Введение
На отечественных шахтных аккумуляторных электровозах широкое распространение получил привод с двумя тяговыми электродвигателями последовательного возбуждения с безреостатной системой управления скоростью движения путем секционирования аккумуляторной батареи в сочетании с последовательно-параллельным соединением двигателей и ослаблением магнитного поля. По сравнению с ранее применявшимся приводом с реостатной системой управления он имеет лучшие энергетические показатели благодаря устранению потерь энергии в пусковых реостатах, но малое количество ступеней регулирования скорости и как следствие – значительные броски тока и тягового усилия при переходе с одной позиции контроллера на другую приводят к существенному недоиспользованию сцепной массы локомотива, а также к снижению надежности и ресурса его работы [1, 2].
Указанные недостатки в значительной степени устраняются при переходе к импульсным системам регулирования скорости, которые в результате комплекса научных исследований и разработок были реализованным на базе однооперационных тиристоров [2-4]. К сожалению, по ряду причин они не получили широкого практического применения [2-3].
Более перспективны системы импульсного регулирования на базе полностью управляемых полупроводниковых ключевых элементов, позволяющие повысить надежность работы привода и за счет более высокой частоты коммутации снизить пульсации тока в цепях тяговых электродвигателей [2-3].
Особенностью синхронных машин с высококоэрцитивными магнитами является значительная магнитная проводимость поперечного потока по сравнению с проводимостью продольного потока при совпадении осей полюсов ротора и фазных обмоток статора [5]. Несмотря на простую конструкцию явнополюсной синхронной машины, различная магнитная проводимость продольной и поперечной оси затрудняет решение задачи управления. Транзисторная система широтно-импульсной модуляции обеспечивает формирование необходимого напряжения для реализации требуемых законов, исключая аварийные ситуации и перегрев тягового электродвигателя локомотива. Использование микропроцессорной техники позволяет без усложнения конструкции применять сложные законы управления электроприводом, обеспечивающего экономичное движение электровоза.
Однако сохранение в качестве тяговых – двигателей последовательного возбуждения с необходимостью переключений в силовых цепях при реверсе снижает надежность привода и создает дополнительные трудности перехода на автоматическое управление движением шахтных поездов. Кроме того, электровоз, оборудованный двигателями последовательного возбуждения с мягкой механической характеристикой, более склонен к буксованию при повышенных нагрузках, а в зоне малых и отрицательных нагрузок развивает недопустимо большую скорость движения, что снижает безопасность работы и усложняет процесс управления электровозом [1], [5].
