Вигдергауз Наталья Леонидовна
e-mail:Natusya_Vg@mail.ru
факультет КИТА
Тема магистерской работы:
"ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК УСТРОЙСТВА ОПРЕДЕЛЕНИЯ НАГРУЖЕННОГО СОСТОЯНИЯ ОБЪЕКТОВ"
Автореферат магистерской работы
ВВЕДЕНИЕ
Эффективное внедрение в промышленность систем автоматизации, наряду со специализацией производства, унификацией и нормализацией номенклатуры выпускаемой продукции и механизацией производства, опирается на высокую оснащенность предприятий специальными измерительными приборами для надежного контроля качества, эксплуатационных и физических свойств изделий. Развитие автоматизации промышленного производства идет по пути постепенного перехода от регулирования отдельных параметров к связанному регулирования множества параметров и в итоге к автоматизированным системам управления производством. Внедрение таких систем предполагает создание специализированных информационно - измерительных систем для сбора данных о ходе процесса и состоянии объектов с последующей централизованной обработкой поступающей информации вычислительными и управляющими машинами.
Общей чертой автоматизации производственных процессов является постоянно растущее значение измерений неэлектрических величин и повышение роли вычислительных устройств в замкнутой цепи управления.
Электрические приборы для измерения неэлектрических величин состоят из трех основных узлов: первичного преобразователя, измерительной схемы и устройства отображения. Достоинства приборов в целом, как правило, определяются характеристиками первичного преобразователя неэлектрической величины в электрическую. Чтобы полностью использовать достижения современной измерительной техники электрических величин, преобразователи должны обладать высокими метрологическими свойствами.
Назначение измерительной схемы – представление выходного сигнала преобразователя в виде, удобном для передачи на вход исполнительного устройства, регистратора или визуального представления. Наиболее важной тенденцией совершенствования измерительных схем является широкое применение унифицированных элементов аналоговой и цифровой техники в микромодульном исполнении.
ХАРАКТЕРИСТИКА ОБЪЕКТА КОНТРОЛЯ. АКТУАЛЬНОСТЬ РАЗРАБОТКИ
При строительстве зданий и сооружений для предотвращения их разрушений и принятия, по необходимости, своевременных мер по укреплению конструкции, возникает необходимость определения напряжений в их конструкциях, определения и контроля наиболее уязвимых мест в сооружении. Это связано с различными ветровыми и снеговыми нагрузками, но, в большей степени, с различного рода усадками почвы (из-за подземных вод, горных выработок и т.д.). Автоматический регулярный контроль значительно упростит данную задачу. Особо актуальна эта проблема в Донецком регионе. В Донбассе имеется большое количество промышленных зданий и сооружений, основой которых являются сложные пространственные металлические и железобетонные конструкции, и расположенных на подрабатываемых территориях (над горными выработками). При их эксплуатации важно наличие возможности контроля напряжений в элементах здания, возникающих под воздействием внешних факторов. Это позволит оперативно реагировать на опасные изменения и избежать аварийных ситуаций.
ПОСТАНОВКА ЗАДАЧИ НА ПРОЕКТИРОВАНИЕ
Устройство контроля нагруженного состояния зданий. Задачей разрабатываемого прибора является измерение и контроль параметров сил здания. Данные параметры определяются силой, воздействующей на датчики. Прибор имеет несколько каналов измерения (их количество может меняться в зависимости от конструкции и размеров здания), т.к. необходимо учитывать изменения силы в разных точках объекта. Для определения величины нагрузки зданий на фундамент проектируемый прибор должен иметь микропроцессорную систему. Данная система на основании сигналов, поступающих с измерительных каналов, рассчитывает значения параметров и выводит их на индикатор. Осуществляется измерение нагрузки на датчик и результатом будет получение соответствующего напряжения U.Далее полученное значение сравнивается с заданным и определяется величина отклонения измеренной нагрузки от установленной. Если эта величина превышает допустимую, то на индикатор должен выводиться сигнал тревоги.
ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕХНИЧЕСКОГО ЗАДАНИЯ
На основании проведенного анализа существующих методов и средств измерения силы, исследования принципа действия и свойств магнитоупругих преобразователей, а также исходя из современных требований к точности и надежности измерений, разработаны следующие основные положения технического задания на разрабатываемый прибор:
Диапазон измерения одного датчика, т…………………….0..90
температурные условия работы, °С………………………-40..+50;
класс точности прибора,…………………… 1;
номинальное напряжение питания, В ……………………220/21;
номинальная частота питающей сети, Гц …………………… 50;
колебания напряжения питающей сети, % ……………………-10/+15.
