
Риc. 1 Розімкнута система "тиристорний регулятор напруги — асинхронний двигун"
Актуальність проблеми та її зв'язок з прикладними задачами
Тиристорний регулятор напруги (ТРН) широко застосовується для регулювання
параметрів асинхронних електроприводів. Він характеризується економічністю та плавністю регулювання
координат об'єкта керування — асинхронного двигуна. Силова схема ТРН передбачає наявність
трьох пар силових тиристорів, що з'єднані зустрічно-паралельно, та схеми імпульсно-фазового
управління (СІФУ), як це показано на рис. 1.
Риc. 1 Розімкнута система "тиристорний регулятор напруги — асинхронний двигун"
Практичне значення має дослідження умов використання ТРН як регулятора координат режиму рекуперативного гальмування асинхронного двигуна. Вказаний режим може мати місце при експлуатації шахтного бремсбергового конвеєра або видобувного комбайна на похилих та крутопохилих пластах.
Режим рекуперативного гальмування асинхронної машини (АМ) відрізняється економічністю, оскільки енергія, що виділяється під час гальмування, повертається до електричної мережі. Це дозволяє уникнути розсіювання енергії у вигляді тепла в активних частинах машини. Останнє може призвести до порушення теплового режиму експлуатації АМ, наслідком чого є зруйнування ізоляції.
Режим рекуперативного гальмування є базовим при експлуатації навантажувальних стендів для обкатки приводних блоків скребкових конвеєрів на Харківському машинобудівному заводі "Світло шахтаря" (ХМЗ). Принцип обкатки полягає у взаємному навантаженні двох однакових приводних блоків (з асинхронними двигунами середньої потужності), які кінематично з'єднані між собою через редуктор-прискорювач. До складу кожного приводного блоку входить асинхронний двигур, гідромуфта та редуктор.
На сьогоднішній день на ХМЗ використовуються тиристорні навантажувальні пристрої ТНУ-55, ТНУ-110 і ТНУ-400, що розраховані відповідно на 55, 110 та 400 кВт. Принцип регулювання пристроями ТНУ рівнів навантаження приводних блоків, що випробуються, полягає у використанні ТРН в ланцюзі статора асинхронного двигуна, що працює в руховому режимі (АДР). В той же час, асинхронний двигун, що працює в режимі рекуперативного гальмування (АДГ), є підключеним безпосередньо до живлячої мережі (рис. 2а).

Риc. 2 Спрощені структурні схеми навантажувального стенда: а — ТРН встановлений в ланцюзі АДР; б — ТРН — в ланцюзі АДГ; в — система при відсутності регулювання
Використання ТРН в ланцюзі статора АДР виявило істотні недоліки, пов'язані із значним підвищенням струму, що споживається цим двигуном [1]. Вказані негативні явища можуть бути усунені шляхом регулювання за допомогою ТРН координат АДГ за умови безпосереднього підключення АДР до електричної мережі (рис. 2б).
Таким чином, актуальним є всебічний аналіз системи "ТРН—АДГ" з метою відшукання способу формування проміжних рівнів навантаження приводних блоків під час випробувань.
Загальні принципи роботи ТРН з навантаженням, що має довільний фазовий кут, а також особливості функціонування, побудови і використання тиристорного регулятора з метою керування пуско-гальмовими та спеціальними режимами роботи асинхронного електропривода викладені в [3]. Питання тиристорного регулювання координат асинхронного електропривода, що працює в пуско-гальмових режимах, статичні та динамічні режими роботи таких приводів висвітлюються в [4].
В указаній спеціальній літературі при аналізі гальмових режимів роботи системи "ТРН — асинхронний двигун" перевага надається динамічному, конденсаторному та іншим видам гальмування, при цьому рекуперативне гальмування залишається поза увагою дослідників, незважаючи на переваги цього методу.
Питання експлуатації ТНУ в умовах Харківського машинобудівного заводу "Світло шахтаря" розкриті в [5]. В роботі [1] наведений порядок побудови комп'ютерної моделі навантажувального стенду ХМЗ та проведений аналіз існуючих при експлуатації системи негативних явищ.
