АВТОРЕФЕРАТ
магистерской работы Полинского Сергея Владимировича:
Исследование современных систем позиционного электропривода
Научный руководитель:
Коцегуб Павел Хоритонович,
д.т.н., проф., зав. каф. ЭАПУ.
[Главная страница]
[Электронная библиотека]
[Ссылки]
[Отчёт о результатах поиска]
[Индивидуальное задание]
Eng
СОДЕРЖАНИЕ
- Обоснование и актуальность выбранной темы
- Связь работы с научными программами, планами, темами
- Цели и задачи работы
- Разработка цифрового задающего устройства, формирующего оптимальные диаграммы отработки перемещений
- Научная новизна
- Практическая реализация исследований
- Апробация результатов магистерской работы
- Публикации по теме магистерской работы
- Выводы
- Литература
Для систем позиционного электропривода предложено множество диаграмм изменения положения,
скорости, ускорения и рывка в функции времени при перемещении механизма из одного заданного
положения в другое. Основными из них являются диаграммы, оптимальные по быстродействию и по
тепловым потерям в якоре двигателя постоянного тока или в роторе асинхронного двигателя, с
учетом ограничений на скорость, ускорение, ток двигателя и рывок. С целью уменьшения ударов
в кинематических передачах в системах управления электроприводами предусматривают
ограничение не только скорости и ускорения, но и рывка.
Одним из способов ограничения рывка является установка на входе
системы автоматического управления задающего устройства (ЗУ), формирующего эталонные сигналы
задания на изменение основных координат электропривода.
Увеличение цен на энергоносители повышает актуальность принятия
решений, направленных на снижения непроизводительных затрат электроэнергии. С этой точки
зрения для управления позиционными электроприводами целесообразно использовать ЗУ,
формирующие диаграммы перемещения, оптимальные или квазиоптимальные по
тепловым потерям. Такие ЗУ могут быть успешно реализованы только в цифровой форме.
Однако известные формулы и алгоритмы расчета выходных сигналов задатчиков положения (ЗП),
как правило, выведены без учета эффекта квантования по времени [6, 7]. Это приводит к
существенным отклонениям формируемых управляющих воздействий от желаемых.
Весь комплекс исследований выполнен в Донецком национальном техническом университете согласно
научному направлению: "Исследование современных систем позиционного электропривода"
Основной целью данной работы является разработка алгоритма формирования
управляющих сигналов, для систем позиционного электропривода постоянного тока
с независимым и нерегулируемым возбуждением. Разработка алгоритма ведётся из условия
обеспечения минимума тепловых потерь в якоре двигателя при отработке заданного перемещения
за заданное время. Алгоритм разрабатывается с учетом ограничений на ток якоря и скорость
при наличии на валу двигателя постоянного по величине реактивного статического момента.
Целью работы также является разработка методики корректировки
алгоритмов цифровой реализации оптимальных по тепловым потерям диаграмм отработки заданных
перемещений в реальном времени с учетом эффектов квантования и экстраполяции.
Такая задача является актуальной, например, для приводов нажимных
устройств обжимных прокатных станов.
В большинстве работ, посвященных поиску управления, оптимального
по тепловым потерям [1-3], накладывают ограничение не на полный ток якоря, а на ускорение, пропорциональное
динамической составляющей тока или момента.
В работе [4] решена задача поиска оптимального управления в
условиях, сформулированных в данной работе, но в обратной постановке: обеспечить отработку
заданного перемещения при заданном уровне потерь за минимальное время. В ней, с помощью
принципа максимума Понтрягина, доказана оптимальность 6 типов возможных диаграмм изменения
тока, ускорения, скорости и перемещения и определены их параметры.
Поставленная задача оптимального управления и задача, решенная
в [4], тождественны между собой в том смысле, что их решение приводит к одинаковым законам
управления. Однако алгоритмы и формулы для расчета характерных точек оптимальных диаграмм
естественно будут отличаться друг от друга в зависимости от того, что именно задано: время
отработки перемещения или величина потерь.
