
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Определение положения
- 4. Выбор аппаратной части
- 4.1 L298 Dual H–Bridge драйвер
- 4.2 Понижающий модуль на микросхеме MP1584EN
- 4.3 Радиомодуль NRF24L01+
- 4.4 Датчик тока на 5A ACS712
- Выводы
- Список источников
Введение
Человечество всегда было озабочено вопросом, как же упростить управление автомобилем, сделать машину более маневренной, устойчивой на дороге? Одним из способов решения является установка электронных систем: курсовой устойчивости, система торможения и т.д. Но это не оказывало столь значительного эффекта. Поэтому инженеры пошли по другому пути – модернизации рулевого управления. Подруливающие задние колеса и теория прохождения поворота.
Даже при наличии самой прогрессивной конструкции подвески, к примеру, многорычажной, при движении на высокой скорости серьезным фактором, влияющим на управляемость, становится инерция прямолинейного движения задних колес, сопротивляющихся повороту. При повороте рулевого колеса, когда передние колеса начинают двигаться влево или вправо в направлении поворота, задние неуправляемые колеса пытаются оставаться на прежней траектории.
Типы подруливающей задней подвески и схемы работы В самых ранних системах - к примеру, на тракторах двадцатых годов прошлого века, угол подруливания был большим, до 15 градусов. С повышением максимальной скорости от таких больших углов пришлось отказаться. В современных автомобилях системы подруливающих колес обеспечивают поворот максимум на 5-8 градусов.
Задняя подруливающая подвеска делится на два вида — активную и пассивную.
Активная подруливающая подвеска.
Если автомобиль оснащен активной подруливающей задней подвеской, все четыре колеса поворачивают сразу, реагируя на движение руля. В современных системах усилие от рулевого колеса на задние колеса передается не механически при помощи системы рычагов, а через команду электронного блока управления и втягивающие реле, иначе называемым актуаторами. Они передвигают задние рулевые тяги, схожие с теми, что применяются в основной системе рулевого управления.
Активная подруливающая подвеска работает в двух режимах. При движении на низкой скорости, к примеру, на автостоянке или при заезде в гараж, в момент, когда передние колеса повернуты вправо, задние поворачивают влево, и наоборот. Это дает возможность уменьшить радиус поворота на двадцать — двадцать пять процентов.
На высокой скорости схема работы меняется. При повороте передних колес влево, задние колеса подруливают в ту же сторону, но на меньший угол. За определением точного угла подруливания следит электронный блок управления, принимая в расчет показания датчика углового ускорения, датчика скорости и других, формируя оптимальный алгоритм прохождения виража.
Пассивная подруливающая подвеска. Во многих современных автомобилях применена упрощенная система подруливающих задних колес, противодействующая инерции прямолинейного движения за счет использования в подвеске элементов, обладающих определенными физическими свойствами. Такой тип подруливающей подвески называется пассивным. В автомобилях с пассивным подруливанием задняя подвеска строится по особой геометрии, и, как правило с применением подвижной тяги Уатта. Система рассчитана так, что при прохождении виража на высокой скорости задние колеса за счет перераспределения сил в подвеске имеют тенденцию подруливать в ту же сторону, что и передние. Помимо геометрии эффект усиливается подбором сайлентблоков определенной формы и упругости. Такая конструкция существенно улучает стабильность автомобиля при повороте. Пассивной системой подруливающих задних колес оснащались, к примеру, автомобили Ford Focus первого поколения [1].
1. Актуальность темы
Инерция прямолинейного движения задних колес, особенно на высоких скоростях, в значительной степени влияет на управляемость автомобиля при вхождении в повороты. Проще говоря, они сопротивляются повороту, стремясь остаться на своей прежней траектории. Справедливости ради стоит сказать, что идея сама по себе не нова, и подруливающие задние колеса уже давно используются на погрузчиках, которые вынуждены маневрировать в замкнутых пространствах складов.
Сегодня у многих именитых автопроизводителей разработана и внедрена подобная система. Все они имеют свое название, отличаются конструктивно, но суть остается неизменной — задние колеса меняют свое положение при поворотах, сокращая траекторию и повышая устойчивость.