АНАЛИЗ СУЩЕСТВУЮЩИХ МЕТОДОВ
Ниже описаны некоторые уже существующие системы контроля состояния зданий.
Система мониторинга с использованием в качестве датчиков GPS-аппаратуры (Global Positioning System). В ее основе - точные геодезические GPS-приемники. Данная геодезическая спутниковая аппаратура позволяет ежесекундно измерять положение объекта. В сущности, современный GPS-приемник представляет собой координатный детектор, позволяющий точно отслеживать изменение положения самых различных объектов в пространстве. Система контроля состояния зданий с помощью GPS-аппаратуры работает так. В контрольной точке на крыше или куполе здания устанавливается стационарная антенна высокоточного GPS-приемника, непрерывно регистрирующего свое положение в пространстве и передающего текущие трехмерные координаты в компьютер по проводной или беспроводной сети связи. Таких точек на здании может быть сколько угодно. Координаты контрольной точки, вследствие колебаний здания, будут непрерывно изменяться, но в определенных пределах. Если смещение контрольной точки, вне зависимости от вызвавших ее причин, превысит опасный для этого здания порог, подается сигнал тревоги. Пороговых уровней может быть несколько.
Однако, такая система оказывается дорогостоящей, так как необходимо использовать спутники. К тому же ежесекундно измерять положение здания нет смысла. Режим круглосуточного мониторинга вообще мало эффективен, а потому и не целесообразен, поскольку обрушение сооружений происходит в основном по двум схемам: либо с постепенным накоплением напряжений и деформаций и последующим обрушением несущих конструкций, либо быстротечно (прогрессирующее обрушение) при возможно даже кратковременном, но существенном перегрузе важного несущего элемента конструкций, при разрушении которого и возможно последующее прогрессирующее обрушение.
При первой схеме обрушения, как показывает многолетний опыт обследований и мониторинга зданий и сооружений, нет необходимости вести непрерывный контроль деформаций конструкций, достаточно его вести периодически, например один раз в год. Защитой от обрушения по второй схеме в настоящее время может быть только надежный расчет несущих элементов конструкций и соответствующие конструктивные мероприятия, обеспечивающие недопустимость прогрессирующего обрушения, потому что при такой схеме обрушения не могут помочь какие-либо системы контроля деформаций строительных конструкций, так как, если процесс начался, то в силу его быстротечности, равносильной взрыву, даже предварительное обнаружение не позволяет предпринять какие-либо действия по его предотвращению или спасению людей и оборудования.
Также существует методика динамического зондирования несущих конструкций, основанная на анализе изменения передаточных функций, построенных для различных по высоте участков здания. Под передаточной функцией части здания понимается отношение компонент спектров мощности зарегистрированных сигналов в двух точках здания, а именно: в месте динамического воздействия, заданного, например, в виде широкополосного импульса от неупругого удара, и в месте регистрации отклика этого воздействия. Такая передаточная функция характеризует напряженно-деформированное состояние конструкций именно в той части здания, через которую прошел заданный импульс.
Изменение передаточной функции (коэффициентов усиления для различных частот) для какой-либо части здания свидетельствует об изменении напряженно-деформированного состояния конструкций именно в этой части здания, что позволяет локализовать место такого изменения в пределах количества этажей здания между соседними точками измерения. Для высотных зданий целесообразно проводить измерения через каждые пять этажей, ограничивая область локализации изменения напряженно-деформированного состояния в пределах этой этажности. При выявлении значительных различий в передаточных функциях для каких-либо частей здания переходят к традиционному обследованию этих частей и определяют степень опасности произошедшего изменения напряженно-деформированного состояния конструкций и необходимость их восстановления или усиления. Таким образом удается не только оперативно отслеживать те области здания, где произошли изменения напряженно-деформированного состояния конструкций, но и существенно сократить затраты времени и трудоемкость проводимого затем традиционного обследования высотного здания.
Данный метод разработан для мониторинга высотных зданий, нас же интересует универсальная, простая в конструкции система, позволяющая контролировать и малоэтажные промышленные сооружения.
Выбор первичного измерительного преобразователя.
Для измерения силы широко используются тензодатчики.
Тензодатчик представляет собой прибор, преобразующий механическую величину (силу или пропорциональную ей деформацию) в электрический сигнал.
Одна из основных частей любого тензодатчика — силоизмерительный упругий элемент из специальной легированной стали. На его поверхности расположены преобразовате¬ли, выполненные из проволоки, обладающей особым свойством—тензочувствительностью, т. е. способностью изменять сопротивление электрическому току при деформации.