Для программной реализации алгоритмов управления
электромеханическими системами в реальном времени обычно используют один из универсальных
или специализированных языков программирования. Более простым и удобным способом решения
поставленной задачи является использование программы структурного математического
моделирования Simulink пакета MatLab в режиме реального времени, который обеспечивается
приложением Real Time WorkShop [5]. Достоинствами такого способа реализации является
наглядность алгоритма, который представляется в виде структурной модели, удобство его отладки и
корректировки, отсутствие необходимости применения языков программирования, использование
одной и той же среды для математического моделирования и для управления приводом.
Однако при разработке Simulink-моделей ЗУ, способных
функционировать в реальном времени, нужно учесть, что далеко не все блоки стандартных библиотек
можно использовать совместно с приложением Real Time WorkShop. Кроме того, следует оценить
машинное время, затрачиваемое на формирование желаемого управляющего воздействия.
Таким образом основными задачами данной работы являются:
" Разработка алгоритма формирования диаграмм перемещения, оптимальных по тепловым потерям",
"Формирование оптимальных диаграмм перемещения в реальном времени",
"Корректировка алгоритмов цифровой реализации оптимальных по тепловым потерям диаграмм
отработки заданных перемещений в реальном времени с учетом эффектов квантования и
экстраполяции", "Формирование оптимальных по тепловым потерям диаграм позиционного
электропривода с заданным значением рывка".
Для формирования оптимальных диаграмм достаточно иметь только координаты узловых точек
графиков , однако для выбора нужной диаграммы необходимо еще знать и выражение для расчета
максимального значения скорости без учета ограничения на эту координату.
Возможные типы оптимальных диаграмм для поставленной задачи в относительных единицах
изображены на рисунке 1:
Рисунок 1 - Оптимальные по нагреву диаграммы отработки заданных перемещений
а, б, в - в диаграмме отсутствует участок движения с постоянной скоростью
(максимальная скорость не достигает уровня ограничения);
г, д, е - в диаграмме имеется участок работы с установившейся максимальной допустимой
скоростью ;
а, г - ток не достигает уровня ограничения ;
б, д - ток достигает уровня ограничения только при разгоне;
в, е - ток достигает уровня ограничения как при разгоне, так и при торможении.
Поскольку из трех сигналов связанных между собой
интегро-дифференциальными зависимостями, наиболее простую форму имеет задание на ускорение,
то при реализации управляющего воздействия в цифровой форме достаточно сформировать именно
этот сигнал, а оставшиеся координаты получить последовательным численным интегрированием
задания на ускорение или рассчитать по аналитическим формулам, выведенным посредством
интегрирования выражений на разных временных интервалах.
Для формирования оптимальных диаграмм достаточно иметь только
координаты узловых точек графиков, однако для выбора нужной диаграммы необходимо еще знать
и выражение для расчета максимального значения скорости без учета ограничения на эту координату.
Были найдены параметры всех диаграмм. Следует отметить, что
неполное уравнение четвертой степени относительно переменной j2
, полученное для диаграммы 1д, не имеет аналитического решения. Поэтому
его корни необходимо находить одним из численных методов. Из всех корней следует искать только
один, выбирая в качестве области его существования интервал [0, i0+ic] .
Следующей задачей является разработка алгоритма выбора одной из
оптимальных диаграмм в функции заданных значений. Этот алгоритм приведен на рисунке 2.
Рисунок 2 - Алгоритм выбора оптимальной диаграммы
При его формировании необходимо вначале рассчитать минимально
возможное время отработки заданного перемещения для диаграммы, оптимальной по
быстродействию. В такой диаграмме график скорости имеет форму треугольника или трапеции.
Поэтому, в первую очередь, определяется граничное перемещение, т. е. максимальное
перемещение, которое может быть отработано по треугольной тахограмме при наличии ограничений
на скорость и ускорение.