Актуальность заключается в разработке подруливающих колес на базе электропривода и сервопривода.
Рисунок 1 – Демонстрация работы рулевого механизма
(анимация: 6 кадров, бесконечный цикл повторения, 80 килобайт)
2. Цель и задачи исследования, планируемые результаты
Целью исследования является разработка подруливающего электропривода, направленного на уменьшение угла поворота [2].
Основные задачи исследования:
- Математическое описание объекта управления.
- Синтез системы управления объектом.
- Моделирование работы системы управления и объекта в среде Simulink пакета Matlab.
- При достижении необходимых результатов, выполнить генерацию кода системы управления на языке C/C++.
3. Определение положения
Первоначальной задачей, и одной из самых важных для робототехнической системы, является задача определения текущего положения, в которой находится робототехническая система.
Для этого, устройство подруливающих колес должно включать программную часть.
Ряд задач, которые должна решать система управления:
- Планирование угла поворота.
- Выполнения угла поворота по заданной скорости, необходимо выработать задающие воздействия для исполнительных механизмов системы.
Блок первичной обработки данных получает необработанную информацию с датчиков о состоянии внешней среды. В этом блоке данные собираются, сгруппировываются и подвергаются обработке. На выходе получаются отформатированные данные, передающиеся по стандартным протоколам. Это необходимо для удобства подключения новых датчиков, и четкой систематизации данных, что в дальнейшем облегчает работу с данными.
Информационно-измерительная система идентификации ситуации на основе обработанных данных выстраивает картину окружающего мира. Данные с датчиков преобразуются в набор параметров, на основе которых другие подсистемы принимают решения.
Параметры формируются с помощью базы знаний и алгоритмов. Здесь же производится распознавание окружающих объектов и построение сенсорной карты среды [3]. В базе алгоритмов содержатся математические алгоритмы для выстраивания на основе данных целевой сенсорной карты, распознавания окружающей обстановки и предметов (распознавание звуковых образов и изображений, цифровая обработка сигналов), вычисление необходимых параметров, и проверка полученных данных. База знаний представляет информацию о внешней среде, заложенную на этапе обучения и приобретаемую в процессе функционирования. Знания упорядочиваются и обновляются.
4. Выбор аппаратной части
Для тестирования и отладки программы в ходе магистрской работы будет использована радиоуправляемая модель в которую будут входить следующие комплектующие: L298 Dual H–Bridge драйвер, Понижающий модуль на микросхеме MP1584EN, Радиомодуль NRF24L01+, Датчик тока на 5A ACS712, Arduino Uno.
4.1 L298 Dual H–Bridge драйвер
L298n представляет собой двойной мостовой драйвер для управления двунаправленными нагрузками с токами до 2А и напряжением от 4.5 В до 46 В. Микросхема разработана для управления реле, соленоидами, двигателями постоянного тока и шаговыми двигателями. L298n имеет TTL совместимые входы. В L298n существует разделение электропитания для логической схемы и для нагрузки, что позволяет подключить нагрузку с меньшим или большим напряжением питания, чем у микросхемы, а также уменьшает помехи [4].
