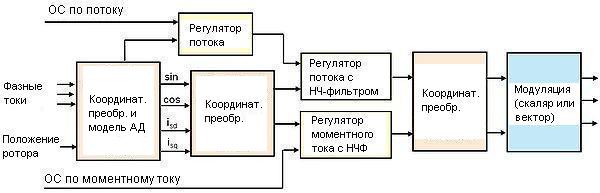
Рисунок 1 – Система векторного управления.
Векторное управление (также называемые поле ориентированным управлением, ПОУ) является одним из методов, используемых в частотно управляемых приводах для управления моментом (и, таким образом, скоростью) трехфазных электродвигателей переменного тока, контролируя ток подаваемый на машины.
Фазные токи статора измеряются и преобразуются в соответствующий комплекс (пространственный) вектор. Этот вектор тока затем преобразуется в систему координат, вращающуюся с ротором машины. Для этого должно быть известно положение ротора. Так, при измерении скорости, положение ротора может быть получено путем интегрирования скорости.
Затем вектор потокосцепления ротора оценивается путем умножения тока статора на вектор индуктивности намагничивания Lm и фильтрации результата на низких скоростях с постоянная времени ненагруженного ротора LR / Rr, то есть соотношение роторной индуктивности и роторного сопротивления.
Используя этот вектор потокосцепления ротора, вектор тока статора впоследствии преобразуется в системе координат, где реальная ось х совпадает с вектором потокосцепления ротора.
Теперь действительная составляющая вектора тока статора в этой ориентированной по потоку ротора системе координат, может быть использована для контроля потокосцепления ротора, а мнимая (у) составляющая может быть использована для управления моментом двигателя.
Обычно ПI-регуляторы используются для поддержания этих токов на эталонных значениях. Однако, релейное регулирование токов, дающее лучшую динамику, также возможно.
С ПI-регуляторов, выходы регуляторов х-у составляющих вектора опорного напряжения статора. Обычно из-за перекрестной связи между х и у осями вводят развязку, усиливая выход регулятора улучшая контроль за исполнением, когда присутствуют большие и быстрые изменения скорости, тока и потокосцепления.
Обычно PI-регулятор также нуждается в низкочастотной фильтрации на входе или выходе, для
предотвращения текущего дрейфа из-за переключения транзистора от чрезмерного усиления и дестабилизации
контроля. К сожалению, фильтрация ограничивает динамику системы управления. Таким образом довольно высокой частоте переключения (как правило, более 10 кГц) необходимо допустить только минимальный фильтр для высокой быстродействия как в сервоприводах.
Далее сигналы напряжения сначала преобразуются в неподвижной системе координат (обычно через ротор-ориентированные координаты d-q), а затем подается в модулятор, что, используя один из многих алгоритмов широтно-импульсной модуляции (ШИМ) определяет необходимые ширины импульса напряжения фазы статора и управления транзисторами (как правило, IGBT) инвертора в соответствии с этим.
Этот метод контроля предполагает следующие свойства управления: