
Рисунок 1 – Кислородный турбокомпрессор как объект управления
Автор: Воронцов Н.Н., Федюн Р.В., Попов В.А.
Источник: Автоматизация технологических объектов и процессов. Поиск молодых: сборник научных трудов ХХII международной научно-технической конференции аспирантов и студентов в г. Донецке 24-26 мая 2022 г. – Донецк: ДОННТУ, 2022. – С. 232 – 234.
Для обеспечения нормального режима работы и своевременного обнаружения нарушений в работе кислородного турбокомпрессора необходим постоянный контроль ряда параметров, анализ ситуации, выдача управляющих воздействий и аварийных сигналов при отклонении контролируемых параметров.
Вследствие вышесказанного следует выделить контроль и регулирование давления и расхода, которые являются ключевыми параметрами для полноценной работы компрессора.
Для успешного регулирования давления на выходе компрессора требуется высокое быстродействие системы автоматического управления и малая инерционность системы.
Исходя из вышеизложенного, определены регулируемые переменные, управляющие и возмущающие воздействия (рис. 1) [1].
Рисунок 1 – Кислородный турбокомпрессор как объект управления
Основным регулируемым параметром кислородного турбокомпрессора является давление кислорода на выходе компрессора Pк (рис.1). Управляющим воздействием является производительность турбокомпрессора Fтк. Основным возмущающим воздействием является расход потребляемого кислорода Fк.
Наиболее применяемым при разработке САУ, в настоящее время, является принцип обратной связи или принцип управления по отклонению. Принцип построения САУ по отклонению (принцип обратной связи) с помощью одного основного контура управления для данного объекта – кислородного турбокомпрессора не позволяет получить требуемую эффективность управления, так как останется неучтенным основное возмущение по потребляемому расходу кислорода, без которого будет невозможно точно регулировать постоянно изменяющееся значение давления на выходе компрессора за счёт изменения производительности компрессора. В свою очередь применение комбинированного принципа управления предусматривает одно временное использование управления по отклонению и управления по возмущению, объединяя преимущества двух принципов управления в одной системе.
Для формирования управляющего воздействия в комбинированных системах управления используется как непосредственная информация об основных возмущающих воздействиях, так и отклонение управляемой величины от требуемого значения, вызываемое всеми возмущающими воздействиями (или изменением задающего воздействия). Благодаря этому:
–в комбинированных системах управления с помощью компенсационных каналов возможно достижение полной компенсации (устранения) ошибок, вызываемых основными возмущающими и задающим воздействиями (возможно достижение инвариантности);
–наряду с возможностью полной компенсации ошибок, вызываемых основными возмущающими воздействиями, в комбинированных системах управления с помощью обратной связи уменьшаются ошибки, вызываемые не основными (дополнительными) возмущающими воздействиями, по которым не целесообразно реализовывать компенсационные каналы, а также не до конца компенсированные ошибки от основных возмущающих воздействий;
–при нарушении условий компенсации возмущающего воздействия возникающая ошибка уменьшается замкнутой системой, т. е. комбинированные системы менее чувствительны к изменениям параметров разомкнутых каналов, чем разомкнутые САУ.
Комбинированная САУ кислородным турбокомпрессором представляет собой совокупность объекта управления, регулятора и датчика, а регулирование осуществляется по управляемой переменной и по основному возмущающему воздействию (рис. 2).
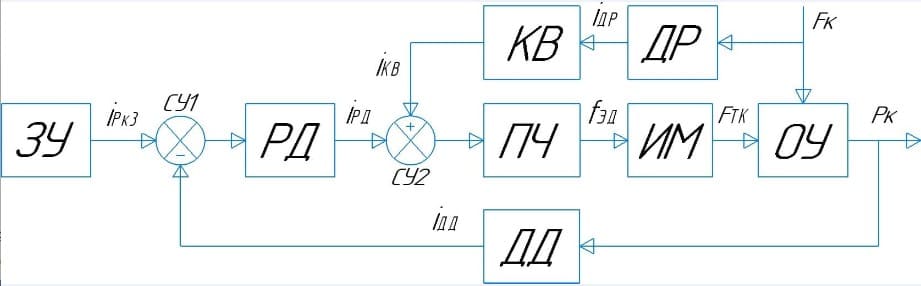
Рисунок 2 – Комбинированный принцип управления кислородным турбокомпрессором
Функциональные элементы системы: ОУ – объект управления (кислородный турбокомпрессор); ЗУ – задающее устройство; ДД – датчик давления; ДР – датчик расхода; СУ1, СУ2
–сравнивающие устройства; РД – регулятор давления; ПЧ – высоковольтный частотный преобразователь; ИМ – исполнительный механизм (двигатель турбокомпрессора).
