Ссылки
Отчет о поиске
Автореферат
Библиотека
О Мальте
Кафедра
Факультет
ДонНТУ
Автореферат магистерской работы.
Тема: "Векторные системы управления с наблюдателями состояния"
Исторически сложилось так, что постоянный ток являлся наиболее распространенным и применимым для электродвигателей в сфере производства вплоть до конца ХХ века. Это было обусловлено в первую очередь высоким КПД, жесткой механической характеристикой и широким диапазоном регулирования частоты вращения. Машины, работавшие на переменном токе, традиционно проигрывали по этим показателям и применялись лишь на малоответственных и не требовавших высокой точности регулирования установках.
Но с недавнего времени наука далеко шагнула вперед в плане полупроводниковых элементов и микропроцессорных устройств, в связи с чем появилась огромная база для совершенствования систем управления приводами переменного тока. Появилась возможность создавать регулируемые электропривода, основанные на других законах управления.
Одним из самых перспективных принципов является векторное управление. Он был сформулирован в начале 70-х годов ХХ века в работах Ф.Блашке. Идея состоит в том, что система векторного управления ориентируется по вектору потокосцепления ротора. При этом момент двигателя ориентируется по поперечной составляющей вектора тока статора, а магнитный поток представляет собой продольную составляющую. Это позволяет организовать управление двигателя аналогичным двигателю постоянного тока, а также получить аналогичные динамические характеристики при частотном управлении.
На анимации для простоты показаны изменения проекций вектора потокосцепления ротора на системы координат статора.
Системы векторного управления АД имеют высокую стабильность и малочувствительны к внешним факторам. Это обуславливает их широкое применение в промышленности, где они максимально реализуют свои потребительские свойства. Легко реализовываются различные законы оптимального управления.
Для создания высокоточной и быстродействующей системы, как правило, используется принцип подчиненного регулирования по нескольким координатам (величинам) двигателя. В данной системе это может быть ток статора, скорость вращения ротора и потокосцепление. Последнюю величину вполне можно оценить косвенно через значения токов, напряжений и частоты вращения.
Целью же моей работы является разработка системы векторного управления без физической обратной связи по скорости, что позволяет исключить тахогенератор и, соответственно, повысить надежность электропривода.
Научная новизна работы заключается в разработке нового метода управления асинхронного двигателя без применения датчика скорости на основе наблюдателя состояния. Предложены различные варианты улучшения качества оценивания сигнала, которые могут применяться в подобных системах управления.
В результате проведенной работы планируется создать автоматическую систему векторного управления АД без датчика скорости, астатическую по нагрузке. При этом ее динамические характеристики не будут уступать аналогичным системам с датчиком и ПИ-регулятором скорости.
Обзор существующих исследований и разработок:
I. Магистерская работа Бондаренко Е.А. : "Разработка системы векторного управления асинхронным электроприводом с наблюдателями состояния". Предлагается построение системы с применением регулятора динамического момента. "В ходе выполнения работы была исследована система векторного управления асинхронного двигателя с наблюдателями состояния, которая разрешает обеспечить астатизм системы по нагрузке без уменьшения ее быстродействия. Основные результаты роботы следующие:
1. Разработанная математическая модель асинхронного двигателя с короткозамкнутым ротором в ортогональной системе координат, ориентированной по вектору потокосцепления ротора, которая использована при исследовании статических и динамических характеристик двигателя, а также при проектировании системы векторного управления.
2. Обоснованная целесообразность регулирования динамического момента с целью повышение астатизма по нагрузке, и синтезированные регуляторы соответствующей системы векторного управления с поддержанием постоянности потокосцепления ротора. Синтезирован канал регулирования потокосцепления (регулятор продольной составляющей тока статора и регулятор потокосцепления ротора) и канал регулирования скорости (регулятор динамического момента и регулятор скорости).
3. Синтезированы разные варианты наблюдателей состояния полного порядка (по отношению к объекту наблюдения), что разрешают восстановить сигнал динамического момента: первого и второго порядка, а также два варианта наблюдателей третьего порядка (на основе полной модели объекта регулирования канала скорости и на основе свернутой модели контура регулирования динамичного момента). Установлено, что со стороны простоты технической реализации более эффективными является первый и последний из перечисленных наблюдателей состояния, которые были синтезированы.
4. Оценены статические и динамические характеристики системы векторного управления с наблюдателями состояния, а также влияние последних на эти характеристики. Установлено, что отличие динамических свойств (динамическая ошибка и наличие колебательности), которая, тем не менее, является очень незначительной даже в переходных режимах работы, возрастает вместе с повышением порядка наблюдателя. Применение каждого из разработанных наблюдателей состояния является перспективным для оценки динамического момента с целью повышения астатизма системы векторного управления.
5. Оценена возможность применения наблюдателей состояния с постоянными коэффициентами при двузонном регулировании скорости. Установлено, что их применение является полностью возможным и эффективным, поскольку приводит к незначительному улучшению динамических свойств системы векторного управления в динамических режимах."(http://masters.donntu.ru/2005/eltf/bondarenko/diss/index.htm).