С этой точки зрения более предпочтительны тяговые двигатели с независимыми обмотками возбуждения, имеющие жесткие естественные механические характеристики. Однако на шахтных электровозах они не нашли применения по двум основным причинам:
- большие токовые перегрузки при повышенных сопротивлениях движению;
- возможность существенно неравномерного распределения тока между якорными цепями двигателей при их параллельном соединении.
В настоящее время, с использованием достижений силовой электроники и микропроцессорных средств управления, эти недостатки могут быть достаточно эффективно устранены разработкой систем автоматического индивидуального регулирования токов возбуждения тяговых электродвигателей с независимыми обмотками возбуждения в функции токов их якорных цепей.
Кроме того, при реверсировании двигателей переключениями в маломощных и слаботочных цепях независимых обмоток возбуждения возможна практически полностью бесконтактная реализация тягового электропривода. Принципиальная электрическая схема одного из разработанных авторами вариантов такого привода приведена на рис. 1
Особенностью схемы является то, что обмотки возбуждения LM1 и LM2 двигателей включены в две фазы трехфазного мостовго инвертора на твердотельном модуле из шести транзисторов VT1–VT6, зашунтированных встречными диодами VD1–VD6. При этом одноименные выводы обмоток возбуждения, например, их начала соединены в общую точку A
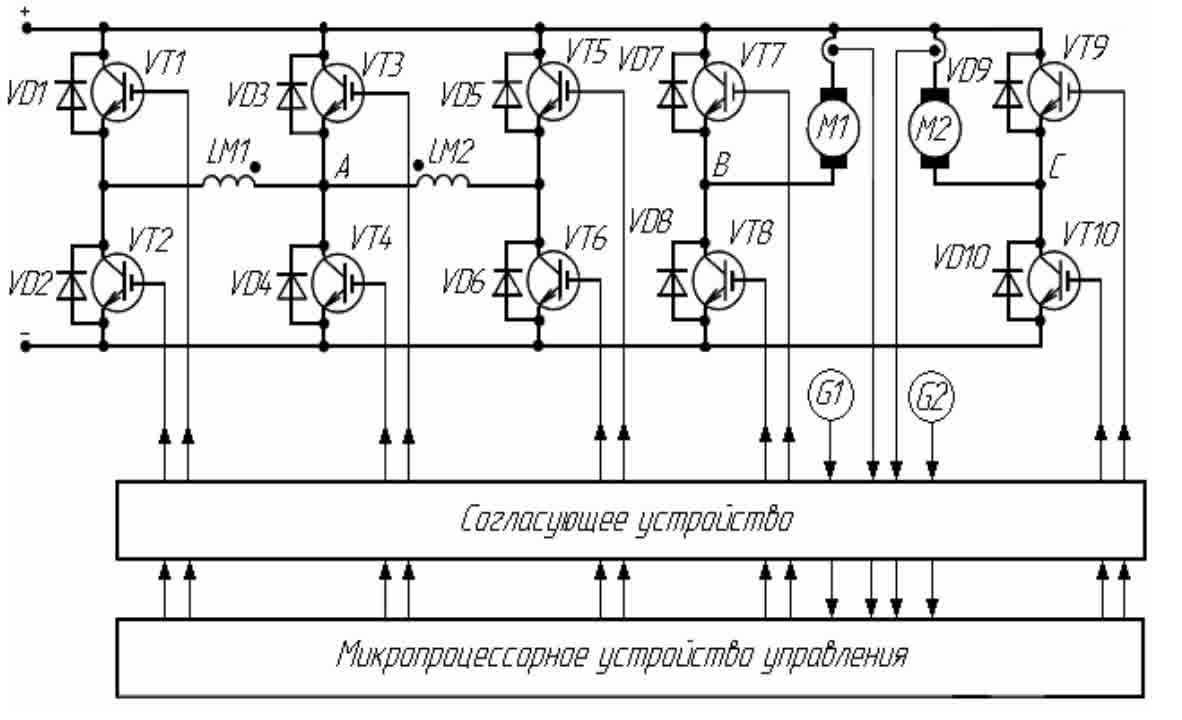
Рис. 1. Принципиальная электрическая схема варианта тягового электропривода на базе тяговых двигателей с обмотками независимого возбуждения
При движении электровоза “Вперед” постоянно открыт транзистор VT3, а посредством транзисторов VT2, VT6 в совокупности с диодами VD1 и VD5 осуществляется индивидуальное импульсное регулирование токов возбуждения тяговых двигателей в функции токов их якорных цепей. При движении в противоположном направлении аналогично используются транзисторы VT4, VT1, VT5 и диоды VD1, VD5. диоды VD1, VD5.
Якорные цепи электродвигателей М1 и М2 реализованы с использованием силового IGBT-модуля на транзисторах VT7–VT10 и диодах VD7–VD10, подобно тому, как это выполнено в трамваях KT4SU [6]. При такой конфигурации силовой части схемы транзисторами VT8, VT10 совместно с диодами VD7, VD9 обеспечивается импульсное регулирование скорости в двигательном режиме, а транзисторами VT7, VT9 совместно с диодами VD8, VD10 – импульсное рекуперативное торможение с отдачей энергии в тяговую батарею при остановках или снижении скорости движения.
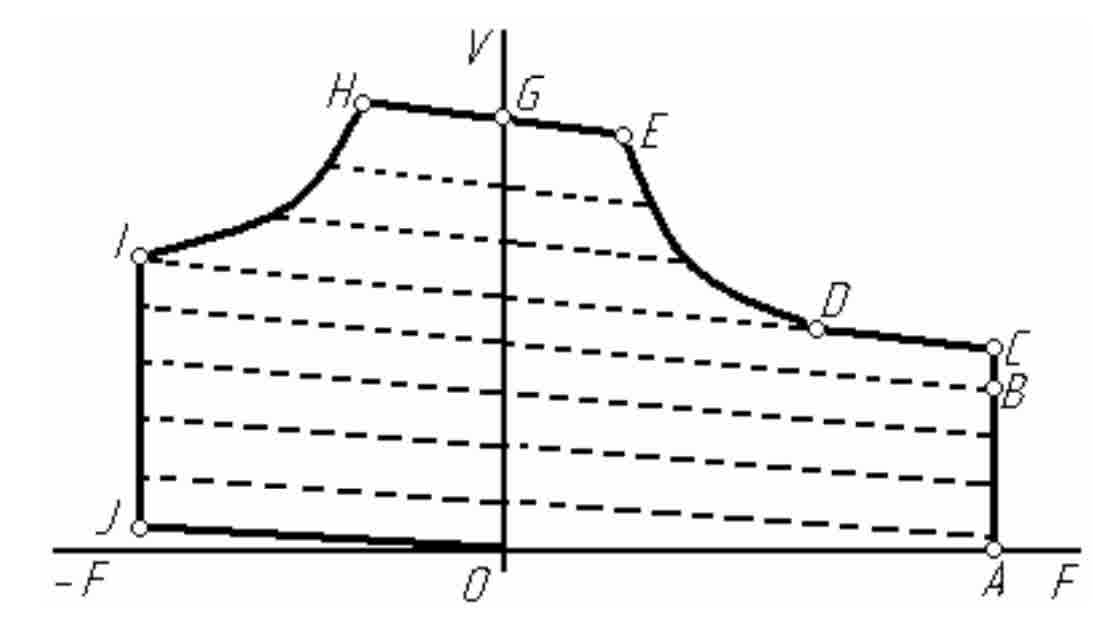
Рис. 2. Рациональная форма тяговых характеристик привода
Возможен вариант выполнения силовой схемы привода с использованием двухтранзисторного IGBT-модуля (VT7, VD7, VT8, VD8) при параллельном соединении якорных обмоток электродвигателей (при установке перемычки между точками B и C).
