
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования
- 3. Устройство и принцип работы вентильно-индукторного двигателя
- 3.1 Конструктивные особенности ВИД
- 3.2 Принцип действия ВИД
- 3.3 Преимущества и недостатки ВИД
- 4. Управление вентильно-индукторным двигателя
- 4.1 Система управления ВИД
- 4.2 Опридиление углов коммутации ВИД
- 4.3 Моделирование ВИД
- Выводы
- Список источников
Введение
Вентильно–индукторный двигатель является одним из старейших электродвигателей, разработанных в период с 1830 по 1850 год. Из-за сложности управления он не мог найти широкого применения и, таким образом, постепенно терял свою актуальность до середины 1960 года, пока не началось развитие в области силовой электроники. Это подтолкнуло исследователей к изучению возможности использования ВИД с более усовершенствованным управлением. В этом двигателе крутящий момент создается за счет стремления его вращающейся части (ротора) перемещаться в положение, в котором индуктивность возбужденной обмотки максимальна.
1. Актуальность темы
С развитием силовой электроники вентильно–индукторный двигатель (ВИД) стал конкурентоспособным выбором для некоторых промышленных установок в системах управления электрическими машинами из-за своей простоты и прочной конструкции. ВИД имеют такие преимущества, как простота ротора, высокая скорость работы, простота ремонта, высокая степень независимости между фазами. Приводы ВИД используются в аэрокосмических системах, морских силовых установках, линейных приводах, горных приводах, ручных инструментах и в бытовых приложениях. Однако основным недостатком ВИД является большая пульсация крутящего момента на низких скоростях, которая вызывает интенсивную и нежелательную вибрацию и акустический шум и ограничивает области применения ВИД.
В настоящее время снижение пульсаций крутящего момента в ВИД стало важной и сложной темой исследований. Пульсация крутящего момента очень серьезна, особенно на низкой скорости, что вызывает нежелательную вибрацию и акустический шум.
2. Цель и задачи исследования
На основе литературных источников и исследований ВИД, изучить на математической модели особенности применения ВИД для промышленных и энергетических установок. В пакете Matlab разработать модель и промоделировать рабочие режимы ВИД.
3. Устройство и принцип работы вентильно-индукторного двигателя
3.1 Конструктивные особенности ВИД
Вентильно–индукторная машина может иметь различные конструктивные исполнения. В качестве примера на рис.1 приведена машина 8/6, где 8 это число пар полюсов статора, а 6 – количество зубцов ротора.
Рисунок 1 – Поперечное сечение 4-х фазного ВИД с исполнением 8/6
(анимация: 8 кадров, 116 килобайт)
ВИД имеет следующие конструктивные особенности:
- сердечники статора и ротора имеют явнополюсную структуру;
- число пар полюсов относительно невелико, при этом число полюсов статора больше числа полюсов ротора;
- сердечники статора и ротора выполняются шихтованными;
- обмотка статора сосредоточенная катушечная. Она может быть одно- или многофазной;
- фаза ВИД, как правило, состоит из двух катушек, расположенных на диаметрально противоположных полюсах статора. Известны ИМ с удвоенным числом полюсов статора и ротора. Такие электрические машины в 4-х фазном исполнении имеют конфигурацию 16/12. Фаза такой ВИД состоит из двух пар катушек, которые располагаются на полюсах статора таким образом, что их оси ортогональны;
- катушки фазы могут быть соединены в электрическом отношении параллельно или последовательно, в магнитном — согласно или встречно;
- обмотка на роторе ВИД отсутствует
На рис.2 приведены ВИД различной конфигурации.
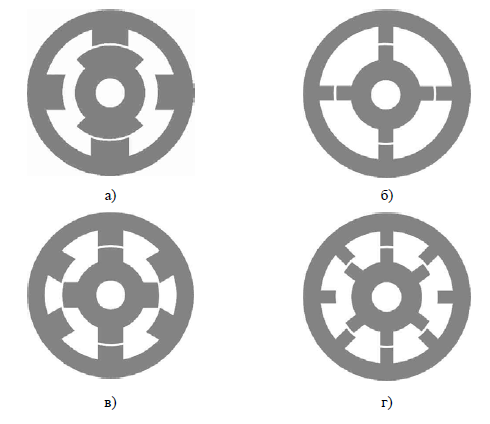
Рисунок 2 – Различные конфигурации ВИД: а — однофазная ИМ конфигурации 2/2; б — двухфазная ИМ конфигурации 4/4;
в — трехфазная ИМ конфигурации 6/4; г — четырехфазная ИМ конфигурации 8/6
Конструктивно ВИД, преобразователь частоты и система управления в ВИП могут быть выполнены раздельно. При этом в процессе работы они могут находиться на достаточно большом расстоянии.
