Классификация паралельных структур механизмов 3Д принтеров
Автор: Горобец И.А., Киселица Д.О., Жарких Д.С.
Источник:ИНЖЕНЕР: студенческий научно-технический журнал. – Донецк, ДонНТУ, 2022. - № 1(33). С. 22-26.
Аннотация
Горобец И.А., Киселица Д.О., Жарких Д.С. Классификация паралельных структур механизмов 3Д принтеров. Рассмотрены вопросы классификации параллельных структур механизмов 3D-печати. Исследованы параметры механизмов параллельных структур. Даны рекомендации применения вариантов параллельных структур при синтезе конструкции принтеров аддитивных технологий.
Ключевые слова:принтер, технологии, структура, параметры, классификация.
В настоящее время, 3D-печатные технологии широко используются в архитектуре, строительстве, промышленном дизайне, автомобильной, аэрокосмической, военно-промышленной, медицинской отраслях, биоинженерии, лёгкой и пищевой промышленности. Перспективными идеи использования аддитивных технологий являются и в машиностроении, что позволит значительно уменьшить производственные площади, парк классического и массивного технологического оборудования, объёмы потребляемой электрической энергии и численность работающего персонала в производстве. [1-3] Известные конструкции механической части, 3D-принтеров используют принципы классических и параллельных структур.[4] Наиболее перспективными с точки зрения точности позиционирования, кинематических и динамических параметров, производительности, на наш взгляд, являются параллельные структуры конструкции 3D-принтеров. На сегодняшний день различают следующие виды параллельных структур: планарные, пространственные, избыточные, шарнирные фермы, проводные роботы и микроэлектромеханические системы (рис. 1).

