Нейросетевая система отслеживания и распознавания объектов в видеопотоке
Автор: М.В. Ляшов, А.Н. Береза, А.М. Бабаев, С.А. Коцюбинская Источник: Современные наукоемкие технологии. – 2018. – № 12 (часть 1) – С. 102–107,[Ссылка]
Аннотация
Данная статья посвящена разработанной нейросетевой системе отслеживания объектов в видеопотоке. Предлагаемый алгоритм позволяет в режиме реального времени определять местоположение целевого объекта в текущем кадре видеопотока. Для отслеживания системе достаточно предоставить текущий и преды- дущий кадры видео, а также положение целевого объекта на предыдущем кадре. Система предварительно не обучена для отслеживания определенного объекта – целевой объект определяется при запуске системы. Для повышения точности и надежности системы были использованы как методы отслеживания объектов, так и методы распознавания образов. Оценка смещения объекта от кадра к кадру была реализована на основе метода Лукаса – Канаде и медианного фильтра. Распознавание объекта осуществляется с помощью свёрточной нейронной сети, в частности, архитектуры MobileNet. В работе приведены результаты экспериментальных исследований на основе четырех видеофайлов. Итоги экспериментов говорят о том, что предлагаемая ком- бинация технологий распознавания и отслеживания объектов позволяет решить проблему потери целевого объекта при его исчезновении или частичном перекрытии другим объектом. Кроме того, разработанный алгоритм инвариантен по отношению к форме объекта и изменению освещенности среды.
Ключевые слова: распознавание образов, отслеживание объектов, компьютерное зрение, оптический поток, свёрточные нейронные сети, OpenCV, Tensotflow
В эпоху больших данных бурный рост переживает область компьютерного зрения. Компьютерное зрение позволяет решать различные задачи, одной из которых является отслеживание движущихся объектов в видеопотоке.
Главными требованиями к системам отслеживания объектов в видеопотоке являются: высокая точность обнаружения перемещений объекта и возможность обработки последовательности кадров в режиме реального времени (более 10 кадров в секунду).
В данной работе представлена интеллектуальная система отслеживания произвольных объектов в видеопотоке. Разработанная система не является предварительно обученной для отслеживания каких-либо конкретных объектов, а позволяет определять целевой объект при запуске.
Цель исследования заключалась в разработке алгоритма отслеживания объектов в видеопотоке, инвариантного по отно- шению к свойствам объекта (цвет, форма и т.д.) и среды (например, освещение). Также в работе алгоритма учтены возможные потери отслеживаемого объекта вследствие его выхода из поля зрения камеры или пере- крытия другим объектом. В этом случае от- слеживаемый объект может быть повторно обнаружен автоматически.
Современные методы отслеживания объектов в видеопотоке. Наиболее популярными методами отслеживания объектов в видеопотоке являются алгоритмы:
- Online Boosting Tracker [1] – один из первых алгоритмов отслеживания объектов, имеющий высокую точность отслежива- ния. Основан на онлайн-версии алгоритмаAdaBoost, использующего для поиска объ- екта каскад Хаара.
- MIL Tracker (Multiple Instance Learn- ing Tracker) [2] является развитием идеи обучения с учителем и алгоритма Online Boosting Основное отличие заклю- чается в том, что в данном случае в качестве положительного примера рассматривается не только текущее местоположение объек- та, но и другие области, содержащие его.
- KCF Tracker (Kernelized Correlation Filters Tracker) [3] – KCF основывается на идеях двух предыдущих алгоритмов, одна- ко за счет использования математических свойств перекрывающихся областей по- ложительных примеров происходит значи- тельное увеличение быстродействия при более простой реализации.
Недостатком описанных выше методов является неспособность повторного обнаружения объекта в случае его потери.
Предлагаемое решение. Разработанный алгоритм обеспечивает возможность отслеживания передвижений объекта в видеопотоке при его потере из-за перекрытия другим объектом или исчезновения из поля зрения камеры. Расположение объекта на изображении задается ограничительным окном – это прямоугольная область, содержащая фрагмент изображения с отслеживаемым объектом.