Как и асинхронные машины, в обесточенном состоянии ВИД не создают крутящего момента при вращении. Остаточная намагниченность часто приводит к небольшому удерживающему моменту в обесточенном состоянии. На низких скоростях ВИД превосходят асинхронные машины с точки зрения плотности крутящего момента из-за большого количества пар полюсов, а на более высоких скоростях они явно уступают. В этом отношении они однозначно уступают синхронным машинам с постоянными магнитами. Высокой пульсации крутящего момента, которые приводят к сильному шуму, большие размеры двигателя, препятствует дальнейшему распространению реактивных машин.
3.2 Принцип действия ВИД
Принцип работы двигателя ВИД довольно прост: когда ток проходит через одну из его обмоток статора, крутящий момент создается за счет стремления его ротора совмещаться с возбужденным полюсом статора. Направление генерируемого крутящего момента зависит от положения ротора относительно фазы, на которую подается напряжение, и не зависит от направления потока в этой конкретной обмотке. Крутящий момент можно выполнить непрерывным, синхронизируя возбуждение каждой фазной обмотки с положением ротора. Ток, проходящего через обмотку ВИД, регулируется соответствующим включением и выключением силовых электронных переключателей, которые могут подключать каждую фазу ВРД к шине постоянного тока.
На одном валу с электромеханическим преобразователем (ЭМП) закреплён датчик положения ротора (ДПР). Каждая фаза ЭМП создаёт крутящий момент только в определённом диапазоне углов поворота ротора. В этом диапазоне углов ДПР вырабатывает сигнал, который поступает в микропроцессор и далее, через согласующее устройство, в электронный коммутатор, питающийся от источника постоянного тока. При поступлении сигнала в электронный коммутатор соответствующая фаза ЭМП подключается к источнику постоянного тока. При выходе за пределы рабочего диапазона углов поворота ротора подача сигнала ДПР прекращается и соответствующая фаза закорачивается сама на себя, а затем подключается к напряжению обратной полярности. Такое подключение приводит к быстрому спаданию тока в фазе до нуля.
Положение зубца ротора, в котором его ось совпадает с осью зубца статора, называется согласованным, а положение, в котором ось зубца статора проходит по оси между двумя соседними зубцами ротора – рассогласованным. Так для фазы А имеет место рассогласованное положение (рис.3а), а для фазы С – согласованное.
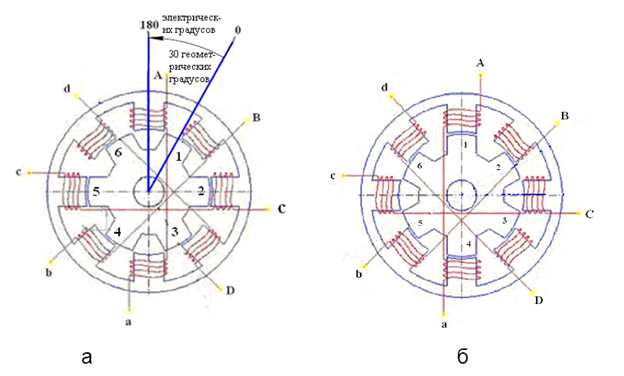
Рисунок 3 – Конструкция четырёхфазного ВИД с соотношением чисел пазов 8/6
а) – в рассогласованном положении относительно зубцов фазы А;
б) – в согласованном положении относительно зубцов фазы А.
Как правило, вентильный реактивный двигатель имеет три или более фаз. Но есть также специальные конструкции с двумя или одной фазой. Чтобы переключиться в нужный момент, машина обычно оснащается датчиком положения ротора. Существуют также методы управления без датчика, основанные на токе статора или крутящем моменте.
