|
Шатохин Александр Леонидович
Горно-геологический факультет
(ГГФ)
Специальность:
"Геоинформационные системы и технологии"
E-mail: Leo@ukrtop.com
Тема магистерской работы: “Исследование методов калибровки цифровой камеры” Руководитель: доцент, к.т.н. Шоломицкий Андрей Аркадьевич
|
||||||||||||
| Моя биография Библиотека Ссылки | ||||||||||||
|
Введение
Как правило, любые процессы в исследуемом объекте мы пытаемся описать математическими зависимостями (формулами). Совокупность этих формул представляет собой математическую модель объекта, которая с той или иной степенью точности описывает зависимости между параметрами объекта. Наука, которая занимается изучением способов определения размеров, форм и пространственного положения объектов по их изображениям называется фотограмметрией. Вся математика фотограмметрии основана на предположении, что измеряемый снимок – есть центральная проекция объекта на плоскости. Центральная проекция – это и есть та идеализированная математическая модель, описывающая зависимость между изображением в натуре и на снимке. Но в реальной жизни не все так просто и хорошо, как в теории. Реальный снимок будет представлять собой центральную проекцию только в том случае, если в момент фотографирования соблюдаются следующие условия: 1. Поверхность светочувствительного слоя представляет собой плоскость 2. Элементы внутреннего ориентирования камеры известны и сохраняются от снимка к снимку 3. Объектив камеры дает ортоскопическое изображение объекта Проверка выполнения перечисленных условий составляет задачу исследования съемочной камеры, а измерение отклонений от центральной проекции составляет ее калибровку [1, 63с]. В настоящее время для решения прикладных задач фотограмметрии все шире внедряются относительно недорогие и потому доступные цифровые камеры. Применение цифровых камер позволяет избежать фотолабораторный процесс, получить цветное изображение, которое к тому же непосредственно загружается в компьютер. Конечно, такие камеры по точности результатов не в состоянии конкурировать со специальной аппаратурой, но имеется большой круг задач, где они могут успешно применяться. Целью данной работы как раз и является исследование возможных путей калибровки цифровых камер.
Известные методы калибровки можно разделить на 2 основные группы. Первая группа способов характеризуется тем, что испытанию подвергают съемочную аппаратуру (калибровка камер). Результаты калибровки вместе с расчетами по данным стандартной атмосферы или отнаблюденными ее параметрами используют для вычисления систематических ошибок снимков. Это направление включает лабораторную калибровку применяемой аппаратуры (фотоаппарата, светофильтров и т.д.), фиксирование во время фотосъемки с помощью дополнительных приборов условий среды (температуры воздуха внутри и вне носителя, температуры различных частей фотоаппарата, давление воздуха и т.д.), определение с помощью расчетов поправок к результатам лабораторных испытаний аппаратуры и, наконец, поправок  к фокусному расстоянию и к фокусному расстоянию и
 в координаты точек снимков.
Таким образом, главное содержание этого направления – “наблюдать среду и
вносить поправки” [2, 33с]. Кроме несомненных достоинств это направление
имеет и некоторые недостатки, состоящие в следующем: в координаты точек снимков.
Таким образом, главное содержание этого направления – “наблюдать среду и
вносить поправки” [2, 33с]. Кроме несомненных достоинств это направление
имеет и некоторые недостатки, состоящие в следующем:- необходимо создавать соответствующую дополнительную аппаратуру; - созданная вспомогательная аппаратура сама должна подвергаться калибровке с учетом условий ее эксплуатации; - фиксация с достаточной точностью некоторых источников систематических ошибок пока технически не разработана; - не все источники систематических ошибок изучены до уровня, позволяющего производить их количественную оценку. Вторая группа содержит способы, в которых систематические ошибки определяют по фотоснимкам, полученным в тех же условиях, в которых выполнена производственная фотосъемка или близких к ним. Это направление дает возможность наиболее просто и полно определить и учесть суммарное влияние всех источников ошибок снимков, не зная каждой из составляющих, законов их образования и не имея специальных данных для их определения. Поэтому оно является наиболее перспективным [2, 34с]. Поскольку объектом определения систематических ошибок является снимок, появляется такое понятие как калибровка снимков. Под калибровкой снимков понимается определение совокупности величин, характеризующих центральную проекцию снимков, соответствующую условиям съемки, и уклонение точек фотоизображения от этой проекции. Эти величины, содержащие только систематические части ошибок снимков, называют параметрами калибровки, которые характеризуют качество снимков на период их фотограмметрической обработки. К ним отнесены поправки  к элементам внутреннего ориентирования снимков и поправки
к координатам каждой точки снимка
за суммарное влияние всех источников систематических искажений центральной
проекции, независимо от их происхождения [2, 34с].