 . . |
(1) |
Вектори струму статора АДР  та
АДГ
та
АДГ  відстають від
відстають від  на величину відповідних фазових кутів
на величину відповідних фазових кутів  і
і  (рис. 3). Вектор струму в загальній мережі
(рис. 3). Вектор струму в загальній мережі  утворюється
геометричним складанням векторів та :
утворюється
геометричним складанням векторів та :
 . . |
(2) |

Риc. 3 Векторна діаграма системи при відсутності регулювання
В результаті аналізу побудованої векторної діаграми (рис. 3) були зроблені наступні висновки.
1. Активні складові струму статора АДР  та АДГ
та АДГ  спрямовані зустрічно, що відповідає споживанню двигуном і віддачі генератором активної потужності
до загальної мережі. Активна складова загального струму знаходиться з виразу:
спрямовані зустрічно, що відповідає споживанню двигуном і віддачі генератором активної потужності
до загальної мережі. Активна складова загального струму знаходиться з виразу:
 , , |
(3) |
що свідчить про споживання АДР активної потужності з живлячої мережі лише для покриття втрат в системі.
2. Реактивні складові струмів АДР  та АДГ
та АДГ  знаходяться в фазі, що описується рівнянням:
знаходяться в фазі, що описується рівнянням:
 |
(4) |
Останній вираз свідчить про споживання як асинхронним двигуном, так і генератором реактивної потужності з живлячої мережі для створення головного магнітного потоку відповідно у кожній машині.
3. Для фазових кутів АДР і
АДГ та зсуву фаз в загальній мережі  виконується
співвідношення:
виконується
співвідношення:
 , , |
(5) |
що є наслідком виразів (1) і (2).
У загальному випадку фаза струму відносно напруги статора АМ в функції ковзання визначається зі схеми заміщення машини (рис. 4) через комплексний опір:
 , , |
(6) |
де  — комплексний опір АМ.
— комплексний опір АМ.

Риc. 4 Схема заміщення асинхронної машини
Графічна залежність зсуву фаз асинхронної машини від ковзання  ,
яка була побудована за виразом (6), наведена на рис. 5. Діаграма дозволяє встановити факт
перевищення кутом
,
яка була побудована за виразом (6), наведена на рис. 5. Діаграма дозволяє встановити факт
перевищення кутом  величини 90° у діапазоні від'ємних
значень ковзання, який відповідає генераторному режиму роботи АМ. Це підтверджує положення вектора
струму АДГ на діаграмі (рис. 3), який відстає від вектора
напруги мережі на кут
величини 90° у діапазоні від'ємних
значень ковзання, який відповідає генераторному режиму роботи АМ. Це підтверджує положення вектора
струму АДГ на діаграмі (рис. 3), який відстає від вектора
напруги мережі на кут  .
.

Риc. 5 Залежність зсуву фаз АМ від ковзання
Всебічне дослідження процесів в системі, що розглядається, може бути
проведене за допомогою комп'ютерного моделювання. На рис. 6 наведена структурна схема
випробувального стенду, що є основою при побудові комп'ютерної моделі [1]. Ця схема складається з
наступних структурних елементів: джерело трьохфазної симетричної напруги ( ); АДР; АДГ; ТРН, що включає
три пари зустріно-паралельно з'єднаних тиристорів з СІФУ; керуючий пристрій (КП), який дозволяє
задавати закон зміни кута відкривання тиристорів
); АДР; АДГ; ТРН, що включає
три пари зустріно-паралельно з'єднаних тиристорів з СІФУ; керуючий пристрій (КП), який дозволяє
задавати закон зміни кута відкривання тиристорів  в функції
часу. Механічний зв'язок роторів машин за допомогою системи редукторів та гідромуфт замінений
функціональним блоком МЧ (механічна частина), який описує взаємне навантаження АДР та АДГ в
функції величини напруги на АДГ, що задається відносним значенням напруги на виході ТРН
в функції
часу. Механічний зв'язок роторів машин за допомогою системи редукторів та гідромуфт замінений
функціональним блоком МЧ (механічна частина), який описує взаємне навантаження АДР та АДГ в
функції величини напруги на АДГ, що задається відносним значенням напруги на виході ТРН  .
.