Рисунок 1 – Классификация параллельных структур.
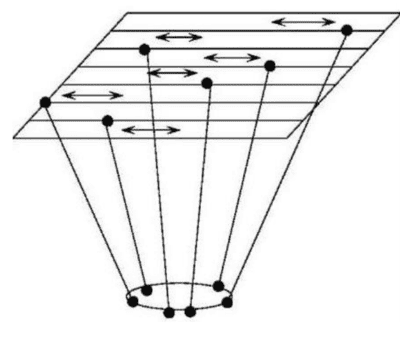
• Планарные. Особенность движения состоит в выполнении движений. траектория в одной плоскости. Планарные системы могут быть с двумя или с тремя степенями свободы. Увеличение степеней свободы переводит такие системы в пространственные.
Возможные варианты реализации плоских параллельных структур с двумя степенями свободы приведены на рис. 2. Активные вращающиеся шарниры представлены белыми кругами, пассивные – черными. Кинематическая цепь плоской структуры с тремя степенями свободы может описываться последовательностью трёх шарниров, расположенных от основания к верхней платформе. Цепи могут находится в последовательностях: RRR, RPR, RRP, RPP, PRR, PPR, PRP, PPP. Последовательность PPP исключается, поскольку движение шарниров должно оставаться независимым.
• Пространственные параллельные структуры. Классифицируются в соответствии с количеством степеней свободы. Различают структуры с тремя (перемещающие, ориентационные, с переменными степенями свободы), четырьмя, пятью и шестью (UPS-, PUS-топологией, с переменными звеньями, трёхногие, разделённые) степенями свободы. Возможные варианты реализации схем конструкций пространственных параллельных структур приведены в таблице 1.
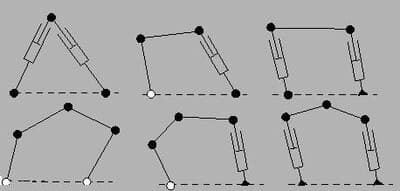
Рисунок 2 – Плоские структуры с двумя степенями свободы.
• Избыточные структуры. Избыточность параллельных структур позволяет решать важные и сложные вопросы, например, как предотвращение появления сингулярностей или решение проблемы прямой кинематики. Избыточность может быть использована при проектировании отказоустойчивых параллельных структур. [5]
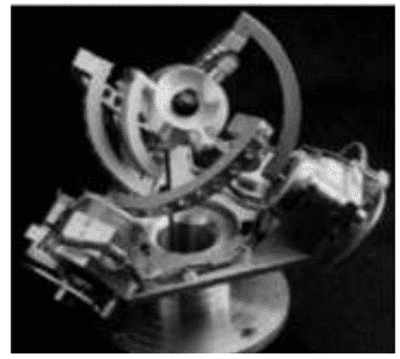
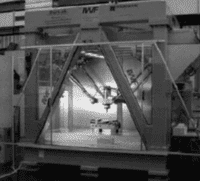
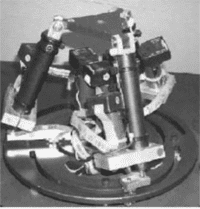
• Шарнирные фермы. Такие конструкции являются примером чрезвычайно избыточных параллельных структур. Состав шарнирной фермы представляет собой последовательно соединённые группы механизмов параллельных структур. Примером является робот LX4 (компания Logabex), на рис. 3. Этот тип манипулятора интересен тем, что его рабочее пространство очень большое, и отношение полезная нагрузка/масса имеет высокий показатель (масса LX4 составляет 120 кг, а масса транспортабельного груза 75 кг). Недостатком такой структуры является сложность системы управления.
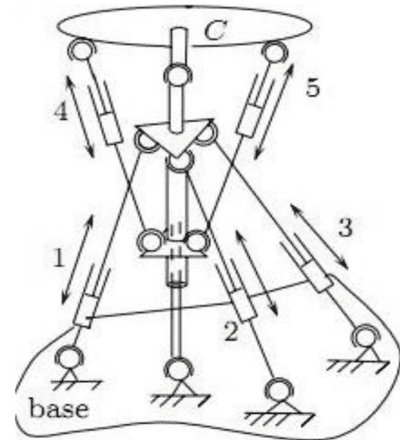
• Микроэлектромеханические системы (MEMS). С помощью таких систем реализуются устройства с высокой жёсткостю и точностью. Пример - платформа Gough (Portman).[6] Движения в этом устройстве реализуются небольшими изменениями длин ног из-за деформации полого цилиндра гидравлическим давлением (рис. 4).
Табл. 1 Классификация пространственных структур механизмов
| Ст.св. | Дополнительные признаки | Кинематическая структура | Оси | Особенности | Применение | Пример | Рисунок |
| 1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
| 3 |
Перемещающие |
.png)
|
Y, X, Z |
Все кинематические цепи этого робота имеют тип rrpr |
Операции механической обработки и перегрузки |
DELTA – FLEXPICKER IRB 340 |

|
| 3 |
Ориентационные |
.png)
|
U, V, W |
Цепи позволяют выполнять три вращения вокруг одной точки |
Системы наблюдения |
АGILE ЕYE |
|
| 3 |
С переменными степенями свободы |
|
Y, U, V |
Принцип построения определяется в основном типами используемых шарниров |
Балансирование рычага космического корабля и микроманипулятор |
ARTISAN |

|
| 4 |
- |
|
Y, U, V, W |
Структура механизма с пассивной системой ограничения |
Пилотажный тренажер |
KOEVERMANS |

|
| 5 |
- |
|
Y, X, Z, U, W |
Пассивная опора создаёт высокие показатели жёсткости, но уменьшает рабочие пространство |
Машиностроение, 5-координатная обработка |
AUSTAD |

|
| 6 |
С pus - структурой |
|
Y, X, Z, U, V, W |
Направления движения приводов не имеют значения: наклонные, горизонтальные, вертикальные |
Металлорежущие станки |
HEXAGLIDE |
|
| 7 |
Трёхногие |
|
Y, X, Z, U, V, W |
Уменьшен риск столкновения ног, увеличен размер рабочего пространства, но уменьшена жёсткость и увеличена ошибка позиционирования |
Быстропозиционирующие устройства |
RRPS - робот |
|

