Система автоматического определения габаритов груза
Автор: К. А. Солодухин, С. Сингх, А. В. Хорхордин
Источник: Сборник научных трудов конференции Автоматизация технологических объектов и процессов. Поиск молодых
, Донецк: ДонНТУ, 2021. - с. 308-310.
Вступление
Развитие и применение цифровых технологий в сфере обслуживания и торговли привело к резкому росту почтовых отправлений от предприятия – Интернет магазина к покупателю. Гигантами в сфере онлайн-шопинга сегодня признаны amazon.com, еbay.com, alibaba.com, walmart.com, bestbuy.com и др. Поток грузов от них к покупателям требует безошибочного дифференцирования по направлениям доставки, по средствам доставки и не в последнюю очередь по габаритам груза. Последнее особенно важно для решения вопроса о количестве контейнеров для доставки груза и для оптимальной загрузки каждого контейнера. Ясно, что гиганты интернет-торговли располагают сегодня современными дорогостоящими системами автоматизированной обработки грузов, однако, рынок онлайн-шопинга нуждается в более простых и недорогих, но достаточно надежных системах определения габаритов груза. Следует учесть и интересы почтовых отделений в крупных населенных пунктах, интересы авиакомпаний, интересы промышленного производства, где также возникает необходимость автоматической оценки габаритов грузов и изделий.
Почтовые отправления получателям и посылки от интернет-магазина покупателям, как правило, упаковываются в картонные коробки в форме параллелепипеда, причем размеры коробки соответствуют некоторому стандартному ряду. Так, например, Почта России использует коробки размером от 260×170×80 мм (Тип S) до 530×360×220 мм (Тип XL). Наряду с коробками часто используются пакеты почтовые полиэтиленовые с клапаном размером от 114×162 мм до 500×545 мм. Нередко имеют место случаи, когда отправляемый товар является неделимым и не вписывается в стандартные размеры. Отсюда возникает задача автоматического определения габаритов грузов (почтовых посылок) как стандартного типоразмера, так и отличных от стандартного.
Постановка задачи
Необходимо разработать автоматическую систему определения габаритов грузов, имеющих форму параллелепипеда, на основе применения элементов искусственного интеллекта (нейросети), позволяющую по результатам обработки видеоизображения, получаемого с типовой видеокамеры (веб-камеры, фото или видео из смартфона) определять габариты груза. Положение груза под видеокамерой – произвольное (не строго ориентированное). С целью обеспечения невысокой стоимости системы для технической реализации системы определения габаритов грузов использовать одноплатную ЦВМ типа RaspberryPi и программное обеспечение типа OpenCV.
Анализ решений и разработка концепции построения системы
Разработанные проекты распознавания габаритов объектов зачастую используют аппаратные средства распознавания, такие как ультразвуковые, инфракрасные датчики и т.д.. Что даёт высокую скорость распознавания, однако, имеет ограничения по максимальным габаритам изменяемых объектов. Для расширения диапазона измерения необходимо увеличивать количество аппаратных средств, что влечёт дополнительные затраты на реконфигурирование налаженной системы.
Одним из типичных представителей данной концепции, является SENSOTEC VolumeOne (рис.1). Определение габаритов производится путём использования трёх ультразвуковых датчиков, расположенных на трёх осях координат (XYZ).
Рисунок 1 – SENSOTEC VolumeOne
На текущий момент ведутся разработки по внедрению интеллектуальных алгоритмов в сфере распознавания габаритов объектов. Использование интеллектуальных алгоритмов расширяет границы измерения объектов, а также, при правильном обучении, даёт возможность измерять грузы сложных форм. Применение интеллектуальной концепции, позволит уменьшить поток получаемых данных в несколько раз, за счёт использование нескольких камер, что влечёт уменьшение общей ошибки по измеренным габаритам объектов. Но, возникают требования по качеству получаемого изображения.
Системы, использующие такую концепцию, имеют высокое быстродействие, и как правило, применяются там, где требуется обрабатывать большие потоки данных (рис.2).
Рисунок 2 – APACHE Parcel Conveyor
Описание алгоритма работы разрабатываемой системы
При создании интеллектуальной системы измерения габаритов, можно отталкиваться от нескольких вариаций одной интеллектуальной концепции:
- с одной видеокамерой без дополнительной подсветки груза;
- с двумя (и более) видеокамерами без подсветки груза;
- с одной камерой и с синхронной импульсной подсветкой груза от одного источника света.
В первом случае, требуется размещать камеру под некоторым углом, чтобы захватывать три грани параллелепипеда. Скорость вычислений, как и точность в этом варианте будет не очень высокой, из-за больших вычислений в 3D пространстве. Использование двух камер, повышает точность, однако, стоимость в денежном эквиваленте такого решения, довольно спорна. Сюда же, необходимость синхронизовать между собой полученные изображения для обработки. Использование одной камеры и подсветки с одной стороны, даёт полную информацию об объекте (рис.3), не увеличивая сложность вычислений. Камера, расположенная под 270 градусов к области измерения, может измерять довольно простым алгоритмом длину и ширину объекта. А отбрасываемая тень, путём математических вычислений (от расположения источника освещения, до границы тени), можно определить его высоту.
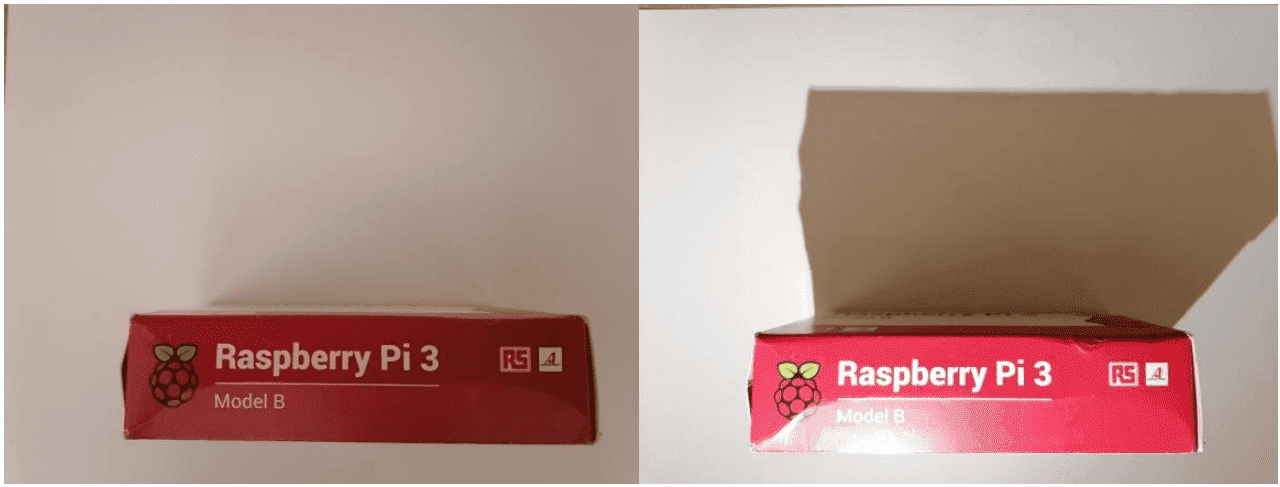
Рисунок 3 – Предложенная концепция определения габаритов грузов с использованием освещения измеряемого объекта с одной стороны
Помещая груз в область измерения, данную операцию регистрирует камера, и производит фоторегистрацию объекта. Т.к. система предусматривает произвольное расположение объектов, то должен присутствовать алгоритм, который будет нормировать полученное изображение относительно некоторых осей [1], для упрощения работы последующих алгоритмов.
После нормализации изображения, в дело вступает интеллектуальный алгоритм [2], который выполняет две задачи: - определение длины и ширины; - определения высоты по отбрасываемой тени объекта.
Аппаратным средством выполнения, как описывалось выше, предполагается выбрать RaspberryPi. RaspberryPi является быстро действенным одноплатным микрокомпьютером с возможностью подключения к нему различного вида датчиков. Процессор также даёт возможность обработки видео в больших объемах. В качестве программного средства, следует выбрать OpenCV – Python. OpenCV, открытая платформа для работы с видео и фото, включающая в себя как официальную так и пользоватскую библиотеку работы компьютерного зрения.
Вывод
Интеллектуальные алгоритмы всё больше находят своё применения в разных областях, и область определения габаритов грузов не обошла стороной. На данный момент, это направление является наиболее перспективным и быстро развивающим. Использование камер увеличивает пределы измерений, и при правильном постановке алгоритма, даёт возможность измерять габариты сложных форм.
Использование предложенного интеллектуального алгоритма определения габаритов грузов, имеет ряд существенных преимуществ. Из ключевых, использование минимального количества камер, и также, простой алгоритм, который будет не требователен к вычислительным мощностям ЦВМ.
Перечень ссылок:
- Criminisi A., Reid I., Zisserman A. Single View Metrology // International Journal of Computer Vision. 2000. V. 40, I. 2. P. 123–148
- Fischler M.A., Bolles R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. 1981