Аннотация: В статье рассматривается перспективная модель многоканальной структуры системы охранной сигнализации на основе нейросетевых технологий, учитывающая физические характеристики объектов вторжения
Ключевые слова: модель, структура системы охранной сигнализации, нейросеть, техническое средство обнаружения, физические характеристики объектов вторжения.
Разработка систем охранной сигнализации (далее СОС) идeт в направлении интеллектуальных систем. Перспективным является разработка системы на основе нейросетевых технологий, в частности рассматривается построение многоканальных структур в которых, наряду с традиционным каналом обработки информации, присутствует нейросетевой канал [1,2,3].
Исследования, проводимые авторами показали, что значения основных показателей качества СОС меняются нелинейно и зависят от формируемой структуры СОС. Существует тенденция наращивания количества рубежей обнаружения [3,4], однако с увеличением количества рубежей обнаружения уменьшаются темпы прироста основных показателей СОС, при этом стоимость СОС увеличивается пропорционально количеству рубежей обнаружения. Целесообразно не увеличивать количество рубежей обнаружения, а усложнять алгоритмы обработки с учетом взаимосвязей информации, поступающей от большого количества чувствительных элементов (далее ЧЭ) технических средств обнаружения (далее ТСО) площадных и объјмных зон обнаружения (вместо точечных и линейных) [1,2].
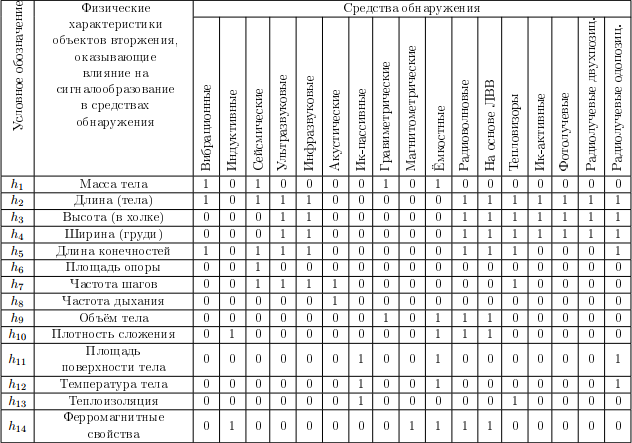
При формировании структуры СОС выбираются ТСО, работающие на различных физических принципах. В таблице 1 приведены характеристики различных ТСО, где обозначены:
физические принципы работы ТСО, их взаимосвязи с физическими характеристика ми объекта вторжения (далее ОВ);
физические характеристики ОВ, которые оказывают влияние на сигналообразование в СОС, обозначенные символами h (с 1 до 14) и учитываются при выборе ТСО из перечня разработчика или определяются заказчиком при формировании структуры СОС.
Таблица 1 – Физические характеристики объектов вторжения, оказывающие влияние на сигналообразование в средствах обнаружения
Оценка и учет взаимосвязей, разработка алгоритмов, учитывающих взаимосвязи информации о нарушителях в структуре СОС относятся к трудноформализованным или неформализованным оценкам, при которых получить алгоритм обработки информации общепринятыми методами затруднительно. Разработка сложных алгоритмов для трудноформализованных или неформализованных оценок, учитывающих взаимосвязи информации с разных ТСО, позволит оценить не только факт нарушения но и: 1) тип нарушителя; 2) способ воздействия ОВ; 3) характеристики нарушителя; 4) применение нарушителями определенной тактики проникновения и др., что позволит повысить вероятность обнаружения.
Разработка алгоритмов возможна с использованием интеллектуальных систем (далее ИС) на основе искусственных нейронных сетей (далее ИНС), исходя из следующих предположений [5]:
обучение интеллектуальных систем, на основе нейросетевых технологий, позволит учесть взаимосвязи информации, поступающей от ЧЭ ТСО, так как обучение осуществляется на примерах срабатывания ТСО;
в результате реализации процедуры обучения интеллектуальных систем синтезируется алгоритм классификации нарушителя;
применение интеллектуальных систем позволит более полно использовать информацио спектре помех воздействия внешней среды;
областью применения нейросетевых технологий являются трудноформализованные и неформализованные случаи оценки обстановки.
При разработке интеллектуальной системы, на основе нейросети, главным аспектом является реализация процедуры обучения, в результате которой нейросеть настраивается на определенные условия охраняемого объекта, последовательность обучения определяет достижение требуемых показателей интеллектуальной системы.
Использование интеллектуального канала обработки информации на основе искусственной нейронной сети позволит [6]:
осуществить быструю настройку к любым изменениям окружающей среды, к условиям действия помех;
провести интеграцию с существующими системами обнаружения нарушителя;
осуществить прогнозирование намерений действий нарушителя.