II. Разработка НТЦЭ "Вектор" "АДАПТИВНАЯ СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ"
"1.Разработана новая серия асинхронных электроприводов с векторными принципами управления, обладающая функциями адаптации к параметрам роторной цепи, механической части привода, динамическим неидеальностям инвертора и автонастройки параметров системы управления на параметры силового канала привода. Электропривод ориентирован на применение для управления механизмами и технологическими процессами, предъявляющими повышенные требования к динамическим характеристикам и диапазону регулирования скорости.
2.Представленный алгоритм компенсации неидеальностей инвертора напряжения позволил минимизировать влияние задержек переключения и "мертвой" зоны в коммутациях верхнего и нижнего ключей фазы на точность задания напряжения статора и, как следствие, снизить пульсации на малых уровнях скорости и расширить диапазон ее регулирования.
3.Алгоритм автонастройки параметров системы управления, реализованный в виде опции, позволяет на основе формирования в приводе специальных тестовых режимов, реализуемых исключительно внутренними средствами привода, автоматически определять активное сопротивление статора и ротора, индуктивность намагничивания, эквивалентную индуктивность рассеяния статора, момент инерции привода и на их основе рассчитывать все параметры и коэффициенты системы векторного управления.
4.Предложенный алгоритм адаптации к изменению параметров механической части привода, реализованный в виде опции, позволяет осуществлять первоначальную настройку системы управления на момент инерции привода в специальном тестовом режиме работы, а также вычислять момент инерции и момент нагрузки в обычном режиме работы привода, обеспечивая соответствующую настройку системы управления. Этот алгоритм может являться автономно-реализованной частью алгоритма идентификации и управления многомассовой нежесткой механической системой.
5.Алгоритм адаптации к температурному изменению постоянной времени ротора позволяет оценить величину Tr и Rr на основе взаимосвязи между потокосцеплением ротора и мгновенной реактивной мощностью АД, вычисляемой по напряжениям и токам статора, а также выполнить подстройку параметров системы управления по результатам этих оценок. В результате обеспечивается инвариантность характеристик привода к изменению Rr. Алгоритм прост в реализации, нечувствителен к Rs, не требует информации о скорости ротора, работоспособен вплоть до нулевой скорости."(http://vectorgroup.ru/articles/article4)
III. "Бездатчиковая система векторного управления с ориентацией по вектору потокосцепления ротора" Авторы: Дарьенков А. Б., Марков В. В., Титов В. Г. Нижегородский государственный технический университет.
Проведен краткий анализ качества оценивания требуемого сигнала в зависимости от интервала дискретности.
IV. "Системы непрямого регулирования скорости с наблюдателями состояния" Авторы: Толочко О.И., Писковатская О.В., Кудокоцев С.М. Донецкий национальный технический университет.
В данной статье проведен анализ двух вариантов наблюдателей состояния применительно к двигателю постоянного тока, предложен способ корректировки наблюдаемого сигнала скорости до фактического, реального значения путем вычисления статического тока и заведения соответствующей корректирующей связи на вход системы. Идея может успешно применяться в подобных системах, в частности, в векторном управлении.
Существуют математические модели АД, которые позволяют обходиться без датчика скорости, вычисляя ее текущую координату собственно по математическому описанию двигателя, но их точность и диапазон регулирования скорости при этом ухудшаются. Вторым вариантом восстановления координаты скорости является построение наблюдателя состояния, синтез которого будет описан в данной работе. Наиболее точное восстановление координаты достигается синтезом наблюдателя минимального порядка. Но на практике это оказывается не совсем оправдано из-за необходимости применения дополнительных устройств для измерения входного или корректирующего сигнала.
В данной работе описывается построение наблюдателя состояния полного (3-го) порядка, входом которого является задание напряжения на тиристорный преобразователь (выход регулятора тока). Главной наблюдаемой координатой является частота вращения. Корректирующая связь осуществляется по переменной состояния тока. При построении модели наблюдателя учитывалась противоЭДС, которая составила замкнутый контур, тем самым обеспечив наблюдаемость объекта. Коэффициенты корректирующих обратных связей рассчитывались, выбрав за желаемый полином Баттерворта.
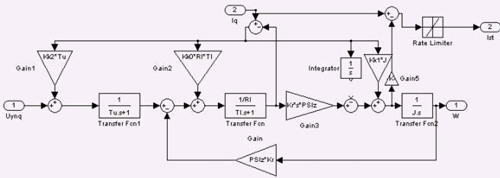
Рис.1 Модель наблюдателя состояния с идентификацией статического тока.
Для моделирования был выбран конкретный двигатель: МТК-12-6. При замыкании системы по собственным координатам и контролировании наблюдаемой скорости наблюдается появление ошибки между реальной и наблюдаемой скоростью, равной 20% .
В результате проведения исследований было определено 3 способа устранения ошибки:
1. Подбор собственной частоты наблюдателя w0. Для данной системы оптимальным значением оказалось 2/Tu, где Tu- постоянная времени тиристорного преобразователя. Ошибка составила 0%.
