Выбор структурной схемы конструкции 3Д принтера
Автор:Горобец И.А., Лахин А.М., Киселица Д.О., Жарких Д.С.
Источник:ИНЖЕНЕР: студенческий научно-технический журнал. – Донецк, ДонНТУ, 2022. - № 2(34). С. 23-26.
Аннотация
Горобец И.А., Лахин А.М., Киселица Д.О., Жарких Д.С. Выбор структурной схемы конструкции 3Д принтера.
Рассмотрены вопросы выбора рациональной структурной схемы конструкции принтера для 3D-печати. Исследованы параметры механизмов параллельных структур.
Даны рекомендации использования вариантов схем параллельных структур при синтезе конструкции 3D - принтеров.
Ключевые слова:принтер, технологии, структура, параметры, схема.
Идея аддитивного изготовления (или 3D-печати) объекта основана на концепции построения изделия последовательно наносимыми слоями, отображающими контуры объекта, с использованием цифровой модели создаваемого изделия. При этом, каждый из наносимых слоёв материала увеличивает объем и вес изготавливаемой заготовки. В пятёрке передовиков внедрения аддитивных технологий находятся Япония, Германия, Китай и Великобритания. В России такие технологии используются на известных фирмах: ФГУП «НАМИ», НПО «Салют», АБ «Универсал», НИИ «Машиностроительные Технологии». [1,2]
Для реализации аддитивных технологий в 3D- принтерах чаще всего используются структуры картезианского типа, основанные на возможности линейного перемещения экструдера в трёх измерениях. [3] Однако, существуют и другие типы конструкции, например, использующие принцип параллельных структур. [4,5] С целью отыскания наилучшего решения схемы конструкции 3D-принтера для повышения его производительности и точности, рассмотрим вероятные структурные схемы на основе параллельных структур.
Структурные схемы механизма 3D-принтера состоят из простых кинематических пар, какими являются: R – вращательная пара, P – поступательная пара, S – шаровой шарнир, C – цилиндрическая пара, H – винтовая пара, U – карданное соединение. Каждая простая кинематическая пара имеет определённое количество степеней свободы. [6] Основными типами пространственных параллельных устройств с кинематическими структурами, обеспечивающими три степени свободы, являются устройства, которые имеют или один активный поступательный шарнир в кинематической цепи, или один активный вращательный шарнир.
Принцип действия параллельных устройств с активным поступательным шарниром основан на изменении положения подвижной платформы при изменении длин звеньев с помощью поступательных кинематических пар.
Структуры, содержащие активную поступательную пару, в свою очередь, подразделяются на две группы, со звеньями постоянной длины и со звеньями переменой длины. К таким механизмам относятся устройства с UPU-, SPS-, UPS-, SPU-, PUU-структурами (рис. 1).
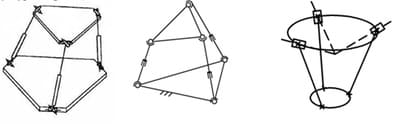
Рисунок 1 – Структурные схемы UPU-, SPS-, PUU- устройств.
Устройства со структурой UPU-, SPS-, UPS- и SPU имеют кинематические звенья пар переменной длины. Длина цепи варьируется с помощью призматической кинематической пары. Принцип действия таких устройств основан на зависимости положения подвижной платформы относительно неподвижной, от длины каждого из звеньев кинематической пары. Устройство со структурой PUU имеет кинематические звенья постоянной длины. Положение подвижной платформы относительно неподвижной изменятся с помощью линейных приводов, которые также являются кинематическими поступательными парами.
Устройства с вращательным активным шарниром называют Delta –структурами. Устройство состоит из трёх рычагов, прикреплённых посредством карданных шарниров к неподвижной платформе. Особенностью схемы конструкции является использование параллелограммов, что позволяет сохранять пространственную ориентацию исполнительного механизма, рис. 2 а.
Параллельной кинематической структурой обладает и конструкция Tricept, Схема конструкции такого устройства состоит из четырёх кинематических звеньев, включая три идентичные активные пары и одно пассивное звено, соединяющее неподвижную основу с движущейся платформой. Каждая активная кинематическая пара содержит карданный шарнир, установленный на неподвижной платформе, изменяемое по длине звено с приводимым в движение призматическим шарниром и сферическим шарниром, прикреплённым к движущейся платформе. При этом, пассивное кинематическое звено в виде телескопической трубы, находится в середине конструкции устройства для ограничения движения платформы только тремя степенями свободы, рис.2 б.