В качестве входной информации алгоритму необходимо предоставить текущий кадр видеопотока и ограничительное окно на предыдущем кадре. На выходе алгоритма будут получены координаты ограничительного окна, соответствующего положению объекта на текущем кадре видеопотока.
Блок-схема интеллектуальной системы отслеживания объектов в видеопотоке представлена на рис. 1.
Система включает четыре компонента:
- Алгоритм отслеживания (трекер) позволяет оценивать смещение ограничительного окна от предыдущего кадра к текущему кадру. Он адаптивен к небольшим изменениям освещения и внешнего вида объекта. При этом предполагается, что данный компонент может ошибаться в случае частичного или полного перекрытия отслеживаемого объекта. Исходя из этого требуется дополнительный компонент, корректирующий работу алгоритма отслеживания.
- Алгоритм распознавания (детектор) является корректирующим компонентом системы. Его работа не зависит от перекрытия или исчезновения объекта. Детектор обнаруживает объект при его появлении в кадре и при необходимости корректирует или повторно инициализирует трекер, работая с ним параллельно. Для повышения точности детектора после каждого кадра необходимо обновлять его знания об отслеживаемом объекте и об объектах, расположенных на фоне.
- Объединение результатов предоставляет обобщенный вариант ограничительного окна, полученный на основе результатов детектора и трекера. Если ни трекер, ни деектор не выдают ограничительных окон, то считается, что объект потерян. В противном случае для каждого из ответов на основе NCC вычисляется параметр, который определяет величину подобия ограничительного окна и положительных примеров обучающей выборки (описано ниже). Система возвращает то ограничительное окно, которое обладает наибольшим значением этого параметра.
- Алгоритм обучения – это компонент, который выполняет обучение детектора для достижения более высокой точности. На каждой итерации алгоритма обучение анализирует выход трекера и детектора, оценивает ошибки, совершаемые детектором, и обновляет детектор, чтобы избежать этих ошибок в будущем.
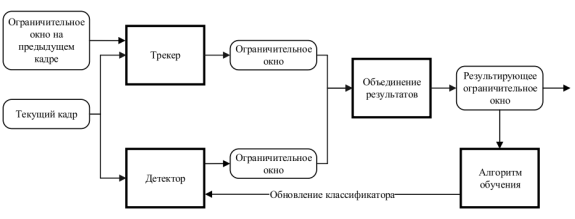
Рисунок 1 – Блок-схема системы
Для оценки смещения объекта между кадрами были протестированы следующие алгоритмы: фильтр Калмана, алгоритм сдвига среднего (Mean-Shift) [4], алгоритм непрерывно адаптирующегося сдвига (CamShift) [5], алгоритм Лукаса – Канаде (Lucas-Kanade) [6]. При анализе особое внимание уделялось вычислительной сложности алгоритмов, а также тому, насколько эффективно они работают в условиях меняющегося размера, больших сдвигов и частичного перекрытия объекта. По результатам тестирования выбор был сделан в пользу метода Лукаса – Канаде в его пирамидальном варианте, который является компромиссом в отношении быстродействия и надежности.
При использовании метода Лукаса – Канаде в большинстве случаев имеются ошибочно найденные точки. Их количество зависит от величины смещения и изменения условий среды между кадрами. Для отсеивания ошибочных точек может была применена двухуровневая фильтрация, использованная в алгоритме медианного потока (Median-Flow tracker) [7].
На первом уровне выполняется фильтрация на основе нормализованной корреляции (Normalized-Cross Correlation, далее – NCC), которая является одним из компонентов технологии сопоставления шаблона. Сопоставление шаблона позволяет обнаружить местоположение некоторого изображения-шаблона Tс размерностью w×h на исходном изображении Iс размерностью W×H. Для этого Tпутем вычисления NCC последовательно сравнивается с каж- дым фрагментом I, имеющим размерность w×h. На выходе будет получено изображе- ние в градациях серого R с размерностью (W – w + 1)×(H – h + 1), где яркость каждого пикселя R (x, y) указывает на сходство его окрестности с шаблоном. Значение яркости R (x, y) определяется следующей метрикой:

где Tx, y – среднее значение яркости для шаблона;
I x, y – среднее значение яркости для текущего фрагмента исходного изображения.