Если полученное время больше желаемого времени отработки
перемещения, то при заданных ограничениях невозможно сформировать ни оптимальную по нагреву,
ни даже оптимальную по быстродействию диаграмму. В этом случае заменяем заданное время
отработки минимально возможным и формируем диаграмму с треугольной или трапецеидальной
тахограммами.
В том случае, когда время отработки заданного перемещения не
лимитируется, время разгона и торможения можно определить как время, обеспечивающее минимум
миниморум потерь на нагрев [2].
Полученные формулы и алгоритм могут быть использованы в
цифровых задающих устройствах для формирования ими оптимальных законов управления
позиционными механизмами, работающими с постоянным моментом статического сопротивления.
Формулы можно представить в виде блоков Simulink без особых
трудностей. Но для вычисления максимального значения динамического тока для диаграммы
рисунок 1д необходимо решить неполное алгебраическое уравнение 4-ой степени с действительными
коэффициентами

Одними из самых простых численных методов решения
алгебраических и трансцендентных уравнений являются итерационные методы половинного деления,
хорд и касательных [8].
В библиотеке Math приложения Simulink имеется блок Algebraic
Constraint, обеспечивающий нахождение корней уравнения вида f(x)=0
путем создания алгебраической петли, но такой способ решения уравнений неприемлем для
приложения Real Time WorkShop.
На рисунке 3 представлена блок-схема алгоритма уточнения
заданного начального приближения корня уравнения f(x)=0 методом
касательных (называемым также методом Ньютона), а на рисунке 4 - Simulink-модель этого
итерационного алгоритма, в которой для организации циклического процесса использована
подсистема с разрешающим входом (Enabled Subsystem).
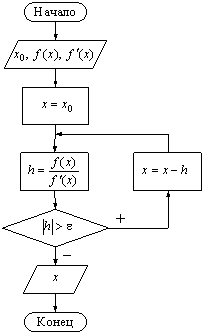
Рисунок 3 - Алгоритм решения алгебраических и трансцендентных уравнений
методом касательных
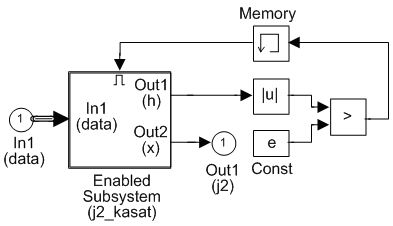
Рисунок 4 - Simulink-модель решения алгебраического уравнения
Развернутая модель этой подсистемы приведена на рисунке 5
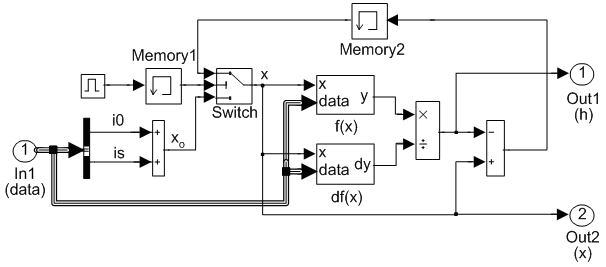
Рисунок 5 - Simulink-модель решения алгебраического уравнения
В подсистеме j2_kasat формируется начальное приближение корня и
выполняется тело итерационного цикла.
Значения функции, составляющей левую часть уравнения и ее
производной вычисляются в подсистемах f(x) и
df(x).
При достижении заданной точности итерационный цикл прерывается.
Параметр Threshold блока Switch установлен равным 0.5.
В схему рисунка 5 блок Memory1 включен для присваивания на первом
шаге итерационного процесса переменной её начального значения, а блок Memory2 - для ликвидации
алгебраической петли.
Как известно [8], метод Ньютона при неудачно выбранном начальном
приближении может оказаться расходящимся. В этом случае для уточнения корня на заданном
интервале можно использовать метод хорд или метод половинного деления. Для их реализации в
модели рисунка 4 достаточно изменить структуру подсистемы Enabled Subsystem.
Развернутая модель этой подсистемы при решении рассматриваемого
уравнения методами хорд и половинного деления представлена на рисунке 6.