2. Добавление дополнительного интегратора в модель наблюдателя. Интегрируемая величина - разность токов двигателя и наблюдателя. Выход интегратора суммируется с моментом двигателя. Это также позволило полностью ликвидировать ошибку, при этом быстродействие системы не ухудшилось.
3. Идентификация статического тока и заведение его на вход системы. Данный способ позволяет построить систему, астатическую по нагрузке.
Применение комбинации 1-го и 2-го методов дает практически идеальное соответствие наблюдаемой и действительной скорости. Результаты представлены на Рис.2,3. Где : 0- собственная скорость, 1- w0=2/Tu, 2 - w0=1/Tu применен интегратор. 3 - w0=2/Tu , без интегратора.
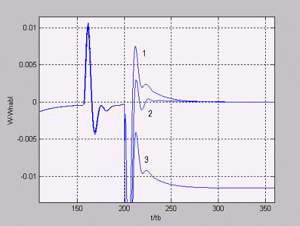
Рис.2. График зависимости ошибки оценивания скорости от нормированного времени в окрестности наложения нагрузки.
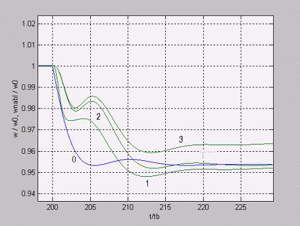
Рис.3. График зависимости нормированной реальной и наблюдаемой скорости от нормированного времени в окрестности наложения нагрузки.
Исходя из результатов исследования, можно сделать вывод о практически возможном применении данной модели наблюдателя для точной идентификации скорости в системах векторного управления АД.
В случае требования астатизма системы по возмущению применяется вычисление статического тока и заведение его через коэффициент Kis, равный отношению падения скорости в системе, замкнутой по наблюдаемой координате к падению скорости в разомкнутой системе на вход регулятора тока напрямую или же на вход регулятора скорости с обратным ему коэффициентом. Динамические свойства такой системы представлены на рисунках 4,5. При этом система замкнута по наблюдаемой скорости.
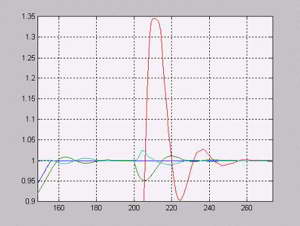
Рис.4. Динамические характеристики двигателя в окрестности наложения нагрузки.
На рис.4. красным обозначен ток, зеленым - скорость.
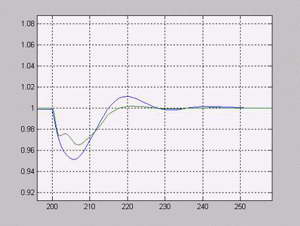
Рис.5. Точность оценивания скорости в окрестности наложения нагрузки.
На рис.5 синим показана реальная скорость, зеленым - наблюдаемая.
Хотя полученные результаты вполне можно назвать удовлетворительными, направлением моей дальнейшей деятельности все же будет улучшение качества переходных процессов, в частности, уменьшение перерегулирования и колебательности. Также будет проводиться дальнейший анализ существующих и поиск других способов устранения ошибки оценивания и возможностей построения астатической системы.
Литература
- Толочко 0.І. Аналіз та синтез електромеханічних систем зi спостерігачами стану: Навч. посібник. - Донецьк: Норд-Прес, 2004. - 298с.
- 2. Калашников В.И. Основы векторного управления асинхронным электроприводом без датчика скорости // Проблемы автоматизированного электропривода. Теория и практика : Сборник трудов научно технической конференции - Харьков: Основа, 1998. - С. 128-129.
- Литвинов Р.Д. Метод расположения корней характеристического полинома, обеспечивающий заданные степень устойчивости и колебательность системы . Автоматика и телемеханика. - 1995. - №4.-с.53-61.
- Толочко О.И., Коцегуб П.Х., Федоряк Р.В. Анализ линейных систем с наблюдателями состояния. // Вісник Харківського державного політехнічного університету. Збірка наукових праць. Тематичний випуск: Проблеми автоматизованого електроприводу. Терія і практика. - Харків: ХДПУ. - 2000. - №113. - С.78-82.
- Акимов Л.В., Долбня В.Т., Колотило В.И. Системі управления єлектроприводами постоянного тока с наблюдателями состояния: Монография. - Харьков: ХГПУ, 1998. - 117с.
- Толочко О.І., Пісковатська О.В., Кудокоцев С.М. Системи непрямого регулювання швидкості зі спостерігачами стану // Наукові праці ДонНТУ. Серія "Електротехніка і енергетика". - Донецьк: ДонНТУ. -2003. - №67. - с.168-173.
- Автореферат магистерской работы Бондаренко Е.А. http://masters.donntu.ru/2005/eltf/bondarenko/diss/index.htm
Автобиография | Ссылки | Отчет о поиске | Автореферат | Библиотека | О Мальте