к элементам внутреннего ориентирования снимков и поправки
к координатам каждой точки снимка
за суммарное влияние всех источников систематических искажений центральной
проекции, независимо от их происхождения [2, 34с]. Описанные выше методы калибровки камер довольно хорошо изучены и описаны в литературе [1-4]. Но, в основном, применительно к пленочным фотокамерам. Чтоб использовать неметрические цифровые камеры для решения производственных задач, необходимо знать и уметь учитывать систематические искажения, вносимые конкретной камерой. Проблема учета этих искажений заключается в том, что обычные бытовые камеры имеют ряд недостатков, которые отсутствуют у специальной фотограмметрической аппаратуры: элементы внутреннего ориентирования не постоянны, большая дисторсия и ряд других. Кроме того, ввиду совершенно новой технологии получения снимков (использование ПЗС) встает задача отыскания наиболее простого и эффективного метода, позволяющего определять и учитывать искажения, вносимые именно цифровыми камерами, т.е. с учетом их особенностей. Вопросы, касающиеся калибровки цифровых камер, теории учета систематических искажений неметрических снимков в своих работах рассматривали Р.Н. Гельман [5-8], В.И. Юрченко [9-11] и др. [12]. Однако, ввиду новизны данной проблемы теория калибровки цифровых камер и обработки цифровых изображений находится в стадии бурного развития, поэтому здесь широкий простор для исследователя. Одним из перспективных методов калибровки снимков, а главное, доступным в наших условиях является метод, основанный на определении характеристик центральной проекции снимков и ее искажения по фотографиям специального полигона, на котором определены пространственные координаты X,Y,Z большого числа точек [2, 88с]. Вся работа в этом случае распадается на ряд самостоятельных этапов: 1. Создание калибровочного стенда. 2. Измерение стенда и обработка полученных измерений (уравнивание геодезической сети трилатерации). 3. Фотосъемка стенда и обработка полученных стереопар. 4. Определение параметров калибровки. 5. Анализ полученных результатов.
Способ калибровки снимков по фотографиям испытательного
полигона, представляющего собой объектное пространство, основан на решении
обратной пространственной засечки.
которое определяет функциональные связи между измеренными (t),
определяемыми (
Приведя систему уравнений (2.2) к линейному виду и решив
ее – найдем значения неизвестных
Калибровочный стенд представляет собой совокупность большого числа контрольных точек с определенными пространственными координатами Xг,Yг,Zг в некоторой системе координат. Стенд был разбит на стене одного из учебных кабинетов (см. Рис.1). Общая площадь полигона порядка 3200х4800мм.
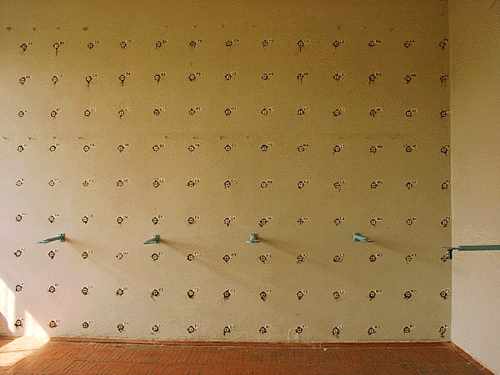
После изготовления стенда было произведено его
измерение: измерены длины между всеми точками (всего 104 точки),
определены отметки каждой точки относительно некоторой условной
плоскости. При измерении длин отсчеты брались с точностью до 0.2мм
(использовалась Женевская линейка). Имея отметку каждой точки для всех
измеренных длин, было вычислено горизонтальное проложение. В результате
получена сеть трилатерации.
За период лето 2001г. – весна 2003г. было произведено шесть серий фотосъемок стенда: первые четыре серии отсняты камерой Casio QV-2000UX/iR, остальные камерой – Canon Digital IXUS v2. В общей сложности измерено 20 стереопар (12 для Casio, 8 для Canon). Все измерения стереопар производились с помощью программного обеспечения цифровой фотограмметрической станции Digitals/Delta ver5.0 фирмы GeoSystem (Винница). В результате этих измерений были получены каталоги координат контрольных точек стенда в некоторой условной системе координат снимка.
