Реферат по теме выпускной работы
Содержание
- Введение
- 1. Опытное определение параметров и расчет рабочих характеристик асинхронных двигателей
- 1.1. Основные понятия
- 1.2. Опыт холостого хода
- 1.3. Опыт короткого замыкания
- 2. Определение параметров схемы замещения асинхронного двигателя по справочным данным
- 3. Расчет параметров схемы замещения по известным методикам
- Выводы
- Список источников
Введение
В современных системах управления двигателями как постоянного так и переменного тока является максимально точное определение их энергетических и механических параметров, для реализации наиболее качественного и экономического управления и регулирования. Не всегда есть возможность определить параметры двигателя по паспортным данным, а если они и есть то лишь основная информация, такая как: номинальная мощность , номинальное напряжение , номинальный ток , номинальная частота и номинальная скорость . Для корректного регулирования электропривода приводчикам необходимо иметь более обширные знания о машине, такие как: активное сопротивление статора и ротора, индуктивное сопротивление статора и ротора, потокосцепления статора, ротора, которые невозможно найти в справочных материалах. Данные знания играют значительную роль в современных системах регулирования электроприводов, поэтому существует необходимость точного определения данных параметров расчетным или каким–либо другим способом. В настоящее время огромную популярность, среди устройств управления электроприводами, имеют (ПЧ), рассчитывающих нужные параметры схемы замещения автоматически по заранее заложенным формулам и командам, благодаря которым данные устройства являются лучшим вариантом в мире на данный момент в плане управления и регулирования двигателями переменного тока [1].

Рисунок – Работа трёхфазного двигателя (Анимация: 5 кадров, 7 циклов, 110 килобайт)
В зависимости от различных методик расчета параметров схемы замещения можно получить абсолютно отличные значения, поэтому очень важно подобрать подходящий способ для каждого двигателя индивидуально.
1. Опытное определение параметров и расчет рабочих характеристик асинхронных двигателей
1.1. Основные понятия
Существует два метода получения данных для построения рабочих характеристик асинхронных двигателей: метод непосредственной нагрузки и косвенный метод[1]. Метод непосредственной нагрузки заключается в опытном исследовании двигателя в диапазоне нагрузок от холостого хода до режима номинальной нагрузки с измерением необходимых параметров. Этот метод обычно применяется для двигателей мощностью не более 10–15 кВт. С ростом мощности двигателя усложняется задача его нагрузки, растут непроизводительный расход электроэнергии и загрузка электросети. Применение этого метода ограничивается еще и тем, что не всегда представляется возможным создать испытательную установку по причине отсутствия требуемого оборудования и недопустимости перегрузки электросети. Широкое применение получил более универсальный косвенный метод, применение которого не ограничивается мощностью двигателя. Этот метод заключается в выполнении двух экспериментов: опыта холостого хода и опыта короткого замыкания.
Эти опыты легко реализуются, для их проведения требуется минимальная мощность установленного оборудования. Экспериментальные исследования асинхронных двигателей в рабочих режимах, как правило, не проводятся в виду их большой трудоемкости и стоимости. Характеристики асинхронных двигателей в рабочих режимах получают расчетным путем по схеме замещения.
1.2. Опыт холостого хода
Питание асинхронного двигателя при опыте х.х. осуществляется через (ИР) напряжения (рис. 1.1) или (АТ), позволяющие изменять напряжение в широких пределах, также можно использовать (ТРН) или (НПЧ). При этом вал двигателя должен быть свободным от механической нагрузки. В схеме присутствуют также измерительные приборы: амперметр, вольтметр и ваттметр, для снятия нужных физических величин.
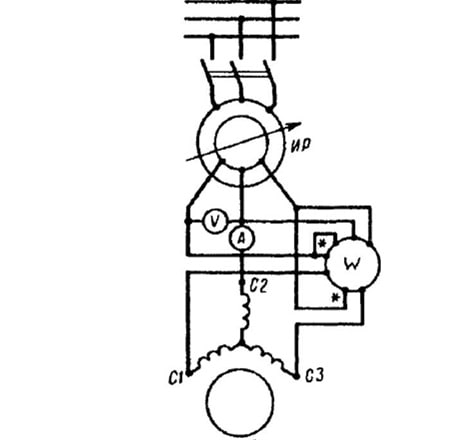
Рисунок – Схема включения трехфазного асинхронного двигателя при опытах х.х. и к.з.
Опыт начинают с повышенного напряжения питания[2]
Затем постепенно понижают напряжение до 0,4U1ном так, чтобы снять показания приборов в 5–7 точках[3]. При этом один из замеров должен соответствовать номинальному напряжению U1ном. Измеряют линейные значения напряжений и токов и вычисляют их средние значения:
А затем в зависимости от схемы соединения обмотки статора определяют фазные значения напряжения и тока х.х.:
При соединении в звезду
При соединении в треугольник
Ваттметр W измеряет активную мощность Ро, потребляемую двигателем в режиме х.х., которая включает в себя электрические потери в обмотке статора, магнитные потери в сердечнике статора Рм и механические потери Рмех (Вт):
Здесь r1 – активное сопротивление фазы обмотки статора (Ом), измеренное непосредственно после отключения двигателя от сети, чтобы обмотка не успела охладиться.