Многоканальность использования интел- лектуальной системы охранной сигнализации важных государственных объектов граждан- ской обороны позволяет обеспечить [7]:
наибольшее значение основного показателя СОС (вероятности обнаружения нарушителей): достигается выбором структуры традиционного канала, на основе бинарнологической обработки информации;
минимальное значение ложных тревог: обеспечивается использованием интеллектуальной системы на основе нейросетевых технологий;
идентификацию типа нарушителей;
формирование сигнала логической схемой обработки информации (далее ЛСОИ) о наличии нарушителя
Тревога
, по аналогии с существующей системой;адаптацию системы к меняющимся условиям эксплуатации, полю помех.
Может быть предложена обобщeнная структурная схема перспективной многоканальной интеллектуальной системы охранной сигнализации, представленная на рисунке 1 [8].
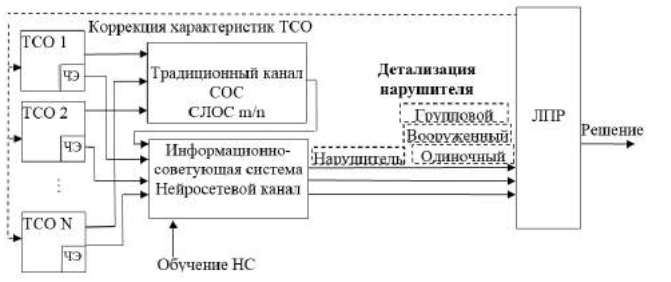
Рисунок 1 – Перспективная обобщенная структурная схема многоканальной интеллектуальной системы охранной сигнализации
Обобщенная структурная схема многоканальной интеллектуальной системы охранной
сигнализации содержит: ТСО, с которых информация одновременно поступает в многоканальную систему логической обработки информации (далее СЛОИ) в m из n входов
бинарно-логического канала (n – количество
рубежей обнаружения, m количество сигна лов поступающих от ТСО, необходимых для
формирования обобщeнного сигнала Тревога
СОС); информационно-советующую систему, включающую нейросетевой канал обработки информации.
Обобщeнная структурная схема многоканальной интеллектуальной системы охранной сигнализации работает следующим образом:
информация с ТСО одновременно поступает на многоканальную СЛОИ, в m из n входов традиционного канала и информационносоветующую систему, включающую нейросетевой канал обработки информации;
сигнал с выхода СЛОС традиционного канала, будет поступать также на вход информационно-советующей системы нейросетевой канал;
нейросетевой канал, после обучения нейросети и получения информации с традиционного канала, способен идентифицировать тип нарушителя: одиночный, групповой, вооружeнный, невооружeнный и т. д.;
лицо, принимающее решение (далее ЛПР), может получать информацию с выхода нейросети об идентифицированном нарушителе.
Заметим, что при этом бинарнологический канал обеспечивает фиксацию ограниченного числа (одного, двух) физических характеристик ОВ.
В то же время, СОС с использованием нейросетевых технологий может фиксировать большое количество физических характеристик ОВ за счeт возможного объединения фрагментов в единый образ. Распознавание образа ОВ в нейросетевом канале достигается на основе процедуры обучения [9].
Взаимосвязь информации, поступающей с
технических средств обнаружения, будет заключаться в том, что при воздействии нару-
шителя на чувствительные элементы различных ТСО, представленных в таблице 1, одновременно будут фиксироваться физические
характеристики ОВ разными ТСО, например
физическая характеристика длина тела
, одновременно фиксируется ТСО работающими
на физическом принципе (вибрационном, на
основе линии вытекающей волны, радиолучевом). Следовательно, детализацию информации о групповом и вооружeнном нарушителе,
показанной на рисунке 1, можно представить
в виде множества физических характеристик
объектов вторжения, представленных в таблице 1.
Обработка и учeт всего объeма информации позволит выдать достоверную информацию о нарушителе, что обеспечит принятие правильного решения по противодействию ОВ с максимальной эффективностью.
Показателем качества интеллектуальной СОС является ошибка, в процентах, отклонения значений выходного вектора и эталонного вектора ожидаемых значений. Компенсация помех основывается на том, что:
Воздействие нарушителя событие редкое, в основную часть времени на ЧЭ ТСО будут воздействовать помехи из окружающей среды. При воздействии возмущающих факторов (помехи воздействия окружающей среды) формирование обучающей выборки происходит за некоторый конечный временной интервал, включается устройство, фиксирующее помеху, информация обрабатывается в блоке подготовки данных и поступает в блок коррекции параметров нейросети.