Для фильтрации точек отслеживания используется частный случай NCC, когда размерности T и I совпадают. Для всех точек на предыдущем и следующем кадрах формируются изображения размером 10×10 пикcселей с центром в ключевой точке. Далее полученные изображения попарно сравниваются посредством вычисления NCC. Описанный процесс проиллюстрирован на рис. 2.
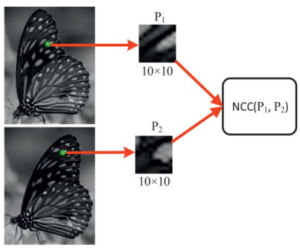
Рисунок 2 – Сравнение окрестностей ключевых точек путем вычисления NCC
После вычисления NCC для всех пар точек смежных кадров выполняется следующая фильтрация точек:
- Находится медианное значение последовательности значений NCC для всех пар точек.
- Точки, для которых значение нормаизованной корреляции оказалось меньше медианного значения, будут отброшены.
Итоговая схема одной итерации алгоритма отслеживания движения объектов приведена на рис.3.

Рисунок 3 – Одна итерация алгоритма отслеживания движения объектов
Распознавание объектов с помощью свёрточной нейронной сети. Для выполнения распознавания объектов в видеопотоке выбор был сделан в пользу современных архитектур свёрточных нейронных сетей. СНС позволяют распознавать изображения с точностью, значительно превосходящей точность других методов классификации изображений [8, 9].
В ходе выполнения работы были проанализированы наиболее популярные современные архитектуры сверточных нейронных сетей, применяемы в задачах классификации изображений [10–12] (табл. 1).
| AlexNet | VGG Net | Google GoogLeNet | ResNet | MobileNet | |
|---|---|---|---|---|---|
| Год | 2012 | 2014 | 2014 | 2015 | 2017 |
| Кол–во слоев | 18 | 16 | 22 | 152 | 102 |
| Кол–во параметров, млн | 60 | 138 | 5 | 60 | 5 |
| Точность,% | 84,7 | 92,7 | 93,33 | 96,4 | 87,3 |
| FPS | 5 | 7 | 19 | 11 | до 450 |
Одним из последних решений в сфере распознавания образов является семейство сетей MobileNets [12], которые были предложены компанией Google в 2017 г. Они предназначены для решения задач компьютерного зрения на мобильных устройствах, то есть устройствах с малым объемом памяти и вычислительных ресурсов. MobileNet проигрывают представителям семейства сетей ResNet и Inception в плане точности классификации. Однако MobileNet имеет малые задержки (частота обработки кадров видеопотока может достигать 450 кадров в секунду) при обработке одного изображения и небольшие требования к ресурсам устройства, вследствие чего данная архитектура была выбрана в качестве основы построения детектора в разрабатываемой системе отслеживания объектов.
Экспериментальные исследования. Для реализации системы был выбран язык программирования Python а также библиотеки OpenCV и TensorFlow. В качестве аппаратной платформы для построения и тестирования разрабатываемой системы был выбран персональный компьютер с графической картой GeForce GTX 1080 Ti и установленным программным обе-спечением CUDA и cuDNN. Это позволило достичь значительного ускорения работы нейронной сети MobileNet и получить систему, работающую в режиме реального времени.
Для проведения испытаний использовались четыре видеофайла: Jumping, Box, Motocross и Car Chase (табл. 2) [7].
| Название | Количество кадров | Движение камеры | Перекрытие | Полное исчезновение | Изменение размера объекта |
|---|---|---|---|---|---|
| Jumping | 313 | Да | Нет | Нет | Нет |
| Box | 1161 | Нет | Да | Нет | Нет |
| Motocross | 2665 | Да | Да | Да | Да |
| Car Chase | 9928 | Да | Да | Да | Да |
Для оценки качества работы предлагаемого алгоритма было проведено его сравнение с алгоритмами Online Boosting Track, MIL Tracker и KCF Tracker. Использовались следующие критерии:
- Скорость работы алгоритма, измеряемая как кадровая частота в количестве кадров, обработанных за секунду (Frames per Second, далее FPS).
- Точность, вычисляемая на основе количества успешно распознанных кадров, когда ограничительное окно покрывает более 50 % объекта. Кадры, на которых отлеживаемый объект не присутствовал, не учитывались.