Риc. 6 Структурна схема випробувального стенда — основа комп’ютерної моделі
При розробці моделі враховані припущення, що базуються на результатах експериментів з реальним об'єктом (заповнення рідиною гідромуфт є незмінним, тобто залишається постійним кут нахилу лінійних частин їх механічних характеристик; не враховані втрати в механічній частині системи та ін.).
Припустимо, що кут відкривання тиристорів
змінюється в функції часу  за лінійним законом:
за лінійним законом:
 |
(7) |
Вихідна характеристика КП  для цього випадку надана на рис. 7.
для цього випадку надана на рис. 7.
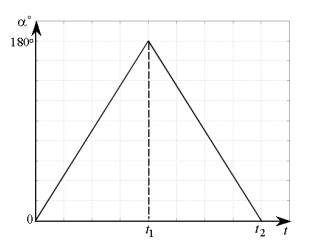
Риc. 7 Закон зміни кута відкривання тиристорів в функції часу — вихідна характеристика керуючого пристрою КП
Моделюванням системи "ТРН-АДГ" встановлено, що при вказаному законі зміни кута відкривання тиристорів як з додатною, так і від'ємною першою похідною має місце наявність декількох станів.
1.  ,
,  — режим безперервного
струму. В цьому режимі сигнал на керуючий електрод одного з тиристорів подається раніше моменту
переходу через нуль струму в сполученому тиристорі (рис. 8а). Криві миттєвих значень струму та
напруги генератора безперервні. Ефективне значення напруги на виході ТРН не змінюється і у
відносних одиницях дорувнює
— режим безперервного
струму. В цьому режимі сигнал на керуючий електрод одного з тиристорів подається раніше моменту
переходу через нуль струму в сполученому тиристорі (рис. 8а). Криві миттєвих значень струму та
напруги генератора безперервні. Ефективне значення напруги на виході ТРН не змінюється і у
відносних одиницях дорувнює  (рис. 9а). Ефективне значення
струму, ковзання та момент АДГ при зміні в указанному для
цього режиму діапазоні залишаються незмінними (рис. 9 б-г).
(рис. 9а). Ефективне значення
струму, ковзання та момент АДГ при зміні в указанному для
цього режиму діапазоні залишаються незмінними (рис. 9 б-г).
Риc. 8 Діаграми зміни миттєвих значень струму
(i*, в.о.) і напруги (u*, в.о.) для кожної фази, а також керуючі імпульси, що
подаються на тиристори, при різних значеннях кута :
а) ; б)  , де
— зсув фаз АДГ
, де
— зсув фаз АДГ
2. , —
проміжний режим. Часові діаграми зміни струму й напруги в фазах статора АДГ (рис. 8б) дозволяють
встановити наявність в напівперіоді вихідної напруги ТРН фрагментів як фазної (відкриті три
тиристори регулятора), так і лінійної (відкриті два тиристори) напруги, а також наявність в
кривій струму пауз на інтервалах відкритого стану двох тиристорів у сусідніх фазах. Період
повторення безструмових пауз (БСП) у кожній фазі складає 180°. Це визначає максимально
припустиму їх тривалість, яка забезпечує одночасну наявність струму в двох фазах генератора,
на рівні 180°/3=60°. При досягненні тривалістю БСП  значення 60° настає момент, коли безструмові паузи у яких-небудь двох фазах перекриваються
і АДГ залишається з'єднаним з мережею через один тиристор. Через цей тиристор струм перестає
текти через відсутність шляху замикання, що призводить до повного відключення генератора від мережі.
значення 60° настає момент, коли безструмові паузи у яких-небудь двох фазах перекриваються
і АДГ залишається з'єднаним з мережею через один тиристор. Через цей тиристор струм перестає
текти через відсутність шляху замикання, що призводить до повного відключення генератора від мережі.

Риc. 9 Діаграми, що пояснюють стани системи
"ТРН—АДГ" при лінійному законі зміни кута :
а) ефективне значення напруги на виході ТРН ();
б) ефективне значення струму статора АДГ (Iг); в) ковзання АДР (sд)
та АДГ (sг); г) момент АДР (Мд) та АДГ (Мг)
Засобами комп'ютерного моделювання була отримана графічна залежність
тривалості БСП від величини кута
при лінійному законі його зміни (рис. 10). Аналіз наведеної залежності дозволив встановити наступне:
— при  безструмові паузи
відсутні
безструмові паузи
відсутні  — розглянутий у п.1 режим безперевного
струму;
— розглянутий у п.1 режим безперевного
струму;
— при  величина
збільшується практично монотонно до критичного значення
величина
збільшується практично монотонно до критичного значення  ,
якому відповідає
,
якому відповідає  ;
;
— при досягненні кутом
критичного значення  настає відключення АДГ від мережі,
а при відсутності струму в фазах тривалість БТП
наближається до безкінечності, що підтверджує графік на рис. 10.