3.3 Преимущества и недостатки ВИД
Преимущество реактивного двигателя заключается в том, что потери возникают практически только в неподвижном статоре, который, таким образом, можно легко охлаждать снаружи. Конструкция двигателя не требует обмоток на роторе и постоянных магнитов, а это означает, что возможна простая и надежная конструкция. Следовательно, реактивные двигатели соответствующей конструкции устойчивы к кратковременным перегрузкам. Благодаря сравнительно простой конструкции ротора без катушек или специальных материалов (не требуются постоянные магниты и такие материалы, как редкоземельные элементы), ротор может быть прочным и надежным. При соответствующей конструкции можно допускать превышение скорости.
Основным недостатком реактивного двигателя является пульсирующий крутящий момент, что особенно важно, когда количество полюсов статора невелико. Другими недостатками являются пульсирующие радиальные силы между ротором и статором, которые нагружают подшипники и являются причиной сравнительно высокого уровня шума. Кроме того, как и в случае с асинхронной машиной, для создания вращающегося поля требуется реактивный ток. Этот реактивный ток увеличивает полную мощность электронных преобразователей. Сложная реализация системы управления. Для каждого типоразмера двигателя требуется проектировать свой преобразователь и рассчитывать систему управления, что усложняет внедрение ВИД в промышленное производство.
4. Управление вентильно-индукторным двигателя
Типичная система привода вентильно–индукторного электродвигателя (ВИД) состоит из трех основных компонентов: силового электронного преобразователя, логической схемы управления и вентильно-индукторного электродвигателя.
4.1 Система упарвления ВИД
Вентильно индуктивные машины в большинстве случаев работают с регулируемой скоростью. Рис. 4 показана схема регулирования. Силовая часть состоит из источника, преобразователя и машины. В качестве датчиков обычно требуется датчик положения ротора и датчик тока обмотки фазы.
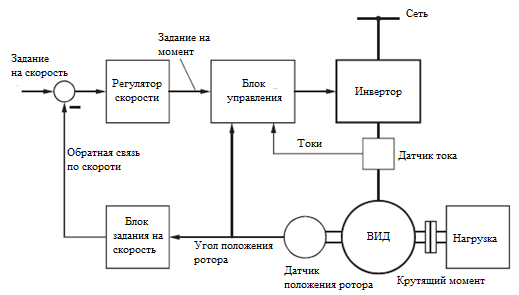
Рисунок 4 – Схема ВИД с системой регулирования скоростью.
Угол поворота определяет скорость вращения. Отклонение регулирования задает заданное значение крутящего момента (дрейф или торможение). Однако, в отличие от обычных приводов, в подчиненной цепи управления током крутящий момент не может быть непосредственно отрегулирован, потому что ток не является прямым показателем крутящего момента. Скорее, крутящий момент только косвенно влияет на амплитуду тока (в нижнем диапазоне оборотов, импульсный режим) и углы переключения (особенно на более высоких оборотах, блоковый режим).
Поэтому соответствующую информацию необходимо хранить в цифровой памяти и извлекать для управления преобразователем в соответствии с текущим рабочим состоянием (в зависимости от скорости вращения и нагрузки).
В простейшем случае датчик положения ротора может быть реализован как оптический датчик, отображающий ротор. Один из возможных вариантов конструкции ВИД с тремя фазами 6/4 показан на рис. 5
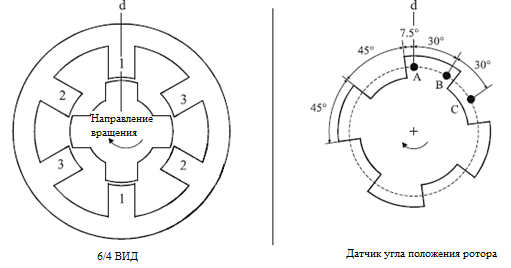
Рисунок 5 – Простая конструкция датчика положения ротора.
Диск энкодера имеет четыре зубца и четыре зазора одинаковой длины (45°), три световых барьера A, B, C расположены на расстоянии 30° (электрический 120°) по окружности. Задняя кромка выровнена со смещением 7,5° (электрическое 30°) в положении d обмотки 1.