Для снижения пульсаций потребляемого электроприводом тока в цепь питания при необходимости может быть введен сглаживающий L-C фильтр
Сигналы на включение и выключение ключевых элементов поступают от микропроцессорного устройства управления, на вход которого поступает информация от датчиков тока якорных цепей и датчиков G1, G2 частоты вращения электродвигателей. При этом введением искусственной задержки в программу управления либо использованием инерционности обмоток возбуждения необходимо блокировать работу системы выравнивания якорных токов при кратковременных нарушениях их равенства, вызванных процессами пробуксовок при нарушении сцепления колес с рельсами
Предложенный электропривод позволяет получить практически любые требуемые тяговые характеристики, например, аналогичные приведенным на рис. 2. [7].
Сплошной линией ABCDEGHIJ0 на рисунке изображена предельная зависимость скорости движения V от тягового (тормозного) усилия F, а пунктирными линиями – участки промежуточных характеристик для фиксированных средних значений напряжений на зажимах якорных обмоток и обмоток возбуждения. Отрезок ABС соответствуют разгону электровоза с постоянным средним значением тягового усилия, предельно допустимым по условию сцепления колес с рельсами при номинальном (или форсированном на участке BC) возбуждении тяговых двигателей. Линия CDI – это естественная характеристика при номинальном возбуждении и полном напряжении питания якорных цепей. Гиперболический участок DE соответствует постоянству мощности (стабилизации тока), участок EG – ограничению скорости движения в тяговом режиме, GHIJ0 – ограничению области тормозных режимов.
Промежуточные характеристики, расположенные ниже линии CDI, реализуются импульсным регулированием напряжения питания якорных цепей электродвигателей при номинальном возбуждении, а расположенные выше – ослаблением поля при полном напряжении на зажимах якорных обмоток.
Работа привода в зоне повышенных нагрузок на жестких характеристиках с автоматическим ограничением максимальной величины тягового усилия повышает противобуксовочные свойства электровоза и позволяет реализовать более высокие значения коэффициента сцепления, что подтверждено многочисленными теоретическими и экспериментальными исследованиями [5].
Аналогичный вариант тягового привода можно получить при питании обмоток возбуждения двигателей последовательного возбуждения от управляемых DC/DC преобразователей, что позволяет с минимальными затратами оснастить им аккумуляторные электровозы, находящиеся в эксплуатации на предприятиях угольной промышленности
Работоспособность предложенного варианта привода предварительно проверена компьютерным моделированием в среде Matlab [7]. Разрабатывается экспериментальный стенд для исследования режимов работы привода на физической модели.
Список использованной литературы
- Беловидов, Б.С. Анализ различных типов приводов для рудничных автоматизированных электровозов / Б. С. Беловидов [и др.]. // Исследование работы и автоматизация горных машин: тр. Новочеркасского политехнического института. – Новочеркасск: 1964. – Т. 159. – С. 31–38.
- Довженко В.П. Транзисторные модули для управления приводом рудничных электровозов / В. П. Довженко [и др.]. //Уголь Украины. – 2003. – № 10.– С. 16–18.
- Евстафенко П.Ф. Перспективы развития электрооборудования для рудничного электровозного транспорта / П.Ф. Евстафенко [и др.]. //Уголь Украины. –2003. –№ 10. – С. 22–23.
- Системы управления рудничным электровозным транспортом / О. Н. Синчук [и др.]. – М.: Недра, 1993
- Фаминский Г.В. Эффективность использования локомотивов с жесткими тяговыми характеристиками / Г. В. Фаминский // Вестник ВНИИЖТ. –1996. – № 6. – С. 26–29.
- Лаугис Ю. Состояние и тенденции развития электротранспорта Эстонии / Ю. Лаугис [и др.]. // Тр. III Международной (XIV Всероссийской) науч.-тех. конф. по автоматизированному электроприводу “АЭП–2001” (Нижний Новгород 12–14 сентября 2001). – Нижний Новгород: Изд-во Вектор-Тис. –2001. – С. 243– 245.
- Семенчук А.С. Моделирование тягового привода на базе двигателей независимого возбуждения с регулированием магнитного потока в функции тока якоря / А. С. Семенчук, Ю. П. Сташинов // Перспективы развития Восточного Донбасса. Часть 2: cб. науч. тр. / Шахтинский ин-т (филиал) ЮРГТУ (НПИ). – Новочеркасск: УПЦ “Набла” ЮРГТУ (НПИ). –2007. – С. 200–206.