Структура параллельного механизма Orthoglide, состоит из трёх параллельных идентичных кинематических пар. Активными шарнирами устройства являются три ортогональных призматических шарнира. Подвижная платформа связана с призматическими шарнирами с помощью трёх параллелограммов. Таким образом, конструкция может совершать только поступательные перемещения. Особенностью этой структуры является отсутствие возможности столкновений звеньев устройства, рис.2 в.
Выбор рациональной структурной схемы конструкции 3D- принтера на основе структуры параллельных механизмов, является сложной задачей, решение которой должно быть обусловлено многими факторами и критериями оценки.

Рисунок 2 – Структуры: а) Delta, б) Tricept и в) Orthoglide, соответственно.
Наиболее весомыми критериями оценки пригодности параллельной структуры механизма для использования в конструкции 3D-принтера, табл.1, являются:
• количество и сложность кинематических пар,
• количество приводов,
• реализуемое количество степеней свободы,
• сложность решения обратной и прямой задачи кинематики,
• динамические характеристики,
• система управления,
• скорость работы 3D-принтера,
• реализуемая рабочая зона,
• сложность структуры,
• отношение рабочей зоны 3D-принтера к объёму, занимаемому его конструкцией и пр.
Табл. 1 Критерии и оценки возможных структур робота
| Критерий оценки/Вариант структуры | 3-UPU | 3-SPS | 3-PUU | Delta | Tricept | Orthoglide |
| количество кинематических пар |
9 |
9 |
9 |
9 |
10 |
9 |
| сложность кинематических пар |
15 |
21 |
15 |
9 |
17 |
9 |
| количество приводов |
3 |
3 |
3 |
3 |
3 |
3 |
| количество степеней свободы |
3 |
3 |
3 |
3 |
3 |
3 |
| обратная задача кинематики |
9 |
8 |
8 |
9 |
9 |
8 |
| прямая задача кинематики |
7 |
10 |
6 |
8 |
8 |
6 |
| динамика |
10 |
8 |
8 |
8 |
8 |
8 |
| управление |
9 |
10 |
8 |
9 |
8 |
8 |
| скорость |
8 |
8 |
7 |
6 |
10 |
8 |
| рабочая зона |
6 |
6 |
6 |
7 |
8 |
10 |
| сложность структуры |
7 |
7 |
7 |
9 |
10 |
8 |
| рабочая зона / конструкция |
7 |
7 |
6 |
7 |
8 |
10 |
| Итого |
93 |
100 |
86 |
87 |
102 |
90 |
Из анализа результатов табл.1, можно сделать вывод о минимальных значениях суммарных численных параметров в структурах 3-PUU и Delta, которые можно рекомендовать для реализации кинематики механической части 3D-принтера с тремя степенями свободы. Структуры Tricept и 3-SPS содержат более сложные кинематические пары, а структура Orthoglide - имеет относительно небольшую рабочую зону.
Выводы. Использование новых технологий получения изделий машиностроения является актуальной задачей современной промышленности. Одной из реализаций новейших подходов решения таких задач являются аддитивные технологии. Исследования схем конструкций технологического оборудования аддитивных технологий выявили особенности кинематических структур механической части 3D-принтеров. Рассмотрены актуальные схемы высокоточных и производительных параллельных структур, кинематики механической части технологического оборудования для реализации аддитивных технологий. Дан анализ параллельных кинематических структур 3D-принтеров и предложены их наилучшие решения в виде структур 3-PUU и Delta.
Список использованной литературы
1. Носков, О. Еще раз догнать Америку [Электронный ресурс] – М.: Академгородок – 2017. — Режим доступа: https://academcity.org/content/eshche-raz-dognat-ameriku
2 Сферы применений аддитивных технологий [Электронный ресурс] - М.: Изд. Эра 3D,- 2017. — Режим доступа: https://era-3d.ru/baza-znaniy/poleznaya-informatsiya/sfery-primeneniya-additivnykh-tekhnologiy
3. Горобец, И.А. Методы и применимость аддитивных технологий в машиностроении / И.А Горобец, Н.В.Голубов, А.М.Лахин, Д.О.Киселица, Д.С.Жарких/ ИНЖЕНЕР: студенческий научно-технический журнал. – Донецк, ДонНТУ, 2022. - № 2(34). С. 23-26.
4. Merlet J.-P. “Parallel Robots. Second Edition.” – Springer, 2006
5. Raza Ur-Rehman. Multiobjective Optimization of Parallel Robots and Optimal Path Placement. Robotics - Ecole Centrale de Nantes (ECN), 2009.
6. Тимофеев, Г.А. Теория механизмов и машин: учебник и практикум для прикладного бакалавриата/ Г.А.Тимофеев – М.: Изд. «Юрайт», 2019 – 368с.