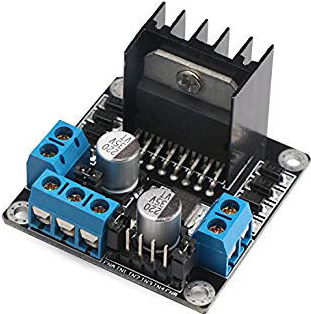
Рисунок 2 – Двойной мостовой драйвер L298n
Микросхемы L298n имеют встроенную защиту от перегрева. Выходы микросхемы отключаются при нагреве до температуры около +70°С
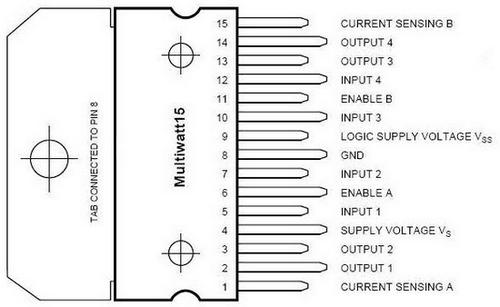
Рисунок 3 – Расположение выводов драйвера L298n
| 1 | SENS-A | Контроль тока 1 и 2 каналов |
|---|---|---|
| 2 | OUT2 | Выход 2 канала |
| 3 | OUT3 | Выход 3 канала |
| 4 | Vs | Питание нагрузки |
| 5 | IN1 | Вход 1 канала |
| 6 | EN-A | Разрешение работы 1 и 2 канала |
| 7 | IN2 | Вход 2 канала |
| 8 | GND | Общий вывод |
| 9 | Vss | Питание логики (+5V) |
| 10 | IN3 | Вход 3 канала |
| 11 | EN-B | Разрешение работы 3 и 4 канала |
| 12 | IN4 | Вход 4 канала |
| 13 | OUT3 | Выход 3 канала |
| 14 | OUT4 | Выход 4 канала |
| 15 | SENS-B | Контроль тока 3 и 4 каналов |
| Максимальное напряжение питания Vs | 50V |
|---|---|
| Максимальное напряжение питания Vss | 7V |
| Входное напряжение (IN, EN) | -0,3...7V |
| Напряжение на входах SENS | -1V...+2,3V |
| Максимальный постоянный выходной ток | ± 2A |
| Максимальный импульсный выходной ток (5ms однократно) | ± 3A |
| Максимальная рассеиваемая мощность | 25W |
| Диапазон температур | -25...+130°C |
Данный драйвер уже очень устрарел. Драйвер боботает на устаревших биполярных транзисторах, которые в открытом состоянии имеют довольно большое сопротивление. Как следствие драйвер не выдерживает нагрузки более 2А при внушительных размерах, а также всегда необходим радиатор для отвода тепла[5].
4.2 Понижающий модуль на микросхеме MP1584EN
Данный модуль представляет собой простой импульсный понижающий преобразователь постоянного напряжения на микросхеме MP1584EN. Модуль имеет низкий уровень шума, а это очень важно, так как он выдает питание на микроконтроллер и радиомодуль, которые очень требовательны к стабильному питанию [6].
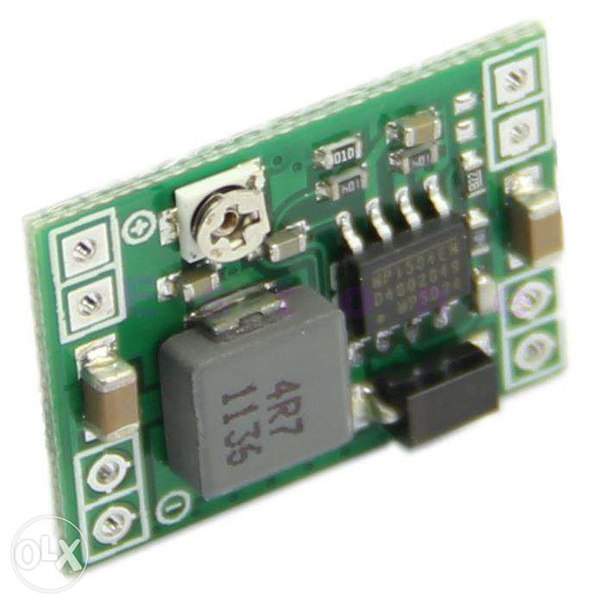
Рисунок 4 – Понижающий модуль на микросхеме MP1584EN
Для настройки выходного напряжения модуль имеет встроенный потенцеометр.
Характеристики стабилизатора:
- Входное напряжение: от 4.5В до 28В;
- Выходное напряжение:от 0.8В до 24В;
- Максимальный выходной ток: 3А;
В нашем случаее выходной ток модуля не превышеает 300мА, так что можно смело использовать его без радиатора, перегрева точно не будет.