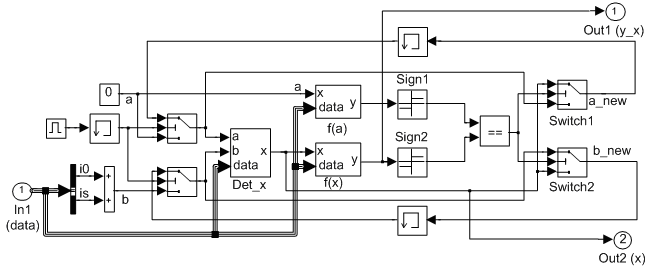
Рисунок 6 - Развернутая модель подсистемы Enabled Subsystem (j2_kasat)
при решении уравнения методами хорд или половинного деления
Следующим этапом является разработка методики корректировки
алгоритмов цифровой реализации оптимальных по тепловым потерям диаграмм отработки заданных
перемещений в реальном времени с учетом эффектов квантования и экстраполяции.
Задания на ускорение имеют участки с бесконечным
коэффициентом усиления, точность воспроизведения которых при использовании методов
численного интегрирования (ЧИ) с постоянным шагом, существенно ухудшается. Этот фактор
поразному сказывается на работе сравниваемых ЗП. При треугольной тахограмме это приводит
только к увеличению на один шаг ЧИ времени формирования сигналов без изменения их
установившихся значений, а при параболической тахограмме - еще и к нарушению симметрии
графика относительно оси времени. Вследствие этого в момент равенства задания на ускорение
нулю задание на скорость имеет отрицательное значение, а задание на перемещение уменьшается с
постоянным темпом, все больше отклоняясь от так и не достигнутого требуемого значения.
Даже принудительный сброс сигнала в ноль не решит возникшей проблемы. То же самое происходит
при замене аналоговых интеграторов дискретными с экстраполяцией нулевого порядка.
Для исправления этого недостатка, необходимо скорректировать
исходную непрерывную диаграмму изменения задания на ускорения таким образом,
чтобы получающаяся из нее после экстраполяции дискретная диаграмма стала симметричной.
Чтобы достигнуть такого результата, определим разность между
максимальным и минимальным зна-чениями ускорений дискретной диаграммы, разделим ее
пополам и сместим непрерывную диаграмму вверх на эту величину.
Анализ исходного и скорректированного в соответствии с
приведенными формулами графиков по-зволяет увидеть, что точно такого же результата можно
добиться смещением сигнала на полпериода дискретности вправо.
Причем такой способ коррекции оказывается справедливым и для
квазиоптимальных диаграмм, имеющих участки движения с постоянными значе-ниями скорости
и (или) ускорения, которые появ-ляются при учете ограничений на эти кординаты.
Предложенный способ коррекции сигнала задания на ускорение
позволяет устранить несоответствие между временами окончания переходных процессов по
сигналам задания на регулируемую координату и ее производные и сформировать основное
управляющее воздействие практически без ошибки в установившемся режиме.
Можно показать, что такой способ коррекции пригоден и для
оптимальных по тепловым потерям диаграмм, полученных при учете наличия на валу двигателя
постоянного статического момента [1].
Иначе обстоит дело с диаграммами, сформированными с учетом
ограничения на рывок [9]. В этом случае для совпадения экстраполированной дискретной и эталонной
тахограмм необходимо применить ЧИ сигнала задания на ускорение методом трапеций.
Для устранения установившейся ошибки в сигнале задания на
положение следует рассмотреть возможность использования цифрового интегратора,
выполняющего интегрирование методом Симпсона, на что будут направлены дальнейшие
исследования изучаемой проблемы.
Рассмотрим методику формирования оптимальных по тепловым
потерям диаграмм отработки заданного перемещения за заданное время, с уче-том ограничений на
скорость, ускорение и рывок.