Принцип функционирования САУ кислородным турбокомпрессором с применением комбинированного принципа управления, заключается в следующем: производится измерение давления датчиком (ДД), управляемой переменной PК, токовый сигнал IДД, с помощью сравнивающего устройства (СУ1) сравнивается с токовым задающим сигналом IРК3. Элемент сравнения формирует сигнал рассогласования, который поступает на регулятор (РД), где формируется управляющее воздействие IРД с помощью регулятора давления (РД). С помощью датчика расхода (ДР), измеряется основное возмущение – потребляемый расход (FК) и сигнал поступает на компенсатор возмущения (КВ), который формирует сигнал ошибки (IКВ) изменяющегося возмущения и поступает на сравнивающее устройство (СУ2), которое сравнивает сигнал с IРД и с учётом изменяющегося возмущения, формирует общее управляющее воздействие IПЧ для преобразователя частоты (ПЧ), тот в свою очередь формирует и выдает управляющее воздействие в виде требуемого изменения частоты питающего напряжения (fЭД) на исполнительный механизм (ИМ), для требуемого изменения частоты вращения его вала, с помощью которого производится регулирование производительности всего объекта управления (ОУ), изменение производительности турбокомпрессора приводит к соответствующему изменению давления кислорода PК на выходе компрессорной установки.
На основе анализа особенностей кислородного турбокомпрессора как объекта автоматического управления [1] и предложенной выше концепции построения САУ (рис.2), разработана структурная схема САУ давлением кислорода кислородного турбокомпрессора, которая приведена на рис.3.
Рисунок 3 – Структурная схема САУ давлением кислородного турбокомпрессора
Согласно полученной структурной схемы (рис.3), система автоматического управления давлением кислородного турбокомпрессора состоит из следующих элементов: WТК1(p) и WТК2 (p) – передаточные функции турбокомпрессора; WЭД(p) – передаточная функция приводного электродвигателя кислородного турбокомпрессора; WПЧ(p) – передаточная функция пре- образователя частоты; WРД(p) – передаточная функция регулятора давления; WКВ (p) – переда – точная функция компенсатора возмущения; WДР(p), WДД(p) – передаточная функция датчика расхода кислорода и датчика давления.
Разрабатываемая САУ реализуется с использованием комбинированного принципа управления: с обратной связью по управляемой переменной – давлению кислорода на выходе турбокомпрессора РК и компенсационным каналом по основному возмущению– потребляемому расходу кислорода FК (рис.3).
В разрабатываемой САУ управляемая переменная – давление кислорода на выходе турбокомпрессора РК, измеряемая датчиком давления WДД(p), преобразуется в соответствующий электрический сигнал постоянного тока iДД. Выходной сигнал датчика давления iДД сравнивается с токовым сигналом iРК3, который является задающим воздействием в САУ и величина которого определяется по требуемому значению давления кислорода на выходе компрессора РКЗ = 1,6 МПа (рис.3). Сигнал рассогласования поступает на регулятор давления WРД (p), кото рый формирует управляющее воздействие iРД.
В компенсационный канал по возмущению – потребляемому расходу кислорода FК входит датчик расхода кислорода WДР(p) и компенсатор возмущения WКВ(p) (рис.3). Данный канал позволяет учесть в общем управляющем воздействии iПЧ влияние изменяющегося возмущающего воздействия – потребляемого расхода кислорода за счет добавления в общее управляющее воздействие iПЧ сигнала компенсатора возмущения iКВ (рис.3).
Общее управляющее воздействие iПЧ подается на исполнительное устройство, функции которого в разрабатываемой САУ выполняет преобразователь частоты WПЧ (p), который формирует и выдает управляющее воздействие в виде требуемого изменения частоты питающего напряжения fЭД на приводной электродвигатель турбокомпрессора WЭД(p) для требуемого изменения частоты вращения его вала nТК. Вследствие этого изменяется частота вращения вала турбокомпрессора nТК и, соответственно, производительность FТК кислородного турбокомпрессора. Изменение производительности турбокомпрессора приводит к соответствующему изменению давления кислорода РК на выходе турбокомпрессора (рис.3).