Введение
Одним из наиболее важных звеньев в комплексной механизации подземной добычи руды является процесс её перемещения от забоя до поверхности, включая операции выпуска, погрузки, доставки в пределах очистного забоя и транспортировки по магистральным выработкам до ствола шахты. На доставку руды приходится около 50 % всех затрат по её добыче. В настоящее время электровозная откатка является основным видом транспорта по главным откаточным выработкам. Применяемые при этом электровозы различны по типу и характеристикам. Область применения шахтных электровозов напрямую связана с уровнем их взрывозащиты. Тяговый электропривод рудничного электровоза работает в опасных условиях наличия пыли и рудничного газа (метана). Питание электровоза от контактной линии, в условиях загазованности, опасно при эксплуатации. Поэтому около 70 % электровозов в угольных шахтах питаются от аккумуляторных батарей. До недавнего времени электроприводы рудничных электровозов в основном строились на базе электродвигателей постоянного тока [1, 2]. Для управления использовались командоаппараты с несколькими ступенями регулирования. Основным недостатком применения машин постоянного тока является наличие щеточно-коллекторного узла, обуславливающего возникновение искрения, снижение надёжности и безопасности. Электровозы комплектуются оборудованием с уровнем рудничной взрывозащиты РВ (рудничное взрывобезопасное). Поэтому электродвигатели постоянного тока оснащаются взрывозащитной оболочкой, обеспечивающей защиту от возгорания или возникновения искры внутри корпуса. Совокупность существующих недостатков требует создания более безопасных электроприводов и систем управления.
Основное внимание при создании новых шахтных электровозов уделяется повышению скорости движения, тяговых и тормозных усилий, увеличению энергоёмкости аккумуляторных батарей, обеспечивающих больший пробег электровоза на одной зарядке аккумулятора.
Современные тяговые электроприводы рудничных электровозов глубоко интегрированы с системой управления электровоза в целом. Повышение безопасности рудничного производства связано с применением на электровозах бесконтактных тяговых электродвигателей, работающих от аккумулятора. Появление дешёвых высококоэрцитивных магнитов, создающих сильные магнитные поля в малых габаритах, определяет применение на электровозах тяговых синхронных двигателей с постоянными магнитами (СДПМ). Не имея скользящих контактов и не расходуя энергию на возбуждение, СДПМ выгодно отличается от других электрических машин [3, 4].
Особенностью синхронных машин с высококоэрцитивными магнитами является значительная магнитная проводимость поперечного потока по сравнению с проводимостью продольного потока при совпадении осей полюсов ротора и фазных обмоток статора [5]. Несмотря на простую конструкцию явнополюсной синхронной машины, различная магнитная проводимость продольной и поперечной оси затрудняет решение задачи управления. Транзисторная система широтно-импульсной модуляции обеспечивает формирование необходимого напряжения для реализации требуемых законов, исключая аварийные ситуации и перегрев тягового электродвигателя локомотива. Использование микропроцессорной техники позволяет без усложнения конструкции применять сложные законы управления электроприводом, обеспечивающего экономичное движение электровоза.
В настоящее время электромагнитный момент явнополюсной синхронной машины с постоянными магнитами формируют по наиболее простому закону векторного управления током по поперечной оси [6,7], рассматривая двигатель в пространстве системы вращающихся координат d, q [8,9]. Обеспечивая линейную зависимость электромагнитного момента от задания, управление током по поперечной оси оказывается достаточно простым. Но такое управление тяговым двигателем не обеспечивает минимальные потери в меди и не позволяет увеличить скорость электровоза при естественном ограничении напряжения источника питания.
Известен закон формирования электромагнитного момента явнополюсным СДПМ по минимуму тока, обеспечивающий минимальные потери в меди двигателя. Несмотря на низкие потери в меди, такой закон управления не лишён определённых недостатков. Рост реактивной мощности при увеличении нагрузки не позволяет эффективно использовать мощность, подводимую к обмоткам двигателя [10,11], ограничивает диапазон регулирования в области больших скоростей, увеличиваются потери в стали.
Формирование электромагнитного момента явнополюсной синхронной машины с постоянными магнитами при минимизации реактивной мощности, в силу увеличения потерь в меди, не нашло своего применения. Вместе с тем, несмотря на увеличение тепловых потерь, закон управления при минимизации реактивной мощности имеет определённые достоинства. Минимизация реактивной мощности при ограничении тока и напряжения позволяет передать большую мощность на движение электровоза, увеличить максимальную скорость двигателя и снизить потери в стали.