Сумма магнитных и механических потерь двигателя (Вт)
Коэффициент мощности для режима х.х.
По результатам измерений и вычислений строят характеристики х.х.
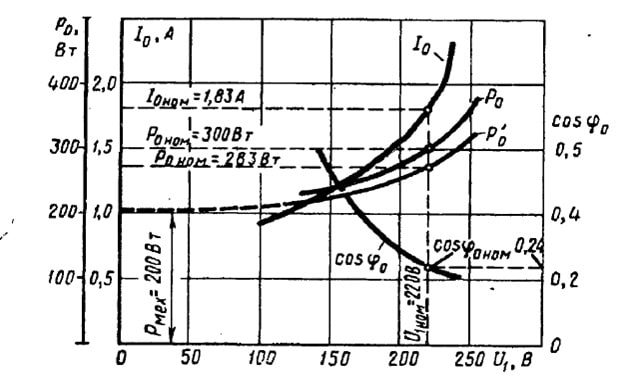
Рисунок 1.2 – Характеристики х.х. на примере асинхронного двигателя (3.0 кВт, 220/380 В, 1430 об/мин)
Для асинхронных двигателей с фазным ротором в опыте х.х. определяют коэффициент трансформации напряжений между обмотками статора и ротора. Этот коэффициент с достаточной точностью может быть определен по отношению средних арифметических линейных (междуфазных) напряжений статора к аналогичным напряжениям ротора.
1.3. Опыт короткого замыкания
Схема соединений асинхронного двигателя при опыте к.з. остается, как и в опыте х.х. (см. рис. 1.1)[4]. Но при этом измерительные приборы должны быть выбраны в соответствии с пределами измерения тока, напряжения и мощности. Ротор двигателя следует жестко закрепить, предварительно установив его в положение, соответствующее среднему току к.з. С этой целью к двигателю подводят небольшое напряжение (Uk=0.1U1ном) и медленно поворачивая ротор, следят за показанием амперметра, стрелка которого будет колебаться в зависимости от положения ротора двигателя. Объясняется это взаимным смещением зубцовых зон ротора и статора, вызывающего колебания индуктивных сопротивлений обмоток двигателя.
Предельное значение тока статора при опыте к.з. устанавливают исходя из допустимой токовой нагрузки питающей сети и возможности провести опыт в минимальный срок, чтобы не вызвать опасного перегрева двигателя. Для двигателей мощностью до 1 кВт возможно проведение опыта начиная с номинального напряжения Uк=U1ном. В этом случае предельный ток Ik=(5–7)Iном. Для двигателей большей мощности сила предельного тока Iк=(2,5–5)I1ном. При выполнении опыта к.з. в учебных целях можно ограничиться предельным током Iк=(1,5–2,5)I1ном. При выполнении опыта к.з. желательно соединение обмотки статора звездой.
Определив диапазон изменения тока статора при опыте к.з., опыт начинают с предельного значения этого тока, установив на индукционном регуляторе соответствующее напряжение к.з. Uк. Затем постепенно снижают это напряжение до значения, при котором ток Iк достигнет нижнего предела установленного диапазона его значений. При этом снимают показания приборов для 5–7 точек, одна из которых должна соответствовать номинальному току статора (Ik=I1ном). Продолжительность опыта должна быть минимально возможной. С этой целью измеряют лишь одно линейное напряжение (например, UКАВ), так как некоторая несимметрия линейных напряжений при опыте к.з. не имеет значения. Линейные токи измеряют хотя бы в двух линейных проводах (например, IКА и IКВ). За расчетное значение тока к.з. принимают среднее арифметическое этих двух значений. После снятия последних показаний приборов двигатель следует отключить и сразу же произвести замер активного сопротивления фазы обмотки статора, чтобы определить температуру обмотки. Линейные напряжения и токи пересчитывают на фазные Uk и Iк по формулам, аналогичным опыту х.х.
Ваттметр W измеряет активную мощность к.з. Рк. По полученным значениям напряжений Uk , токов Ik и мощностей Pk вычисляют следующие параметры:
коэффициент мощности при к.з.
полное сопротивление к.з.
активные и индуктивные составляющие этого сопротивления (Ом)
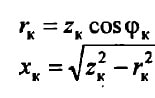
Измеренные и вычисленные величины заносят в таблицу, а затем строят характеристики к.з. (рис. 1.3).
Рисунок 1.3 – Характеристики к.з. на примере асинхронного двигателя (3.0 кВт, 220/380 В, 1430 об/мин)
При опыте к.з. обмотки двигателя быстро нагреваются до рабочей температуры, так как при неподвижном роторе двигатель не вентилируется.[5]
Температуру обмотки обычно определяют по сопротивлению базы, измеренному непосредственно после проведения опыта, по формуле:
Если же температура обмотки оказалась меньше расчетной рабочей температуры для соответствующего класса нагревостойкости изоляции двигателя, то активное сопротивление к.з. rk пересчитывают на рабочую температуру:
Затем пересчитывают на рабочую температуру полное сопротивление к.з.
напряжение к.з.