настає відключення АДГ від мережі,
а при відсутності струму в фазах тривалість БТП
наближається до безкінечності, що підтверджує графік на рис. 10.
Риc. 10 Залежність тривалості безструмових
пауз від значення кута керування
Через несинусоідальність струму в ланцюзі ТРН — АДГ для режиму, що
розглядається, величина фазового кута між струмом і напругою мережі ,
при збільшенні кута змінюється, в напрямку зменшення,
не залишаючись постійною в кожен момент часу. При цьому виконується співвідношення:
 , , |
(8) |
що підтверджує рис. 8б.
Отримані на моделі, що розглядається, (при прийнятих припущеннях та
спрощеннях) результати не дають можливості стверджувати про наявність глибокого регулювання
системи в даному діапазоні зміни кута (рис. 9 а-г).
3.  , —
безструмовий режим. Після відключення генератора від мережі, яке мало місце при досягненні кутом
керування критичного рівня (
, —
безструмовий режим. Після відключення генератора від мережі, яке мало місце при досягненні кутом
керування критичного рівня ( ), подальше збільшення кута
керування жодним чином не впливає на стан системи.
), подальше збільшення кута
керування жодним чином не впливає на стан системи.
4.  ,
,  —
безструмовий режим. При зменшенні величини кута керування від 180° до 120° зміни в системі
не мають місце — генератор відключений від мережі. При досягненні кутом значення 120—
робота АДГ відновиться в режимі безперервного струму, оскільки буде забезпечена можливість
одночасного ввімкнення двох тиристорів протилежної провідності в різних фазах. Після закінчення
перехідних процесів (на рис. 9 не надані) відновлюється нормальне функціонування тиристорів у всіх
трьох фазах.
—
безструмовий режим. При зменшенні величини кута керування від 180° до 120° зміни в системі
не мають місце — генератор відключений від мережі. При досягненні кутом значення 120—
робота АДГ відновиться в режимі безперервного струму, оскільки буде забезпечена можливість
одночасного ввімкнення двох тиристорів протилежної провідності в різних фазах. Після закінчення
перехідних процесів (на рис. 9 не надані) відновлюється нормальне функціонування тиристорів у всіх
трьох фазах.
5.  , —
режим безперервного струму. Оскільки відновилася нормальна робота ТРН (величина кута стала менше )
має місце безпосереднє підключення АДГ до мережі. Тиристорний регулятор не чинить ніякого впливу
на систему (рис. 9 а-г).
, —
режим безперервного струму. Оскільки відновилася нормальна робота ТРН (величина кута стала менше )
має місце безпосереднє підключення АДГ до мережі. Тиристорний регулятор не чинить ніякого впливу
на систему (рис. 9 а-г).
— наявність трьох станів системи: режиму безперервного струму,
безструмового та проміжного режимів;
— умови переходу системи "ТРН — АДГ" в кожен з вказаних станів;
— залежність порядку зміни режимів роботи системи від знаку першої
похідної лінійної функції зміни кута відкривання тиристорів в залежності від часу;
— несталість миттєвих значень та загальну тенденцію до зниження
фазового кута АДГ в режимі регулювання через несинусоідальність струму в фазі генератора, а
також отримати графічну залежність тривалості безструмових пауз при зміні кута керування
тиристорами.
Отримані результати щодо діапазону та динамічних властивостей зміни величини навантаження приводних блоків за умов використання системи "ТРН — АДГ" дозволяють обґрунтувати припущення щодо додаткового оснащення системи реактивними опорами з боку статорного ланцюга АДГ з метою поліпшення умов регулювання його координат.
| Повернутися до бібліотеки | На початок статті |
| Вернуться в библиотеку | К началу статьи |