Рассмотренные законы управления СДПМ имеют свои достоинства и недостатки. При ограничении тока и напряжения, подводимого к обмоткам двигателя, работающего от автономного источника питания, важной энергетической характеристикой выступает величина максимальной мощности, которую можно передать на движение электровоза. Косвенно эта характеристика определяет расстояние, которое может проехать электровоз на одной зарядке аккумулятора. Поэтому задача выбора закона управления явнополюсной синхронной машиной с постоянными магнитами для реализации в электроприводе рудничного электровоза по энергетическим показателям качества является неоднозначной.
Целью работы ставится сравнение характеристик явнополюсной синхронной машины с постоянными магнитами при управлении током по поперечной оси при минимуме тепловых потерь и при минимизации реактивной мощности двигателя рудничного электровоза в условиях ограничения напряжения и тока.
Постановка задачи
Ставится задача анализа законов управления явнополюсным синхронным двигателем с постоянными магнитами электропривода рудничного электровоза по энергетическим критериям качества.
Математическое описание трёхфазного синхронного двигателя с постоянными магнитами
Решение поставленной задачи рассматривается на примере трёхфазного синхронного двигателя с постоянными магнитами СДПМ, представленного в пространстве [13-15] системы вращающихся координат d, q:

где Ψ, I, U – векторы потокосцепления, тока и напряжения; R, L – матрицы сопротивлений и индуктивностей; Ψ0 – приведённое к обмоткам двигателя значение потока постоянных магнитов; N – матрица-столбец, характеризующая ориентацию системы относительно потока Ψ0 постоянных магнитов; D – матрица поворота; J – приведённый к валу двигателя момент инерции; mс – момент статического сопротивления; ω – скорость вращения ротора; p – число пар полюсов; m – электромагнитный момент; Q – реактивная мощность (3); ΔP – потери в меди; СТ – потери в стали при достаточно точном приближении [16] сводятся к одной простой эмпирической формуле (4), где коэффициент Z характеризует магнитные свойства стали. Векторы тока и напряжения ограничены по модулю областью допустимых значений. Напряжение двигателя формируется узлом векторной ШИМ при оптимальной частоте коммутации силовых ключей [17].
На рис. 1 показана векторная диаграмма СДПМ в системе вращающихся координат d и q. Углы и μ отражают положение вектора потокосцепления Ψ и тока I статора относительно потока постоянных магнитов Ѱ0, угол φ определяет положение вектора ЭДС от потокосцепления статора относительно вектора тока, обозначенного на рис. 1 как Е. При некотором допущении соs(φ) не отличается от стандартной оценки, обусловленной фазовым сдвигом основной гармоники напряжения питающей сети относительно синусоидального тока статора.
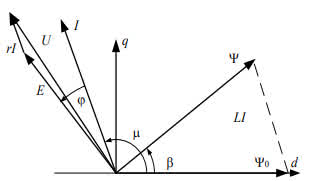
Рис. 1. Векторная диаграмма синхронной машины с постоянными магнитами
Анализ работы синхронной машины с постоянными магнитами в условиях ограничения напряжения источника питания u=umax выполняется для сравнения энергоэффективных законов управления тяговым двигателем. При различных значениях тока i определены предельные значения угловой скорости ω, электромагнитного момента m, тепловых потерь ΔP, потерь в стали СТ, реактивной мощности 𝑄 и мощности mω, передаваемой на движение электровоза.
Реализация управления осуществляется посредством алгоритма, обеспечивающего желаемое изменение проекций вектора тока при формировании электромагнитного момента в соответствии с выбранным законом. Определив положение вектора тока или его проекций id, iq при том или ином законе управления, всегда можно определить значение электромагнитного момента, максимальное значение скорости при ограничении напряжения, тепловые потери, потери в стали и величину реактивной мощности.
Характеристики двигателя при управлении током по поперечной оси
Рассмотрим возможности работы СДПМ при управлении током по поперечной оси на примере трёхфазного явнополюсного синхронного двигателя в условиях ограничения напряжения. Ограничение тока рассматривается на уровне часового режима
При ограничении модуля напряжения umax=41 установленные функции (7) и (9) управления током по поперечной оси представлены в графическом виде на рис. 2. Из рисунка хорошо видно значительное снижение максимальной скорости ω(i) двигателя при увеличении тока, рост реактивной мощности Q(i) и мощности m(i)ω(i), передаваемой на движение электровоза [18].