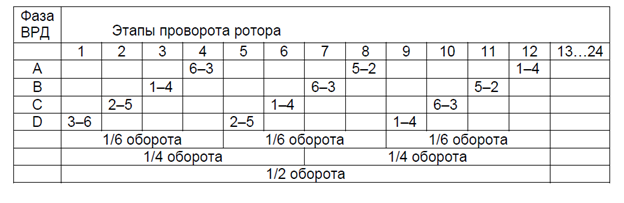
Задача управления ВРД сводится к распределению сигналов управления, подаваемых на обмотки статора в необходимой последовательности, а также к включению и отключению обмоток в строго определенные моменты времени в зависимости от положения ротора.
Таблица 1 – Иллюстрация вращения ротора ВРД (по часовой стрелке)
Частота вращения ротора зависит от:
- силы магнитного притяжения, а значит, от тока обмоток;
- тормозного момента, приложенного к ротору. Для стабилизации частоты вращения ротора n во всём диапазоне рабочих нагрузочных моментов на валу необходима обратная связь (ОС) по частоте вращения ротора. Изменение частоты вращения обеспечивается регулированием подводимого к обмоткам тока.
- сформировать циклограмму коммутации обмоток с функцией оптимизации углов включения и отключения;
- организовать ОС для стабилизации частоты вращения ротора во всём рабочем диапазоне нагрузочных моментов на валу;
- осуществить формирование тока в обмотках;
- выбрать оптимальную для данного ВИД силовую схему коммутатора;
- организовать канал связи с пультом настройки (ПН) для задания уставок, изменения режимов функционирования и индикации текущих параметров
4.2 Определение углов коммутациии ВИД
Определение углов коммутации для получения максимальной мощности на валу во всём диапазоне скоростей.
Чтобы найти углы коммутации, обеспечивающие максимальный крутящий момент на валу и мощность для каждой скорости. Затем необходимо добиться сопряжения с непревзойденным положением и номинальным током:
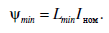
Эта магнитная связь должна быть достигнута в тот момент, когда индуктивность начинает расти. Тогда время, необходимое для достижения нарастания потока при приложении напряжения BCC, определяется соотношением потока и напряжения BCC за вычетом падения напряжения на активном фазном сопротивлении. Падение напряжения на активном фазном сопротивлении невелико (по отношению к напряжению DCB), а сила тока растет, поэтому это значение можно аппроксимировать средним значением, которое позволяет определить время:
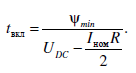
Это время можно выразить через угол опережения коммутации, который будет меняться вместе со скоростью вращения электродвигателя:
Выражение дано для режима прерывистого тока, но ток не обязательно может быть нулевым, когда требуется снова включить фазу, чтобы достичь номинального тока к моменту начала области увеличения индуктивности. Тогда угол опережения переключения должен отслеживать текущее значение потокосцепления фазы:
Поскольку поток изменяется во время работы фазы, этот угол постоянно меняется, но в какой-то момент становится больше, чем текущий угол, и фаза должна быть включена. В этом случае максимальный угол опережения коммутации не должен выходить за пределы точки А (Рис. 6).
Отключение фазы должно происходить под минимальным углом, соответствующим началу зоны максимальной индуктивности (точка C на рис. 6). В этом случае фазный ток должен успеть снизиться до 0 до того, как начнется область с уменьшающейся индуктивностью, иначе будет тенденция увеличения тока в генераторном режиме, что приведет к значительному увеличению тормозного момента. Формула для расчета угла отсечки фазы относительно точки B на рис. 6:
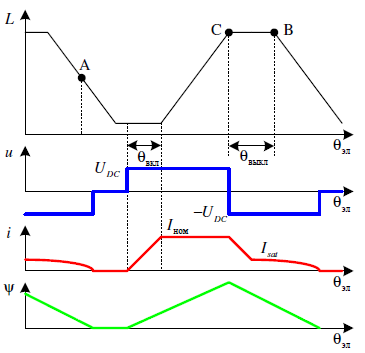
Рисунок 6 – Пояснение к углам коммутации.
Кроме того, должна быть ограничена ширина зоны переключения фаз, которая в статике не должна превышать 180°. Возможно небольшое превышение для компенсации падения напряжения на активном сопротивлении обмотки
4.3 Моделирование ВИД в пакете Matlab
Модель ВИД 8/6 построена в Matlab / Simulink показана на рис. 7. Разработаны дополнительные элементы управления с ПИ регулятором для повышения производительности вентильно-индукторного двигателя.