В зависимости от соотношения перечисленных выше параметров
исследуемые диаграммы могут иметь одну из четырех форм, представленных на рисунке 7:
а) диаграмма с ограничением рывка, б) с ограничением рывка и скоро-сти, в) с ограничением рывка
и ускорения, г) с ограничением рывка, скорости и ускорения.
Рисунок 7 - Оптимальные по тепловым потерям диаграммы перемещения, сформированные с учетом ограничений на скорость, ускорение и рывок
При реализации приведенных диаграмм достаточно сформировать
сигнал задания на ускорение, а оставшиеся координаты (скорость и перемещение) получить его
последовательным интегрированием.
При известных выражениях для расчета максимальных значений
ускорения и скорости, можно составить алгоритм выбора необходимой диаграммы отработки
заданного перемещения, обеспечивающей оптимальные тепловые потери двигателя и заданные
значения рывка. В работе [10] представлена блок-схема алгоритма, который можно использовать
для решения и данной задачи, но для этого необходимо предварительно заменить формулы для
максимального ускорения и максимальной скорости соответствующими формулами, учитывающими
ограничение на рывок, а также применить формулы для расчета абсцисс точек излома графиков.
В результате поведенной работы было выведено неполное уравнение
четвертой степени относительно переменной j2, для диаграммы 1д, которое не имеет
аналитического решения. Найден его корень метододами численного решения уравнениий
(по методу касательных или по методу Ньютона, по методу хорд, по методу половинного
деления). Из всех корней выбран один, выбирая в качестве области его существования
интервал [0, i0+ic].
Установлено, что совпадение дискретной экстраполированной и эталонной аналоговой
тахограмм в моменты времени, кратные периоду прерывания, обеспечивается при использовании
интегрирования сигнала задания на ускорение методом левосторонних прямоугольников,
если ограничение на рывок отсутствует, и методом трапеций, если это ограничение
существует.
Установлено также, что при интегрировании параболического сигнала задания на скорость методами Эйлера или
методом трапеций сигнал задания на положение формируется с установившейся ошибкой, которую можно
рассчитать по формуле. При малом периоде дискретности эта ошибка будет незначительна.
Для устранения установившейся ошибки в сигнале задания на положение следует рассмотреть
возможность использования цифрового интегратора, выполняющего интегрирование методом
Симпсона.
Были выведены формулы перерасчёта диаграмм сучётом эффекта квантования по времени.
При проведении исследований позиционного электропривода постоянного тока воспользуемся
экспериментальной установкой расположенной в лаборатории 8109. Силовая часть установки
включает в себя два двигателя постоянного тока станочной серии (ПБСТ), два тиристорных
преобразователя типа ЭТ6. В качестве датчика скорости выступает тахогенератор, расположенный
на одном валу с исследуемой машиной М1. Валы исследуемой и нагрузочной машин соединены
жестко, без упругостей и зазоров. Со стороны нагрузочной машины М2 предусмотрена возможность
подключения тринадцатиразрядного кодового датчика КД3, который может выступать как в
качестве датчика скорости, так и датчика положения.
В качестве управляющей ЭВМ выступает IBM-PC совместимый компьютер Pentium III (600 Мгц).
Аналогово-цифровое преобразование сигналов обратных связей и цифро-аналоговое
преобразование управляющих воздействий осуществляется платой 5710 Octagon Systems.
Входные аналоговые сигналы, поступающие от датчика скорости и датчиков тока,
гальванически развязаны с помощью трех модулей 5В41 Analog Devices. Для гальванической
развязки выходных сигналов (задания на СИФУ) используется два модуля 7В22 того же
производителя Analog Devices.
Управляющая ЭВМ работает под управлением операционной системы реального времени QNX.
Она выгодно выделяется наиболее полным набором инструментальных средств,
к которым пользователь привык в DOS или UNIX, обеспечивает все неотъемлемые
составляющие системы реального времени: многозадачность, диспетчеризацию программ на
основе приоритетов и быстрое переключение контекста. Программно-аппаратная часть
установки состоит из одного узла, который является IBM PC совместимым офисным
компьютером (по составу аналогичен промышленному контроллеру) с необходимым набором
периферийных устройств, работающих под управлением ОС РВ QNX 4.25.