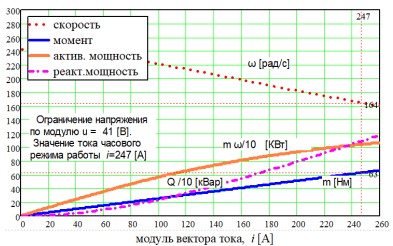
Рис. 2. Зависимость скорости, момента, активной и реактивной мощности от тока при управлении синхронной машиной током по поперечной оси
Характеристики двигателя при работе в условиях минимума тока
Рассмотрим условия работы двигателя электровоза при минимизации тепловых потерь. Тепловые потери можно характеризовать посредством функции энергетического состояния F(μ), определяющей отношение тепловых потерь к электромагнитному моменту [19], в зависимости от модуля вектора тока и его положения, характеризуемого углом μ относительно потока постоянных магнитов. В силу различного магнитного сопротивления потоков продольной и поперечной осей положение вектора тока при минимизации потерь в меди будет изменяться в зависимости от тока. Для определения положения вектора тока μ(i), доставляющего минимум тепловых потерь, минимизируем функцию энергетического состояния F(μ)
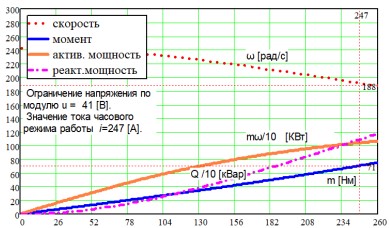
Рис. 3. Зависимость скорости, момента, активной и реактивной мощности от тока при управлении по минимуму тока
Характеристики двигателя при работе в условиях минимума тока
Рассмотрим условия передачи исполнительному механизму явнополюсной синхронной машины с постоянными магнитами максимальной мощности при ограничении тока imax и напряжения umax, подводимого к обмоткам двигателя.
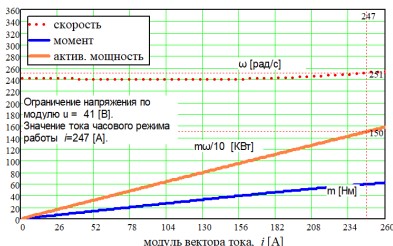
Рис. 4. Зависимость скорости, момента, активной и реактивной мощности от тока при минимизации реактивной мощности
Заключение
В статье рассмотрены энергетические характеристики явнополюсной синхронной машины с постоянными магнитами управления током по поперечной оси, управления при минимизации тепловых потерь и управления при минимизации реактивной мощности. Сравнение функции электромагнитного момента m(i), угловой скорости ω(i), реактивной мощности Q(i) и мощности m(i)ω(i), затрачиваемой на движение электровоза в зависимости от тока, показывает, что управление током по поперечной оси не отличается высокими энергетическими показателями. В часовом режиме работы реактивная мощность превышает величину мощности, затрачиваемой на движение электровоза. Работа двигателя при минимизации потерь в меди даёт лучшие результаты. Электромагнитный момент в часовом режиме работы увеличен на 12,7 %. Максимальная скорость двигателя увеличивается на 13 %. Максимальная мощность, затрачиваемая на движение электровоза, увеличена на 33 %. Реактивная мощность снижается на 29 %.
Хорошие результаты даёт управление при минимизации реактивной мощности. Несмотря на снижение электромагнитно момента на 4,8 % часового режима работы, максимально возможная скорость двигателя увеличена на 53 %, при этом максимальная мощность, затрачиваемая на движение электровоза, увеличена на 50 %. Столь эффективная работа двигателя объясняется наиболее полным использованием мощности, подводимой к его обмоткам. За счёт увеличения скорости, энергетическая эффективность η в часовом режиме работы увеличивается на 1 %. Высокие энергетические показатели обуславливают увеличение пробега электровоза на одной зарядке аккумулятора.
Список использованной литературы
- Wang Y., Liu J.X. Vibration properties of locomotive traction gear excited by load fluctuation // Journal of Traffic and Transportation Engineering. – 2015. – V. 15. – P. 45–50.
