
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Огляд досліджень та розробок
- 2.1 Активні навігаційні системи
- 2.2 Пасивні навігаційні системи
- Висновки
- Перелік посилань
Вступ
Робота систем навігації заснована на пошуку шляху від точки відправлення до точки прибуття на графі, що є спрощеною цифровою копією реального світу. Можливість реалізації графа дуже гнучка, оскільки реальний світ можна оцифрувати із необхідною для роботи системи навігації точністю. Немає необхідності переносити на граф деталі реального світу, несуттєві на вирішення завдання пошуку шляху кожному конкретному ділянці об'єкта навігації.
Для оцифровування мережі доріг або приміщень у приміщенні доцільно використовувати зважений граф. Таким чином, вершини графа є перехрестями, населеними пунктами, кімнатами, а ребра – дороги, коридори, переходи. Вага ребер у разі вказує відстань цими дорогами. У просунутих алгоритмах вага ребер визначає ціну проходження цього ребра, куди можуть входити такі пункти як відстань, тип покриття, наявність світлофорів, рівень пробок, завантаженість тощо.
1. Актуальність теми
Сучасне рішення навігаційної задачі є навігація за допомогою бездротових технологій. Розробка таких систем та послуг стало популярним в останні роки в ІТ-індустрії. Деякі сучасні будівлі, такі як аеропорти, торгові центри, склади мають таку складну структуру та масштаб, щоб відчути дефіцит власних навігаційних інструментів. Оскільки це закриті приміщення, то супутникова навігація в них неможлива з ряду причин, по-перше, супутникового сигналу не проходить або спотворюється шляхом проходження за допомогою залізобетонних будівель, по-друге - точність супутникових координат становить у середньому 6 метрів, яка є дуже грубою помилкою. В межах кімнати.
Можливість реалізації систем такого класу стало можливим з масовим виглядом мобільних пристроїв з високою обчислювальною потужністю. Це також сприяло внеском розробки технологій передачі бездротових даних, що використовуються в мобільних додатках. Таким чином, стало можливим визначити місце розташування пристрою в просторі, подібному до того, як роблять пристрої GPS-системи.
Внутрішня навігаційна система може надати користувачеві таку функціональність як визначення місцезнаходження у будівлі, побудова оптимального маршруту, пропозиції націлювання та збірка статистики щодо діяльності.
Магістерська робота присвячена сучасному науковому завданні розробки підтримки апаратно-програмного забезпечення для системи навігації для внутрішніх приміщень, спрямованих на створення програмного продукту, який реалізує систему навігаційної системи в будівлях. Операційна система ОС використовується як операційна система, оскільки ця операційна система встановлюється на майстерності мобільних пристроїв у всьому світі [1]. На рисунку 1 показаний графік використання операційних систем.
2. Огляд досліджень та розробок
Внутрішні навігаційні системи можна розділити на два класи, а саме активні та пасивні. Активні авіаційні системи пропонують використання активних датчиків / випромінювачів і дозволяють відстежувати місце розташування та трафік у режимі реального часу. Пасивні системи, відповідно, не використовують датчики / випромінювачі для своєї роботи [2].
2.1 Активні навігаційні системи
Активні критичні навігаційні системи використовують наступні технології бездротової технології: IR, UWB, Wi-Fi, BLE та 5G. Маяки розподіляють сигнал, який ловить пристрій користувача. Потім сигнал обробляється, а її основа визначається розташуванням пристрою користувача відносно маяків, а в кінці відносно приміщення. Основною перевагою систем Wi-Fi є те, що вони можуть використовувати існуючі комунікації. Навпаки, BLE є гнучкою і зручною для розгортання. Щоб задовольнити вимоги майбутнього Інтернету речей (IOT) та точної локалізації, нові функції були додані до останніх технологій Wi-Fi та BLE. 5G привернула пильну увагу через їх високу швидкість, високу надійність та низьку затримку зв'язку. Порівняно з попередніми клітинними технологіями, 5G визначив три категорії додатків, у тому числі з низькою затримкою ультра-значення зв'язку (URLC) для забезпечення високої надійності (наприклад, надійність 99,99% з високошвидкісним рухом зі швидкістю 500 км / h) і невеликий сценарій затримки (наприклад, на рівні мілісекунд) (наприклад, автомобільні мережі, промисловий контроль та телемедицин), покращений широкосмуговий мобільний зв'язок (EMBB) для високих ставок передачі даних (наприклад, рівень гігабіт в секунду, з піком 10 гігабіт в секунду) та сценарії сильної мобільності (наприклад, відео, збільшена реальність, віртуальна реальність та віддалене обслуговування). Є плани рішення для кімнат на основі інших видів екологічних сигналів, таких як магнітний, акустичний, атмосферний тиск, видиме світло та інші. [3]
Розташування в таких системах навігації визначається найчастіше за методом геометричного місця. Основним принципом є геометричний розрахунок відстаней та кутів. За типом вимірювань методи розташування включають діапазон, що базується на діапазоні (наприклад, багатостороння, хв - макс, центроїд, близькість та гіперболічне розташування), засноване на куті (наприклад, багатошарового) та кута та діапазону (для Приклад, багатозначний). На рисунку 2 показаний основний принцип цих методів.