Рисунок 3 – Вид робота LX4.
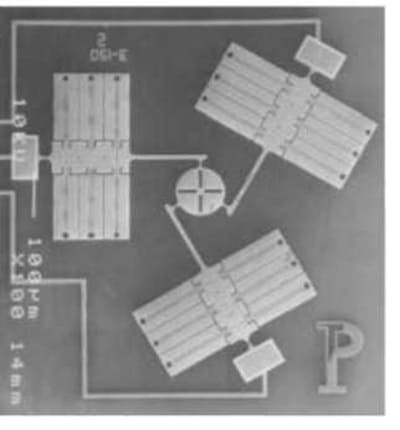
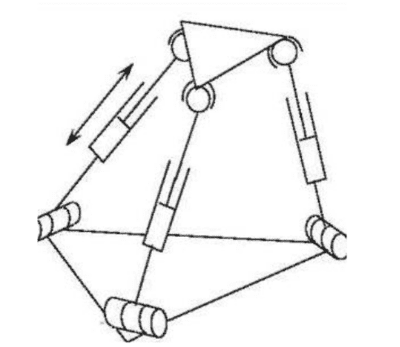
Рисунок 4 – плоский механизм 3-RRR.
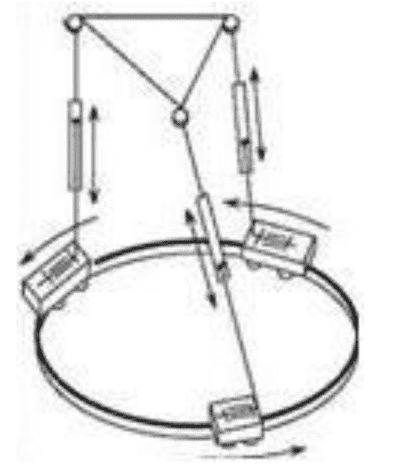
• механизмы с гибкой структурой звеньев. Замена твёрдых связей проводами или тросами (которые могут быть намотаны или размотаны) в механизмах, имеет следующие преимущества:
- большее рабочее пространство, поскольку провода учитывают большие изменения в длинах звеньев и упрощают управление;
- меньшая мобильная масса, а значит высокая динамика;
- низкое взаимодействие с пользователем, которое может быть полезным для тактильных устройств.
Но наличие гибких структур налагают ограничение в механизме: они могут растягиваться, но не могут сжиматься. Такое ограничение играет важную роль в вычислении многих действий механизма.
Использование такого устройства – задачи, требующие высокую скорость: ультрабыстрая сборка или 3D-печать.
Выводы. Таким образом, зная особенности классификации, параметры, характеристики структур механизмов можно корректировать синтез конструкции механических устройств для реализации аддитивных технологий.
Список использованной литературы
1. Сферы применений аддитивных технологий [Электронный ресурс] - М.: Изд. Эра 3D,- 2017. —Режим доступа: https://era-3d.ru/baza-znaniy/poleznaya-informatsiya/sfery-primeneniya-additivnykh-tekhnologiy
2. Суть и преимущества аддитивных технологий и производства [Электронный ресурс] - М.: 2016. — Режим доступа: https://top3dshop.ru/wiki/additive-technologies.html
3. Горобец, И.А. Методы и применимость аддитивных технологий в машиностроении / И.А.Горобец, Н.В.Голубов, А.М.Лахин, Д.О.Киселица, Д.С.Жарких /ИНЖЕНЕР: студенческий научно-технический журнал. – Донецк, ДонНТУ, 2022. - № 1(33). С. 22-26.
4. Горобец, И.А. Исследование структурных схем конструкций 3D-принтера / И.А.Горобец, А.М.Лахин, Д.О.Киселица, Д.С.Жарких / Машиностроение и техносфера XXI века. Сборник трудов XXIX международной научно-технической конференции в г. Севастополе 12-18 сентября 2022 г. – Донецк: ГОУВПО ДОННТУ, 2022. – С. 81-85.
5. Notash,L. On the design of fault tolerant parallel manipulators. Mechanism and Machine Theory / L.Notash, L.Huang - 2003, - Vol. 38(1), S.85–101
6. Portman,V.T. Rigid 6x6 parallel platform for precision 3D micromanipulation: theory and design application./ V.T.Portman., B.Z/Sandler, E.Zahavi - IEEE Trans. on Robotics and Automation, 2000, -VOL.16(6), S.629–643