Аннотация
Рассмотрены существующие в настоящее время системы управления судовыми электроприводами и требования Международной морской организации, предъявляемые к указанным системам управления. С целью повышения надежности систем управления и снижения потерь электроэнергии представлена эффективность применения микропроцессорной установки для пуска электроприводов большой мощности.
Ключевые слова: судно, асинхронный, двигатель, микропроцессор, тиристор.
Теоретические исследования в области описания пылевой динамики в условиях работы пылеотсасывающих установок
Общая постановка проблемы
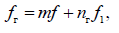
Нормальная работа механизмов, применяемых на морских судах, зависит от приводящих их в движение электроприводов. Примером устройств, приводимых в движение с помощью электроприводов, могут служить рулевые устройства, грузоподъемные механизмы и судовые нагнетатели. На современном этапе развития возрастают требования к модернизации систем управления электроприводов на проектируемых и строящихся судах. В настоящее время на большинстве судов, находящихся в эксплуатации, долгосрочная работа релейно-контакторной аппаратуры, в т. ч. электромеханических и электромагнитных реле, кнопок управления, применяемых в схемах автоматического управления электроприводов, зависит от нагрузки и частоты включений. В процессе эксплуатации контактная аппаратура требует систематической настройки, а также имеет недостаточную надежность. Как известно, с ростом количества релейно&–контактных систем в схемах управления снижается надежность работы схем. В качестве примера рассмотрим схему управления электроприводов пожарного насоса (рис. 1).
Как видно на схеме, пуск электродвигателя осуществляется последовательным включением в цепь статора сопротивлений (R).
Основной особенностью электроприводов судовых насосов является то, что эти электроприводы не реверсируются и не имеют режимов торможения, а их скорость практически не регули-руется.
Замыканием двухполюсного выключателя QF на схему управления подается питание, полу-чает питание катушка реле времени KT1 и реле KV1, замыкая свои контакты в цепи, реле KT2 вводит в работу систему. Запуск электродвигателя M1 осуществляется нажатием кнопки 1SB2 местного поста управления или 2SB2 на пульте дистанционного управления, замыкается реле KV1 и получает питание катушка линейного контактора KM1. Одновременно при замыкании реле KV1 подключается реле времени KT2. Последовательно соединенные контакты контактора KM1 и реле KT2 шунтируют кнопки пуска, другой контакт KM1 размыкает цепь реле времени KT1.
Рисунок 1 – Схема управления электроприводом пожарного насоса
При истечении выдержки времени реле KT1 своим контактом замыкает цепь реле KV2, ко-торое в свою очередь подает питание на катушку контактора KM2, который шунтирует пусковое сопротивление R в цепи электродвигателя. Один из контактов реле KT1 в цепи управления раз-мыкает цепь питания реле KT2. Реле KT2 с малой задержкой размыкает цепь питания KV1, этим размыкая цепь катушки контактора KM1. Несмотря на то, что контакт линейного контактора KM1 в цепи питания катушки KT1 замкнут, указанное реле времени не срабатывает, ввиду того контакт реле KV1 разрывает цепь выпрямителя VD, что приводит к размыканию цепи постоянного тока и разрыву цепи питания KT1. Следовательно, реле KV2 остается включенным, благодаря тому, что оно имеет самоблокировку с помощью своего контакта. Таким образом, по окончании процесса пуска из всех электрических аппаратов остаются включенными только линейный контактор KM2 и реле KV2 [1].
Если в процессе пуска возникнет неисправность, не сработает линейный контактор KM2 и одновременно контакт реле времени KT2 отключится, и после этого контакт электромеханического реле KV1, разомкнувшись, приведет к разрыву цепи питания катушки контактора KM1, и двигатель не запустится. Таким образом, реле времени KT2 препятствует тому, чтобы пусковые сопротивления долго оставались под напряжением.
Другой вид блокировки осуществляется последовательно соединенным в цепь пусковых кнопок контакта реле KT1. Пуск электродвигателя возможен только при замкнутом состоянии этого контакта. В рассматриваемом случае в результате самоблокировки реле KV2 его контакт остается открытым. Для защиты от перегрузки электродвигателя на схеме предусмотрено тепловое реле FP. Индикация включения сопротивлений в цепь электродвигателя осуществляется лампами Н1 и Н2. Остановка электродвигателя происходит нажатием кнопки 1SB1 на местном пульте управления или кнопки 2SB1 на дистанционном пульте управления [1].