Период дискретности цифровой управляющей машины составляет 0,5 мс. Кроме функции
управления на систему возложены еще и функции визуализации с возможностью оперативного
управления системой с клавиатуры компьютера. Регистрация необходимых сигналов
(как внутренних, так и внешних сигналов системы) осуществляется с частотой 2кГц.
Предусмотрена возможность записи сигналов с заданной предысторией. Количество
записываемой информации ограничивается объемом выделяемой памяти из общего объема
оперативной памяти для данной задачи и составляет 16МБ.
Разработка системы управления электроприводом осуществлялась с помощью пакета Simulink в
среде MatLab. Для связи программы управления электроприводом используется драйвер платы
аналогового ввода-вывода 5710 Octagon systems.
В результате проведенных исследований, приведенные на рис. 1 диаграммы были
экспериментально получены и откорректированы с учётом дискретности системы.
Для просмотра, анализа и дальнейшей обработки зарегистрированных сигналов разработан
графический интерфейс в среде MatLab с помощью приложения Guide. Для удобства
использования по умолчанию вызывается папка C:\matlabR12\work\lab_109\data, в которой
представлены все файлы с расширением *.mat.
Основные положения магистерской работы и результаты исследований
обсуждались и были одобрены на Всеукраинском конкурсе студенческих научных работ
2005/2006 учебного года в секции "Элементы автоматизированного электропривода"
направления "Электромеханика" ( г. Днепродзержинск, 2006 г. ), на научно-технической
конференции на кафедре "Электротехника" ДонНТУ ( 2006 г.), на конференции, посвящённой
дню науки на кафедре "ЭАПУ" ДонНТУ ( 2006 г. ).
Полинский С.В., магистрант; Розкаряка П.И.,
аспирант; Толочко О.И., доц., д.т.н."Формирование оптимальных по тепловым
потерям диаграмм позиционного электропривода с заданным значением рывка". Автоматизація технологічних обє'ктів та процесів. Пошук молодих. Збірник наукових праць VI Міжнародної науово-технычної конференції аспірантів та студентів в м. Донецьку 24-27 квітня 2006 р. Донецьк, ДонНТУ, 2006. - С. 151-153.
"Особенности цифровой реализации оптимальных алгоритмом управления
позиционным электроприводом" Вісник кафедри "Електротехніка". За підсумками наукової
діяльності. студентів. - Донецьк, ДонНТУ, 2006 - С. 99-100.
1. Полученные в работе формулы и алгоритм могут быть использованы в
цифровых задающих устройствах для формирования ими оптимальных законов управления
позиционными механизмами, работающими с постоянным моментом статического сопротивления.
2. Численное решение несложных трансцендентных и алгебраических
уравнений может быть успешно выполнено в реальном времени в среде MatLab Simulink Real Time
WorkShop.
3. Для решения алгебраического уравнения, входящего в алгоритм
формирования оптимальных по тепловым потерям диаграмм перемещения, лучше всего
использовать метод касательных, отличающийся простотой модели алгоритма уточнения
корня в реальном времени и быстрой сходимостью итерационного процесса.
4. Предложенную методику и Simulink-модели решения уравнений
в реальном времени, не требующие написания S-функций, можно использовать и для решения других
задач в области цифрового управления электромеханическими системами.
5. При использовании методов ЧИ с постоянным шагом точность
воспроизведения участков с бесконечным коэффициентом усиления существенно ухудшается.
При реализации треугольной тахограммы это приводит только к увеличению времени
формирования сигналов на один шаг ЧИ, а при параболической тахограмме - к появлению
ошибки в выходном сигнале.
6. Для обеспечения качественной реализации параболической
тахограммы, необходимо скорректировать исходную непрерывную диаграмму задания
на ускорение путем смещения ее на полпериода дискретности вправо.