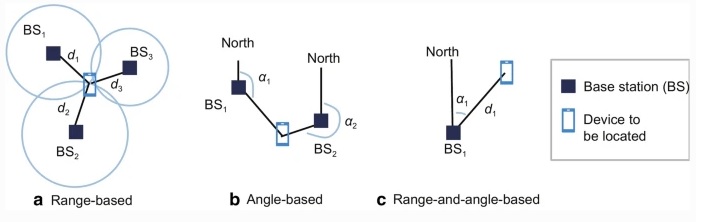
Рисунок 2 – Методи розташування
2.2 Пасивні навігаційні системи
Пасивна навігаційна система базується на наступних технологіях: RFID, QR-коди, NFC та ін. Пасивна навігаційна система розташована наступним чином: спеціальні етикетки розташовані у важливих та доступних частинах кімнати. Взаємодіявши з етикетками, користувач може з'ясувати, де він зараз, а також система може запропонувати маршрут до потрібної частини будівлі, з урахуванням поточного місцезнаходження. Навігаційна система, реалізована на пасивних пристроях, має ряд переваг щодо навігації, що реалізується технологіями активних пристроїв. Основною перевагою такого типу навігації є простота розгортання та висока швидкість інтеграції. Оскільки такі технології не вимагають постачання електроенергії та мінімуму спеціалізованого обладнання, це також економічно підходить для підприємств з невеликим бюджетом [2].
Підхід, департамент у системі Spotex базується на тому, що для більшості внутрішніх навігаційних систем точне місце не є важливим, але лише контекстна інформація про навколишні об'єкти є важливою та як дістатися до необхідного об'єкта. У більшості систем розташування насправді фактично визначає ключ для подальших запитів до бази даних об'єктів. Модель Spotex для визначення місця розташування використовує інформацію про наявність Wi-Fi-мереж. [4]
Висновки
Навігаційні системи активно розвиваються, оскільки попит на такі системи збільшується з ускладненням архітектури масового використання, а складність розвитку таких систем зменшується з удосконаленням бездротових технологій та мобільних пристроїв.
На відміну від історії систем позиціонування, цей підхід не вимагає попередньої маркування приміщення та обслуговування маяків, а поширеність мобільної OS Android дозволяє використовувати навігаційну систему на більшості сучасних смартфонів.
Перелік посилань
- Mobile Operating System Market Share Worldwide [Электронный ресурс] // StatCounter. – URL: https://gs.statcounter.com/os-market-share/mobile/worldwide
- Алутин Е.А. РАЗРАБОТКА СИСТЕМЫ НАВИГАЦИИ ВО ВНУТРЕННИХ ПОМЕЩЕНИЯХ НА ПЛАТФОРМЕ ANDROID / Алутин Е.А., Кривошеев С.В. // ИНФОРМАТИКА, УПРАВЛЯЮЩИЕ СИСТЕМЫ, МАТЕМАТИЧЕСКОЕ И КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ (ИУСМКМ-2020)Сборник материалов XI Международной научно-технической конференции в рамках VI Международного Научного форума Донецкой Народной Республики. - Донецк, с. 495-499
- El-Sheimy, N., Li, Y. Indoor navigation: state of the art and future trends. Satell Navig 2, 7 (2021). https://doi.org/10.1186/s43020-021-00041-3
- Абдрахманова А.М., Намиот Д.Е. Использование двумерных штрихкодов для создания системы позиционирования и навигации в помещении // Прикладная информатика. 2013. №1 (43). URL: https://cyberleninka.ru/article/n/ispolzovanie-dvumernyh-shtrihkodov-dlya-sozdaniya-sistemy-pozitsionirovaniya-i-navigatsii-v-pomeschenii (дата обращения: 14.12.2021).
- Ozdenizci B, Coskun V, Ok K. NFC internal: an indoor navigation system. Sensors (Basel). 2015 Mar 27;15(4):7571-95. doi: 10.3390/s150407571. PMID: 25825976; PMCID: PMC4431189.
- Алутин Е.А. Анализ производительности алгоритмов поиска пути для графа навигации / Алутин Е.А., Мальчева Р.В. //
- Койбаш А.А. Прогнозирование траектории движения подвижного объекта распределенного симулятора тяжелой инженерной техники / А. А. Койбаш, С. В. Кривошеев // Информатика, управляющие системы, математическое и компьютерное моделирование (ИУСМКМ – 2016): материалы VII междунар. науч.-техн. конф., Донецк, 2016. / редкол. А. Ю. Харитонов и др. Донецк: ДонНТУ, 2016. С. 343–346.
- Алутин Е.А. Система поиска и построения маршрутов внутри помещения с помощью путевых карточек / Алутин Е.А., Кривошеев С.В. // ПРОГРАММНАЯ ИНЖЕНЕРИЯ: МЕТОДЫ И ТЕХНОЛОГИИ РАЗРАБОТКИ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМ (ПИИВС-2020) сборник научных трудов III Международной научно-практической конференции (студенческая секция). Донецк, 2020, с. 155-161.
- MotionLayout [Электронный ресурс] // Android Developers. – URL: https://developer.android.com/reference/androidx/constraintlayout/motion/widget/MotionLayout