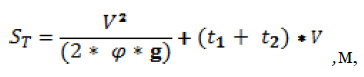
где
- V – скорость, км/ч;
- φ – коэффициент сцепления;
- g – ускорение свободного падения, g = 9,81 м/с2;
- t1 – время реакции водителя, в расчетах часто принимают 0,8 с;
- t2 – время срабатывания тормозного привода.
Блок связи служит для осуществления обмена информацией между устройством обработки данных и устройством тестирования. Для получения данных будет применена технология Bluetooth, т.к. данный способ связи обладает низким энергопотреблением. Кроме того, в нынешнее время Bluetooth стал применяться не только в смартфонах и планшетах, но и смарт-часах и прочих многофункциональных девайсах, работающих под операционной системой Android, что позволит в дальнейшем обеспечить стабильную поддержку приложения при смене устройства.
Фрагмент кода программы сопряжения с Bluetooth-устройством.
// Создание списка сопряженных Bluetooth-устройств
private void setup() {
Set BluetoothDevice pairedDevices = bluetoothAdapter.getBondedDevices();
if (pairedDevices.size() > 0) { // Если есть сопряжённые устройства
pairedDeviceArrayList = new ArrayList>();
// Добавляем сопряжённые устройства - Имя + MAC-адресс
for (BluetoothDevice device : pairedDevices)
{
pairedDeviceArrayList.add(device.getName() + "\n" + device.getAddress());
}
Во время инициализации системы происходит очистка памяти устройства от старых (неактуальных) данных.
Считывания данных с датчиков подразумевает последовательное обращение к каждому из датчиков и сохранение их показаний в переменную. Сохранения данных выполняется по принципу циклического сохранения данных в память.
Ожидание запроса на считывание информации подразумевает получение системой внешнего прерывания с последующей инициализацией процедуры передачи информации.
Передача данных представляет собой обработку запроса с блока связи и использование одного из следующих вариантов:
- передача актуальной информации, считанной с датчиков;
- инициализация процедуры считывания данных из памяти и передачи информации блоку связи.
Процедура очистки памяти вызывается в случае заполнения всего пространства памяти, либо в случае внешнего прерывания, во время тестирования разрабатываемой системы.
Таким образом, при слаженной работе всех блоков системы, пользователь всегда имеет возможность получать актуальную информацию о состоянии окружающей среды.
Выводы
В ходе разработки системы интеллектуализации транспортных средств были решены следующие задачи:
- Выбрана аппаратная платформа для разрабатываемой системы, проведено исследование различных типов существующих датчиков измерения температуры, влажности, освещения и расстояния.
- Разработан и программно реализован алгоритм опроса датчиков и передачи данных на устройство тестирования.
- Разработан программный модуль системы интеллектуализации транспортных средств, выполненный в качестве мобильного приложения под ОС Android, которое включает в себя использование ведущих технологий персональных беспроводных сетей.
В дальнейшем планируется расширение возможностей уже разработанной системы путем добавления нового функционала. Имеет смысл обеспечить передачу данных на web-ресурс для того, чтобы каждый из владельцев приложения смог поделиться полученной информацией и в дальнейшем была возможность разработать платформу, которая на основе собранной базы данных информации могла бы прогнозировать тот или иной показатель.
Литература
- Козлов Л. Н., Урличич Ю. М., Циклис Б. Е. О концептуальных подходах формирования и развития интеллектуальных транспортных систем в России // Журнал «Транспорт Российской Федерации» №3-4 (22-23) 2009. С 30-35 URL: http://www.rostransport.com/transportrf/pdf/22/30-35.pdf.
- Тарасик В. П. Теория движения автомобиля // Теория движения автомобиля: Учебник для вузов. — СПб. БХВ-Петербург, 2006. — 478 с.: ил..
- Николаенко Д. В. Объектная модель интеллектуальной системы управления транспортом / Д. В. Николаенко, О. А. Плешкова // II Международная научно-практическая конференция. «Современные тенденции развития и перспективы внедрения инновационных технологий в машиностроении, образовании и экономике» (Азов, 19 мая 2015 г.). Ростов Н/Д, ДГТУ, 2015. С. 10-14.