7. Совпадение дискретной экстраполированной и эталонной аналоговой
тахограмм в моменты времени, кратные периоду прерывания, обеспечивается при использовании
интегрирования сигнала задания на ускорение методом левосторонних прямоугольников,
если ограничение на рывок отсутствует, и методом трапеций, если это ограничение
существует.
8. При интегрировании параболического сигнала задания на скорость методами Эйлера или методом
трапеций сигнал задания на положение формируется с установившейся ошибкой, которую можно
рассчитать по формуле. При малом периоде дискретности эта ошибка будет незначительна.
Для устранения установившейся ошибки в сигнале задания на положение следует рассмотреть
возможность использования цифрового интегратора, выполняющего интегрирование методом
Симпсона.
9. В настоящее время стало возможным, с помощью цифровых систем
управления, реализовать алгоритмы работы оптимальных диаграмм. Что позволяет наилучшим
образом организовать оптимальную по быстродействию и потерям систему управления
электроприводами.
В настоящее время магистерская работа находится в состоянии разработки. Полное её окончание планируется на конец
декабря 2006 г.
ЛИТЕРАТУРА
- Кожевников К. И. Динамика тока двигателей вспомогательных механизмов прокатных станов.// "Электричество", 1956, №6, с 15-21.
- Петров Ю. П.. Оптимальное управление электроприводом. М. - Л., Госэнергоиздат, 1961. - 187 с
- Толочко О. И., Розкаряка П. И. Формирование оптимальных по нагреву диаграмм управления позиционным приводом с учетом ограничений на скорость и ускорение. // Збiрник наукових праць ДонДТУ. Серiя: "Електротехнiка i енергетика", вип.41 : Донецьк: ДонДТУ, 2002, с 159-163.
- Чистов В. П., Бондаренко В. И., Святославский В. А.. Оптимальное управление электрическими приводами. - М.: Энергия, 1968. - 231 с .
- Коцегуб П.Х., Толочко О.И., Федоряк Р.В. Практическая реализация цифровых САУ в среде пакета МАТЛАБ с использованием платформы реального времени "QNX TARGET" // Вісник Національного Технічного Університету "Харківський політехнічний інститут". Збірка наукових праць "Проблеми автоматизованого електроприводу. Теорія i практика".- Харків: НТУ "ХПI", 2002, №12. - Т.1. - С. 98-101.
- Костенко В.И., Коцегуб П.Х., Розкаряка П.И., Толочко О.И. Формирование оптимальных по нагреву диаграмм отработки заданных перемещений при наличии постоянного статического момента на валу двигателя // Вісник Національного Технічного Університету "Харківський політехнічний інститут". Збірка наукових праць "Проблеми автоматизованого електроприводу. Теорія i практика".- Харків: НТУ "ХПI", 2002, №12. - Т.2. - С. 350-354.
- Карнюшин Л.В., Пышкало В.Д., Рогачев А.И. Области существования оптимального управления электроприводами // Электромашиностроение и электрооборудование. Выпуск 15. Киев, "Техника", 1972. - С. 3-8.
- Демидович Б.П., Марон И.А. Основы вычислительной математики. М., Наука, 1970 г., 664 с.
- Чермалых А.В. Универсальная многоканальная задающая модель для систем управления пози-ционным электроприводом // Вісник Кременчу-цького державного політехнічного університету. - Кременчук: КДПУ. - 2004. - №2 (25). - С. 139-143.
- Мазин А.Ю., Розкаряка П.И. Алгоритм формирования оптимальных по нагреву диаграмм с различными видами ограничений // Автоматизація тех-нологічних об'єктів та процесів. Пошук молодих. Збірник наукових праць II Міжнародної науково-технічної конференції аспірантів та студентів в м. Доне-цьку 25-26 квітня 2002 р. - Донецьк: ДонНТУ. - 2002. - С. 168-170.
[Главная страница]
[Электронная библиотека]
[Ссылки]
[Отчёт о результатах поиска]
[Индивидуальное задание]