- Locomotive wheel slip detection based on multi rate state identification of motor load torque / S. Wang, J. Xiao, J. Huang, H. Sheng // Journal of the Franklin Institute. – 2016. – V. 353. – Iss. 2. – P. 521–540.
- Senseless PMSM Drive Implementation by Introduction of Maximum Efficiency Characteristics in Reference Current Generation / Z. Plantić, T. Marčič, M. Beković, G. Štumberger // Energies. – 2019. – V. 12 (18). – 3502. DOI: 10.3390/en12183502
- Analysis of variants of differential torque control applied to induction motor with short_circuited rotor / A.E. Evstratov, V.M. Zavyalov, A.V. Grigoryev, I.Y. Semykina // ARPN Journal of Engineering and Applied Sciences. – 2016 – V. 11. – № 7. – P. 4391–4398.
- Смирнов А.Ю. Особенности проектирования и анализа высокоскоростных синхронных машин с постоянными магнитами на роторе // Электротехника и энергетика: Известия Нижегородского государственного технического университета им. Р.Е. Алексеевой. – 2013 – № 4 (101). – С. 231–235.
- Blashke F. Das Prinzip der Feldorientierung die Grundlage fur die Transvektor – Regelung von Drehfeldmashinen // Siemens Zeitschift. – 1971. – № 10. – Р. 757–760.
- High performance rectifier/multilevel inverter based BLDC motor drive with PI controller / M.S. Hasan, F.S. Almakhturi, M.D. Albakhait, A.I. Jaber // IOP Conference Series: Materials Science and Engineering. – 2020. DOI: 10.1088/1757- 899X/745/1/012005.
- Filushov Yu.Р., Simakov G.M., Filushov V.Yu. The formation of energy-efficient control of a high-speed AC electric drive // 2016 11th International Forum on Strategic Technology (IFOST). – 2016. – V. 721. – P. 118–120.
- Electrical steels and their evaluation for automobile motors / S. Kunihiro, U. Masanori, Y. Soichiro, O. Yoshihiko // World electric vehicle journal. – 2019. – V. 10 (2). – 31. DOI: 10.3390/wevj10020031
- Уайт Д., Вудсон Г. Электромеханическое преобразование энергии. – М: Энергия, 1964. – 527 с
- Sliding mode control of longitudinal motions for underground mining electric vehicles with parametric uncertainties / W. Ye, W. Shen, J. Zheng, D. Honnery, D. Dayawansa // International Journal of Modelling, Identification and Control. – 2016. – V. 26. – Iss. 1. – P. 68–78.
- PWM strategy for equal distribution of losses between low-voltage cells in an MV frequency converter / Y. Kazemirova, A. Anuchin, A. Kovyazin, M. Lashkevich, D. Aliamkin, S. Grishin // 2020 55th International Universities Power Engineering Conference (UPEC). – Torino, Italy, 2020. – Р. 1–6.
- Enhancement mathematical model of BLAC motor drive using rotation coordinate for better output performance / I.J. Alzubaydy, R.A. Gaib, R.A. Mejeed, A.A. Hajer // Journal of Engineering and Applied Sciences. – 2019. – V. 14. – Р. 837–845.
- Obed A.А., Saleh A.L., Kadhim A.K. Speed performance evaluation of BLDC motor based on dynamic wavelet neural network and PSO 128 algorithm // International Journal of Power Electronics and Drive Systems. – 2019. – V. 10 (4). – Р. 1742–1750.
- Curuvua B., Lihua C., Fan X. Enhanced gate driver with variable turn on and turn off speeds. – 2019. – № 2019-01-0608. – SAE Technical Paper. DOI: https://doi.org/10.4271/2019-01-0608.
- Filushov Yu. P., Filushov V.Yu. Control of a synchronous machine while minimizing heat losses under conditions of minimum reactive power // Russian electrical engineering. – 2013. – V. 84. – № 12. – P. 712–717.
- Number of poles pairs effects on electromagnetic torque permanent magnet synchronous motor / A. Usoltsev, G.L. Demidova, D.V. Lukichev, S. Bratchikov // 2019 IEEE 60th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON). – Riga, 2019. – Р. 1–5.
- Filushov Yu.Р., Simakov G.M., Filyshov V.Yu. Energy-efficient control of synchronous machine // 2014 12th International conference on actual problems of electronic instrument engineering proceedings. – 2014. – V. 7. – Р. 837–842.