4.3 Радиомодуль NRF24L01+
Радиомодуль для связи микроконтроллеров между собой. Работает на частоте 2.4ГГц[5] (не требующая разрешений частота, которая так же используется для WiFi), скорость до 2Мбит, управляется по интерфейсу SPI, питание 3.3В (можно использовать вывод 3.3В платы Arduino). Существенно дешевле xbee модуля, хорошо подходит для промышленных систем управления. Радиус действия – на открыйтой местности до 100м, в пределах квартиры, через две стены работает уверенно, через три - бывают потери сигнала [8].
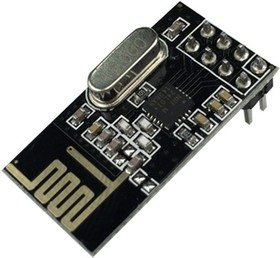
Рисунок 5 – Радиомодуль NRF24L01+
Характеристики:
- Скорость до 2Мбит (настраиваемая 2, 1, 0,25 Мб/с;
- 126 каналов связи, подключение один к многим, скачкообразная перестройка частоты;
- Аппаратный контроль ошибок, контроль адресации многоточечной связи;
- Низкое энергопотребление: 1.9–3.6В, 1мкА в режиме Power down;
- Модуляция GFSK;
- Встроенная 2.4ГГц антенна;
4.4 Датчик тока на 5A ACS712
Датчик постоянного тока ACS712[6] на эффекте Холла позволяет постаточно просто интегрировать его в схему и начать измерения тока. Датчик полностью готов к работе в микроконтроллером и не требует дополнительных компонентов. Все что нужно - это наличие аналогового входа на микроконтроллере.
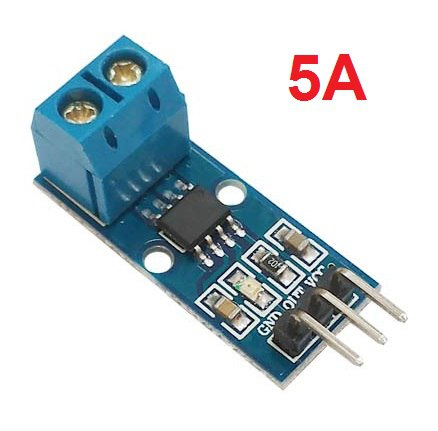
Рисунок 6 – Датчик тока на 5A ACS712
Характеристики:
- Диапазон измерения тока: до 5А;
- чувствительность: 185 мВ/А;
- максимальная полоса пропускания составляет: 80 кГц;
- напряжение питания датчика: 5В;
Выводы
В ходе разработки устройства подруливающих колес, на основании задач, планируемых к выполнению, был выбран микроконтроллер, а также необходимые комплектующие для реализации проекта.
В дальнейшем планируется сборка и доведение всех алгоритмов полной работоспособности.
На момент написания данного реферата магистерская работа еще не завершена. Ориентировочная дата завершения магистерской работы: июнь 2021 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Подруливающие задние колеса [Электронный ресурс]. – Режим доступа: https://www.drive2.ru/b/451627975595524270/
- Simulink. [Электронный ресурс]. – Режим доступа: https://matlab.ru/products/Simulink
- WaijungBlockset. [Электронный ресурс]. – Режим доступа: http://waijung.aimagin.com/
- DUAL FULL-BRIDGE DRIVER, Electronics Description, DataSheet № L298N
- Драйвер L298N. [Электронный ресурс]/ Режим доступа: http://robotchip.ru/obzor-drayvera-motora-na-l298n/
- Arduino IDE программная среда для разработки под Ардуино [Электронный ресурс]/ Режим доступа: https://arduinoplus.ru/arduino-ide-opisanie-gde-skachat/
- Eclipse (среда разработки). [Электронный ресурс]. – Режим доступа: https://www.eclipse.org/
- Коцегуб П. Х. Губарь Ю. В., Синтез комбинированной системы позиционного электропривода с цифровым ИП-регулятором – Донецк, 1985.
- CMOS Rail-to-Rail General-Purpose Amplifiers, DataSheet № AD8541_8542_8544
- 1CxemCAR - Android-управление машинкой по Bluetooth. [Электронный ресурс]. – Режим доступа: https://cxem.net/...
- Simulink. [Электронный ресурс]. – Режим доступа: https://matlab.ru/products/Simulink