Для решения задачи калибровки камеры (см. формулы 2.1-2.2) необходимо иметь опорные данные (координаты точек стенда, Xг,Yг,Zг), измеренные величины (координаты этих же точек в системе координат снимка), а также знать вид функциональных зависимостей, связывающих измеренные величины с опорными (уравнения коллинеарности) [2, 37с]. Для отыскания параметров калибровки камеры была использована программа BlockMSG, разрабатываемая заведующим кафедрой Геоинформатики и геодезии, профессором С.Г. Могильным. Данный программный комплекс позволяет стереопары, измеренные на стереокомпараторе либо на цифровой станции Digitals/Delta, объединить в общую фотограмметрическую сеть и выполнить ее уравнивание строгим способом методом связок. В настоящее время программа содержит блок, позволяющий выполнять калибровку фотокамер. Алгоритм определения искажений, вносимых исследуемой камерой, основан на отыскании коэффициентов полиномов третьей степени, которыми апроксимируются систематические ошибки по полю снимка. В программе используются полиномы следующего вида:
Таким образом, с помощью программы BlockMSG были
найдены коэффициенты полиномов ошибок, а также определено фокусное расстояние
исследуемых камер в пикселах (фокусное расстояние для камеры Casio составило
1680 пкс, для Canon – 1600 пкс).
Зная фокусное расстояние камеры и коэффициенты полинома ошибок, можно найти поправки в координаты точек, полученных в результате измерения снимков. Построенная по исправленным координатам модель должна более точно соответствовать центральной проекции. Чтобы проверить это утверждение (а вернее, правильность рассчитанных параметров калибровки), были проведены следующие работы: 1. По неисправленным координатам контрольных точек снимка с помощью BlockMSG рассчитаны координаты этих же точек в системе калибровочного стенда. Полученные координаты сравнены с опорными:
2. Аналогичные действия проведены и в случае
с исправленными координатами.
В результате проведенных работ была показана возможность калибровки неметрической цифровой камеры по снимкам плоского калибровочного стенда, приведены результаты исследований, показывающие на конкретных цифрах результаты обработки снимков с учетом найденных параметров калибровки и без них. В дальнейшем планируется систематизировать накопленный за все время проведения данной работы материал и произвести окончательный анализ полученных результатов. Кроме того, в отдельное направление для исследований может перерасти вопрос о наиболее эффективном алгоритме трансформирования снимков (цифрового изображения) с учетом параметров калибровки.
1. Могильный С.Г., Беликов И.Л., Ахонина Л.И., Брежнев Д.В., Бордюков М.П. Фотограмметрия. – Киев; Донецк: Вища шк. Головное изд-во, 1985. – 278с. 2. Дубиновский В.Б. Калибровка снимков. – М.: Недра, 1982. – 224с. 3. Бобир Н.Я., Лобанов А.Н., Федорук Г.Д. Фотограмметрия. – М.: Недра, 1974. – 472с. 4. Лобанов А.Н., Дубиновский В.Б., Машимов М.М., Овсянников Р.П. Аналитическая пространственная фототриангуляция. – М: Недра, 1991. – 255с. 5. Гельман Р.Н., Дунц А.Л. Лабораторная калибровка цифровых камер с большой дисторсией // Геодезия и картография. – 2002. - №7. – С. 23 – 31.6. Гельман Р.Н., Никитин А.Л., Дунц А.Л. Опыт использования и калибровки цифровых камер при совместной аэрофотосъемке с АФА // Геодезия и картография. – 2001. - №6. – С. 25 – 31. 7. Гельман Р.Н., Никитин М.Ю., Никитин А.Л. Об учете дисторсии при обработке видеоизображений // Геодезия и картография. – 2000. - №11. – С. 19 – 23. 8. Гельман Р.Н. Возможности использования обычных цифровых камер для наземной стереосъемки // Геодезия и картография. – 2000. - №4. – С. 31 – 41. 9. Юрченко В.И. Исследование моделей учета систематических искажений неметричсеких снимков с самокалибровкой // Геодезия и картография. – 2002. - №8. – С. 32 – 37. 10. Юрченко В.И. Об учете систематических искажений неметрических снимков // Геодезия и картография. – 2002. - №7. – С. 31 – 38. 11. Юрченко В.И. Усовершенствование способа аналитический обработки неметрических снимков // Геодезия и картография. – 2001. - №1. – С. 33 – 36. 12. Симинеев А.А., Власова Л.Д. Определение элементов ориентирования снимка из условия коллинеарности векторов в неявном виде // Геодезия и картография. – 2000. - №12. – С. 24 – 27.
|
 ,
, ) величинами и
опорными данными (A). К определяемым величинам относятся координаты
точек местности, элементы внешнего и взаимного ориентирования; к опорным
данным – координаты точек, длины линий и другие характеристики элементов
объектного пространства.
) величинами и
опорными данными (A). К определяемым величинам относятся координаты
точек местности, элементы внешнего и взаимного ориентирования; к опорным
данным – координаты точек, длины линий и другие характеристики элементов
объектного пространства. - параметры калибровки). Тогда, с
учетом двух групп неизвестных -
- параметры калибровки). Тогда, с
учетом двух групп неизвестных -  уравнение (2.1) примет вид:
уравнение (2.1) примет вид:
 ,
измеренные в пространстве объектов.
,
измеренные в пространстве объектов.