В большинстве случаев для увеличения надежности автоматизированных электроприводов и снижения потерь энергии в релейно-контактной аппаратуре применяется бесконтактная аппаратура.
Для управления асинхронным двигателем с короткозамкнутым ротором рассмотрим схему, собранную на силовых тиристорах и подключенную в цепь статора (рис. 2).

Рисунок 2 – Схема пуска асинхронного двигателя с короткозамкнутым ротором с помощью тиристоров
В процессе пуска электродвигателя угол открытия тиристора необходимо регулировать так, чтобы при изменении значения приложенного напряжения на входе статорной обмотки от 0 до номинального можно было регулировать значение тока, протекающего по статорной обмотке и создаваемого им момента. С помощью подключенной к фазам А и С статорной обмотки, встречно-параллельной группы тиристоров VS1–VS4, можно регулировать процесс пуска асинхронного короткозамкнутого электродвигателя. Смещение управляющего сигнала, подаваемого на управляющие электроды, относительно напряжения должно составлять 60?. Напряжение на зажимах статора снижают для возможности снижения пускового тока и момента двигателя. При шунтировании резисторов с помощью контактов в цепи управления к обмотке статора прикладывается полное напряжение. При нажатии соответствующей кнопки в цепи управления дви-гателем прекращается работа схемы релейного управления [2].
Важнейшим достижением в области полупроводниковой техники является внедрение больших интегральных микросхем. Примером реализации указанных схем может служить микро-процессор. Одновременно с этим перед специалистами, занятыми в области разработки и проек-тирования автоматизированных электроприводов, управляемых с помощью микропроцессоров, ставятся важные задачи:
С применением программируемых микроконтроллеров предоставляется возможность создания связи с устройствами памяти и периферийными устройствами.
МикроЭВМ применены в управлении производственными процессами и транспорте, в том числе используются в системах управления преобразователями, а также широко применены в регулировании скорости вращения электроприводов.
Применение микропроцессорной техники в электроприводах обусловлено его непосредственно цифровым управлением. Следовательно, с помощью микроЭВМ осуществляется формирование и подача управляющих импульсов на тиристоры. Следует отметить, что скорость работы ЭВМ является одним из факторов, определяющих эффективность системы регулирования. Реализация алгоритма управления во многом зависит от качества программы управления. В свою очередь алгоритм управления разрабатывается благодаря использованию математической модели электропривода, чтобы модель соответствовала разрабатываемому алгоритму и сроку реализации. Одновременно учитываются особенности объекта, что способствует обес-печению требуемых качеств регулирования. Наиболее соответствующей в указанном отношении является дискретная модель тиристорного электропривода. В преобразователе происходит квантование электромагнитных процессов в соответствии с интервалом дискретности регулирования, и управляющие импульсы подаются на тиристоры с ограниченным интервалом по времени. В связи с этим управляющее воздействие системы на объект целесообразно дискретизацией по времени. То есть синтез силовой части электропривода и законов регулирования возможно осуществить на базе дискретной модели электропривода. Исследование организованных микропроцессорных систем управления электроприводами и их разработка имеют важную степень значимости на пути дальнейшего развития. Прежде всего, это сводится к замене электронных, электрических и электромеханических блоков универсальными устройствами с условными и логическими функциями. Определяются различные алгоритмы управления электроприводом и рабочей машиной, с помощью программируемого микроконтроллера. В микропроцессорных системах управления электроприводами применены программируемые логические контроллеры высокой надежности, которые обеспечиваются специальными системами защиты памяти, защиты от помех и другими средствами.
В настоящее время автономные инверторы с ШИМ, применяемые в электроприводах мощностью 1–5 МВт, выполнены на запираемых тиристорах. На выходе автономного инвертора в виде импульсов, следующих с несущей частотой f, происходит формирование выходного напряжения. Период следования импульсов несущей частоты

является одинаковым для всех фаз. Амплитуда указанных импульсов имеет одинаковое значение с напряжением автономного инвертора или определенной ее части. Значение выходных напряжений регулируется относительной продолжительностью импульсов. Напряжение на выходе инвертора содержит большой диапазон гармоник. Основные параметры напряжения двигателя, работающего в установившемся режиме, – это амплитуда U1m и частота f1 для первой гармоники. Как известно, высшие гармоники положительного действия не оказывают, увеличивая потери в двигателе, создают дополнительные пульсации, способствуют появлению емкостных токов, создают помехи и т. д. Напряжение выхода содержит гармоники высшего порядка с частотами