2.
Конфигурация оборудования
Аппаратная
конфигурация показана на рисунке 1. В качестве источника света используется
перестраиваемый лазер с шагом перестройки 10 пм. Лазер может сканировать всю
полосу C с шагом 10 пм в
течение менее 300 миллисекунд. Отраженный свет направляется в фотодетектор без
элементов оптической дисперсии. Обнаруженный электрический сигнал подключается
к встраиваемой компьютерной системе STM32F4 и преобразуется в цифровой сигнал с помощью встроенного
в систему АЦП. Затем STM32F4 считывает данные и определяет пик с помощью подгонки
кривой Гаусса.
В качестве
источника света используется недорогой перестраиваемый лазер, поэтому
громоздкое и часто дорогое устройство рассеивания света не требуется.
Встраиваемая ARM-система STM32F4 используется
для получения данных и обнаружения пика [5]. Преимуществами системы STM32F4 являются
простота конструкции, высокая скорость, низкая стоимость и небольшой размер,
поэтому нет необходимости в использовании громоздкого и дорогостоящего
персонального компьютера.

Рис. 1 Схематическая
диаграмма системы
Система STM32F4 также может взаимодействовать с
главным компьютером через сетевой порт, порт USB, поэтому исходные данные и
результат обнаружения пика могут быть отправлены на другой компьютер через эти
порты для дальнейшей обработки.
3.
Подгонка кривых
Для подгонки гауссовой кривой используется алгоритм
Левенберга-Марквардта (LM). Алгоритм LM был предложен Левенбергом после инспирации
Марквардтом. Алгоритм LM представляет собой комбинацию метода Ньютона и метода
крутого спуска, который обладает высокой скоростью итераций и точностью
подгонки. Алгоритм LM является стандартом для решения задачи нелинейных наименьших квадратов
[6].
Алгоритм LM реализован на STM32F4 с использованием языка
программирования C. Алгоритм может подгонять как одиночные пики, так и многопиковые. Подгонка
выполняется очень быстро, требуется всего около 70 мс, что намного меньше
времени сканирования данных.
4.
Результаты и анализ
Сначала был подключен только один FBG. Исходные данные и подогнанная кривая показаны на
рисунке 2. Было проведено 10 измерений, и погрешность пиковой длины волны
составила 0,87 pm.
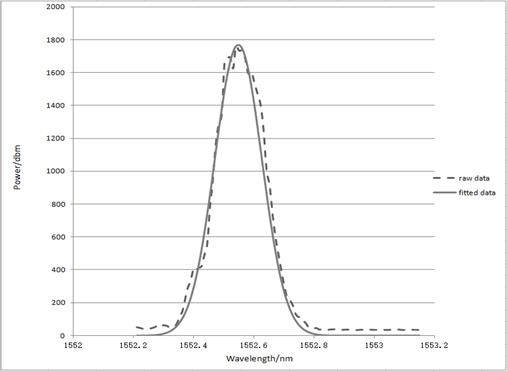
Рис. 2 Данные
для одной длины волны
Затем были подключены три FBG для проверки
возможности обнаружения нескольких пиков. Результат подгонки показан на рисунке
3.
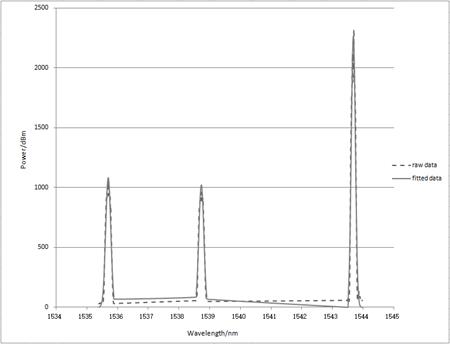
Рис. 3 Многоволновые
данные, подогнанные по длине
Погрешность
примерно такая же, как и для одной длины волны. Для подгонки трех пиков
требуется около 70 мс. Подгонка одиночных пиков происходит гораздо быстрее.
Время подгонки намного меньше времени получения данных, составляющего около 300
мс. Подгонка и сбор данных запрограммированы на параллельную работу, поэтому
общее время одного измерения составляет около 300 мс. Таким образом, вся
система отвечает требованиям обработки данных в реальном времени.
5.
Вывод
В этой статье
демонстрируется недорогой и компактный демодулятор FBG. В качестве источника света
используется перестраиваемый лазер. Отраженный спектр может быть измерен
непосредственно для каждой длины волны без использования диспергирующего
элемента. Для получения и обработки данных используется встраиваемая
компьютерная система STM32F4. Система компактна и недорогая, так как не требует
громоздкого и дорогостоящего оптического диспергирующего элемента и персонального
компьютера. Быстрая подгонка гауссовой кривой по алгоритму LM была
реализована в STM32F4 с помощью
языка программирования c. Погрешность обнаруженного пика длины волны составляет
0,87 пм, а время, необходимое для обнаружения пика, составляет всего 70 мс.
[1]
A. D. Kersey,
M. A. Davis, H. J. Patrick, M. LeBlance, K.
P. Koo, C. G. Askins, M. A. Putnam,
and E. J. Friebele,” Fiber grating sensors,” J. Lightwave
Technol. Vol. 15, pp. 1442-1463, 1997.
[2]
K. O. Hill and G. Meltz, “Fiber Bragg grating technology:
fundamentals and overview,” J. Lightwave Technol.
Vol. 15,
pp. 1263-1276, 1997.
[3]
Yongqian Li, Yang Xie, Guozhen Yao, Comparison of Peak
Searching Algorithms for Wavelength Demodulation in Fiber Bragg Grating
Sensors, Information Engineering and Computer Science (ICIECS), 2010 2nd
International Conference on, pp. 1-4, 2010.
[4]
Lourakis Manolis I. A., Argyros Antonis A.SBA. A Software
Package for Generic Sparse Bundle Adjustment, Acm Transactions on Mathematical Softwave, vol. 36, no. 1,
pp. 2, 2009.
[5]
Li Dapeng, Cao Guohua, Chen Jiyan, Research of Array CCD
Imaging System Based on STM32F4, Advances in Education Research, vol. 30, pp.
79-84, 2013.
[6]
Elliott David, Johnston Barbara M., Johnston Peter R. The
method of steepest descent for estimating quadrature errors. Journal of
Computational and Applied Mathematics, vol. 303,pp. 93-104, 2016.