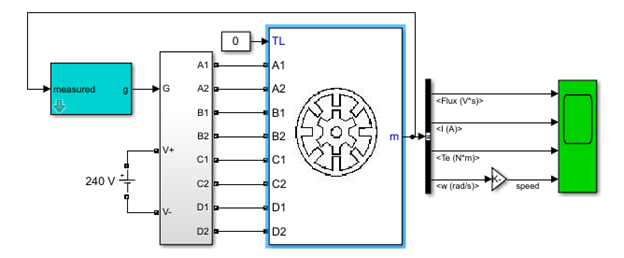
Рисунок 7 – Модель ВИД 8/6 в пакете Matlab.
Потоки четырех фаз статора показаны на рис. 8. Индукция потока насыщается в точке, где скорость становится постоянной. Первоначально, когда двигатель запускается, он потребляет большой ток, пропорциональный крутящему моменту.
Результаты моделирования
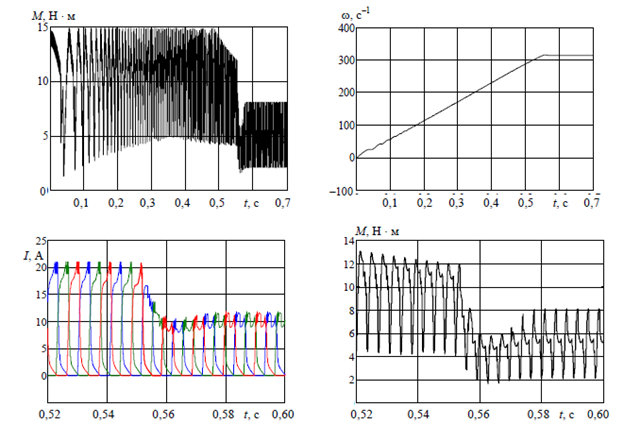
Рисунок 8 – Графики переходных процессов ВИД.
Выводы
Разработанная имитационная модель позволяет исследовать электромагнитные и электромеханические процессы в вентильно-индукторном приводе, а также анализировать различные методы управления. Улучшение производительности ВИД достигается при применении ПИ регулятора. С помощью этих методов можно проанализировать широкий диапазон углов включения и выключения вместо обычных двух значений углов для включения и выключения. Предложенная схема управления не только увеличивает эффективность ВИД, но и обеспечивает широкий диапазон выбора значений тока.
Список источников
- Krishnan, R. Switched reluctance motor drives: modeling, simulation, analysis, design, and applications. / R. Krishnan. – Magna Physics Publishing, 2001. – 416 p.
- Киреев, А.В. Вентильно-индукторные электроприводы для подвижного состава. / АкадемЛит, 2011. – 340 с.
- Рымша В.В. Усовершенствованная цепно-полевая модель вентильно-реактивного двигателя. / Електротехніка і Електромеханіка. – 2010. – No 5. – С. 24–26.
- Petrushin A.D. Optimizatsiya aktivnoy chasti ventil'no-induktornogo elektroprivoda / Vestnik RGUPS. - 2016. - No 1(61). - S. 61-65.
- Козаченко, В. Цифровое векторное управление вентильно-индукторными двигателями с независимым возбуждением / Компоненты и технологии– 2004. – No 8. – С.50-55. .
- Sahoo N.C., Xu J.X.et al. Determination of current waveforms for torque ripple minimization is switched reluctance motors using iterative an investi-gation/ No 4. PP. 369-377. .
- Ю.А. Голандц Вентильные индукторно-реактивные двигатели – Спб: ГНЦ РФ – ЦНИИ «Электроприбор», 2003. – 148 с.
- Жарков, A. A. Датчики положения ротора для вентильно-индукторного электропривода с векторным управлением / Электричество. – 2008. – No 5. – С. 36–41
- Кузнецов В.А., Определение вращающего момента вентильно-индукторного двигателя / Электротехника, электромеханика и электротехнологии: Сб. тр. четвертой межд. конф. 18-22 сентября 2000 г. Клязьма, 2000. – С.338-339.
- Сергеев, Ю.С. Приводы вибрационных машин на базе вентильно–индукторных двигателей: диссертация на соискание ученой степени кандидата технических наук / ЮУрГУ, 2011. – 208 с.