

9. Модальное управление непрерывной следящей системой с астатизмом первого порядка
9.1 Синтез модального регулятора непрерывной следящей системы с астатическим объектом на основе преобразования к КФУ
Пусть объект управления определен уравнениями
 (9.1)
(9.1) (9.2)
(9.2)
 – n-мерный вектор состояния объекта;
– n-мерный вектор состояния объекта;
u – управляющее воздействие (скаляр);
у – выходная координата (скаляр);
А – постоянная матрица коэффициентов объекта размерности (n×n);
В - постоянная матрица управления размерности (n×1);
С – постоянная матрица выхода размерности (1×n).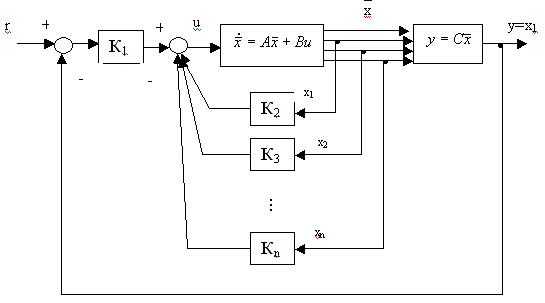
 (9.3)
(9.3)
где (9.4)
(9.4)
 (9.5)
(9.5)
Следует заметить, что в установившемся состоянии мы имеем
 (9.6)
(9.6)
 (9.7)
(9.7)
 (9.8)
(9.8)
 (9.9)
(9.9)
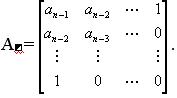
Таким образом, синтез следящей системы, как это видно из выражения (9.9) сводится к синтезу асимптотически устойчивой системы регулирования, такой, что ошибка е(t) стремится к нулю, независимо от начальных условий. Если система, определяемая уравнением (9.1) – вполне управляема, то, точно определяя желаемые собственные значения для матрицы
для матрицы
 , можем определить матрицу методом
модального управления, т.е. методом желаемого (произвольного) размещения полюсов
замкнутой следящей системы, описанным в разделе 8.
, можем определить матрицу методом
модального управления, т.е. методом желаемого (произвольного) размещения полюсов
замкнутой следящей системы, описанным в разделе 8.
Установившиеся значения х(t) и u(t) могут быть найдены следующим образом. В установившемся состоянии, т.е. при (t=∞) из уравнения (9.5) имеем (9.10)
(9.10)
 (9.11)
(9.11)
(9.12)
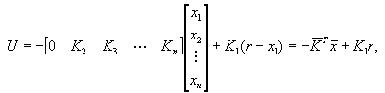
Далее запишем выражение для алгоритма модального управления непрерывной следящей системой
 (9.13)
(9.13) (9.14)
(9.14) (9.15)
(9.15) (9.16)
(9.16) (9.17)
(9.17)
(9.1) (9.2) – n-мерный вектор состояния объекта; u – управляющее воздействие (скаляр);
у – выходная координата (скаляр);
А – постоянная матрица коэффициентов объекта размерности (n×n);
В - постоянная матрица управления размерности (n×1);
С – постоянная матрица выхода размерности (1×n).
Таким образом мы имеем одномерный объект управления, т.к. и управление U, и выходная координата у – скаляры. При имеющемся множестве переменных состояния возможно принять в качестве выходной величины одну из переменных состояния, например, х1, т.е. у=х1. На рис.9.1 представлена общая конфигурация следящей системы с астатизмом первого порядка. Далее, мы принимаем, что входным сигналом или задающим воздействием является ступенчатая функция.
Рисунок 9.1 - Структурная схема следящей системы
В данной следящей системе мы используем схему управления с обратной связью по состоянию:
(9.3)где
(9.4) (9.5)Следует заметить, что в установившемся состоянии мы имеем
(9.6) (9.7) (9.8) (9.9)Таким образом, синтез следящей системы, как это видно из выражения (9.9) сводится к синтезу асимптотически устойчивой системы регулирования, такой, что ошибка е(t) стремится к нулю, независимо от начальных условий. Если система, определяемая уравнением (9.1) – вполне управляема, то, точно определяя желаемые собственные значения
для матрицы
, можем определить матрицу методом
модального управления, т.е. методом желаемого (произвольного) размещения полюсов
замкнутой следящей системы, описанным в разделе 8. Установившиеся значения х(t) и u(t) могут быть найдены следующим образом. В установившемся состоянии, т.е. при (t=∞) из уравнения (9.5) имеем
(9.10)
располагаются все в левой половине S-плоскости, существует
обратная матрица для матрицы .
Следовательно, х(∞) может быть определен как (9.11) (9.12) (9.13) (9.14) (9.15) (9.16) (9.17)9.2 Синтез модального регулятора непрерывной системы с астатическим объектом на основе метода Аккермана
Рассмотрим тот же объект управления, что и в (9.1) и (9.2).
(9.18)
(9.19)
Алгоритм управления для рассматриваемой следящей системы можно
представить в следующем виде:
 (9.20)
(9.20) (9.21)
Обратную матрицу управляемости представим так
 (9.22)
(9.22)
 (9.23)
(9.23)
 (9.24)
(9.24)
(9.18) (9.19) (9.20) (9.21) (9.22) (9.23) (9.24)