Результаты тестирования приведены на рис. 4.
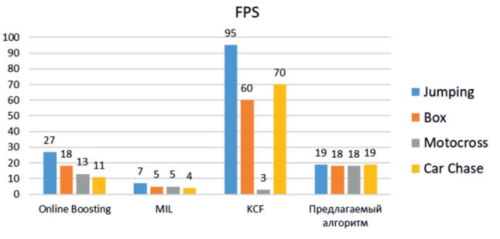
а)
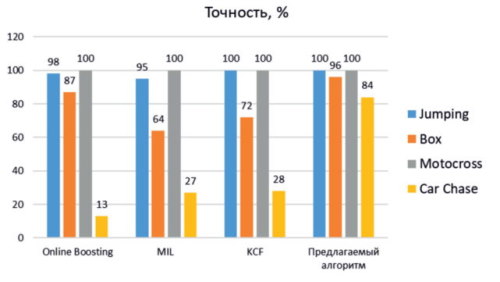
б) Рис. 4. Результаты сравнения предлагаемого алгоритма отслеживания объектов в видеопотоке и современных методов: а) количество кадров в секунду (FPS); б) точность отслеживания объекта
По результатам исследований можно сделать вывод, что предложенный в данной работе алгоритм не уступает аналогам в плане точности отслеживания объекта, а в некоторых случаях и превосходит их. Это во многом объясняется тем, что разработанная технология отслеживания объектов включает в себя детектор, который позволяет повторно инициализировать трекер в случае потери объекта. Кроме того, алгоритм показал стабильный показатель скорости обработки видеопотока, который в незначительной мере зависит от размера отслеживаемого объекта.
Выводы
В данной работе была описана система реального времени для отслеживания объекта в видеопотоке. Система показала высокие результаты распознавания одного объекта на кадрах видеофайлов при использовании графических карт. Дальнейшая работа будет направлена на повышение точности и надежности работы системы, а также на увеличение скорости обработки видеопотока и обеспечения возможности одновременного отслеживания нескольких объектов.
Список литературы
- Grabner H., Grabner M., Bischof H. Real-time Track- ing via On-line In Proceedings British Machine Vision Conference (BMVC). 2006. vol. 1. Р. 47–56.
- Babenko B. Visual Tracking with Online Multiple In- stance Learning. Computer Vision and Pattern Recognition, CVPR 2009. IEEE Conference. 2009. Р. 101–108.
- Henriques, J. High-Speed Tracking with Kernelized Correlation Filters. IEEE transactions on pattern analysis and machine intelligence. 2015. Р. 301–314.
- Dorin Comaniciu and Peter Mean Shift: A Robust Approach Toward Feature Space Analysis. IEEE Trans. Intell. 2002. Р. 603–619.
- Shujun Yao, Xiaodong Chen, Sen Wang, Zhihai Jiao, Yi Camshift algorithm - based moving target recognition and tracking system. IEEE International Conference on Virtual Environments Human-Computer Interfaces and Measurement Systems (VECIMS) Proceedings. 2012. Р. 513–529.
- Fleet D.J., Weiss Optical flow estimation. Handbook of Mathematical Models in Computer Vision. 2005. Р. 237–257.
- Kalal Z., Mikolajczyk K., Matas J. Forward-Backward Error: Automatic Detection of Tracking International
- Conference on Pattern Recognition In International Conference on Pattern Recognition. 2010. Р. 23–26.
- Goodfellow I., Bengio, Courville A. Deep Learning. The MIT Press, 2016. 800 p.
- Simonyan K. Very Deep Convolutional Networks for Large-Scale Image Recognition. ICLR 2014. Р. 587–601.
- Szegedy C. Going deeper with convolutions. Computer Vision and Pattern Recognition (CVPR), IEEE Conference. Р. 488–502.
- He K. Deep Residual Learning for Image Recognition. Computer Vision and Pattern Recognition (CVPR), IEEE Con- ference. Р. 770–778.
- Howard G. MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications. ArXiv. 2017. URL: https://arxiv.org/abs/1704.04861 (дата обращения: 17.10.2018).