В ходе воздействия возмущающих факторов контролируется отсутствие нарушителя (личным составом караула, телевизионными системами наблюдения) и информация на выходе нейросети. Таким образом, заведомо зная, что нарушителя во временной интервал воздействия помехи нет, происходит запись состояния помех и формирование обучающей выборки (рисунок 2).
Фиксация помех осуществляется постоянно, решая таким образом, задачу построения адаптивной системы, приспосабливающейся к изменяемой помеховой обстановке, при этом сам процесс коррекции нейросети к изменяемой помеховой обстановке окружающей среды занимает незначительный временной интервал. Предлагается коррекцию параметров нейросети проводить в строго определeнные интервалы времени, указанные в инструкции по эксплуатации [10].
Таким образом, предлагается модель адаптивной нейросетевой системы охранной сигнализации важных государственных объектов гражданской обороны к изменяемому полю помех, с участием лица принимающего решение для фиксации изменения поля помех и коррекции параметров нейросети.
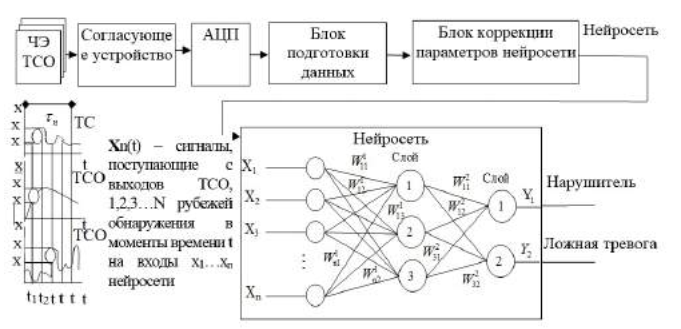
Рисунок 2 – Запись состояния помех в нейросети
Объединение всей информации, поступающей от ТСО, как через бинарнологический канал структуры СОС, так и через нейросетевой канал обработки информации, комплексирование информации от средств обнаружения, интеллектуальная обработка информации, поддержка принятия решения, позволит минимизировать количество ложных тревог при воздействии поля помех и повысить эффективность СОС
Список использованной литературы
1. Андреев А.С. Обоснование рациональной структуры подсистемы обнаружения автоматизированной системы охраны важных государственных и военных объектов : монография / А.С. Андреев, Серпухов 2012. – 113 с.
2. Андреев А.С. Обоснование совокупности типов технических средств обнаружения / А.С. Андреев // Труды МИТ Научно-технический сборник Том №7 Часть 1, 2004. – С. 86–90.
3. Андреев А.С. Общие принципы выбора технических средств обнаружения нарушителя в структуре
системы обнаружения. АСО / А.С. Андреев, А.М. Романов // Сб. тр. XXХIII межведомственной
НТК. Часть 2. – Серпухов: ФВА РВСН, 2014. – С. 42–45с.
4. Свидетельство о государственной регистрации программы для ЭВМ. Автоматизированный выбор
структуры системы обнаружения нарушителя с требуемыми показателями качества при рациональной стоимости [Текст] / Андреев А.С.: заявитель и патентообладатель ФВА РВ – № 2015663686 дата
государственной регистрации в Реестре программ для ЭВМ 28.12.2015.
5. Дараган, А.Д. Интеллектуальные физические датчики первичной информации : монография / А.Д.
Дараган, Серпухов: ФВА РВСН, 2013 – 182 с.
6. Андреев А.С. Модель гибридной многоканальной интеллектуальной системы обнаружения нарушителя на основе нейросетевых технологий / А.С. 33. Андреев // Сб. тр. XXХIV межведомственной
НТК. – Серпухов: ФВА РВСН, 2015. – С. 5–9.
7. Андреев А.С. Методика формирования рациональной структуры гибридной интеллектуальной системы обнаружения АСО / А.С. Андреев // Сб. тр. XXХIV межведомственной НТК. – Серпухов:
ФВА РВСН, 2015. – С. 10–13
8. Андреев А.С. Рекомендации по применению ТСО в подсистемах обнаружения АСО / А.С. Андреев
// Информ. сб. Москва ВА им Петра Великого, 2005. – 8 С.
9. Андреев А.С. Математическая модель процессов обучения нейросетевого канала многоканальной
системы обнаружения нарушителя / А.С. Андреев, А.Д. Дараган, А.А. Ефремов, А.М. Руденко //
Сб. тр. XXХVI межведомственной НТК. – Серпухов: ФВА РВСН, Часть 1, 2017. – С. 259–265.
10. Андреев А.С. Особенности компенсации помех в интеллектуальных системах охранной сигнализации / А.С. Андреев, А.Д. Дараган, // Сб. тр. XXХVI межведомственной НТК. – Серпухов: ФВА
РВСН, Часть 1, 2017. – С. 259–265.