Устройство проволочного преобразовате¬ля, или решетки, показано на рис.1. Проволочные преобразователи, наклеенные на упругие элементы клеем БФ-2, соединены в схему равноплечего электрического моста. Наклеенные вдоль оси действия силы веса проволочные преобразователи называются активными, а перпендикулярно оси — компенсационными. Первые испытывают наибольшую деформацию и создают наибольший разбаланс электрического моста, вторые деформируются значительно в меньшей степени и служат для температурной компенсации изменений сопротивления преобразователей при колебаниях температуры окружающей среды и повышения чувствительности.
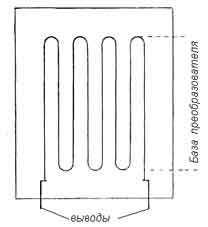
Рисунок 1 – Устройство проволочного преобразователя
Электрическая схема тензодатчика представлена на рис.2. На этом рисунке R+dR – проволочные преобразователи, работающие на растяжение, а R-dR – проволочные преобразователи, работающие на сжатие. Их сопротивления при нагрузке соответственно увеличиваются и уменьшаются на величину dR.
При отсутствии нагрузки все четыре сопротивления равны по величине и мост сбалансирован. Сопротивление R6 служит для устранения начального разбаланса моста тензодатчиков, возникающего из-за неравномерного натяжения проволочных преобразователей при наклейке.
Проволочные преобразователи на всех четырех плечах моста обеспечивают автоматическую температурную компенсацию моста при изменении окружающей температуры. При повышении или понижении температуры все четыре сопротивления плеч моста получают одинаковые приращения, и баланс моста не нарушается.
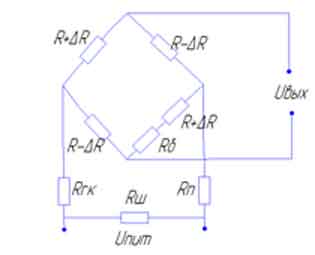
Рисунок 2 - Электрическая схема тензодатчика.
В цепь диагонали питания включается подгоночное сопротивление Rn , которое подбирается таким образом, чтобы чувствительность всех тензодатчиков одного типа была одинаковой.
Для компенсации изменения упругих свойств силоизмерительного элемента при колебаниях температуры в цепь диагонали питания моста тензодатчика включено сопротивление термокомпенсации Rтк. С увеличением температуры упругость элемента уменьшается, а с уменьшением температуры увеличивается. Соответственно при одной и той же нагрузке меняется его деформация, а следовательно, и величина электрического сигнала. При повышении температуры этот сигнал необходимо уменьшить, при понижении — увеличить. Сопротивление Rтк изготовлено из тонкого медного провода. С ростом температуры величина Rтк возрастает и гасится несколько большая часть напряжения, подаваемого на диагональ питания тензодатчика. При понижении температуры величина Rтк уменьшается и гасится несколько меньшая часть напряжения питания. Соответственно изменяется величина выходного сигнала тензодатчика.
Сопротивление Rш служит для подгонки входного сопротивления тензодатчиков.
Рассмотренные выше тензодатчики обладают рядом недостатков:
материалы, из которых изготовлены тензодатчики сильно зависят от температуры (что очень важно для измерений, производящихся в различных погодных условиях);
в них нет автоматической установки на ноль.
Наличие этих двух недостатков уменьшает надежность и точность измерений.
Магнитоупругие датчики. Вопрос о максимальной точности, которая может быть достигнута при измерении усилий с помощью магнитоупругих датчиков, по существу, является вопросом о перспективности дальнейшего развития работ по широкому применению силоизмерителей этого вида. Техническая и экономическая целесообразность применения магнитоупругих датчиков в различных отраслях промышленности в случаях, когда допустимы погрешности, превышающие 2-3% , в настоящее время ни у кого не вызывает сомнений. С помощью магнитоупругих датчиков оказываются выполнимыми самые различные задачи измерения усилий, причем обеспечиваются они при высокой надежности, компактности и конструктивности устройств. По работоспособности, долговечности, устойчивости в работе устройства этого класса не имеют себе равных.
Погрешности измерений, не превышающие 1-0,5%, вполне достижимы.
Температурная погрешность (среднеквадратичное значение) при колебаниях температуры датчика до 100° С не выходит за пределы 0,5%, при сужении температурного диапазона — она соответственно уменьшается. Среднеквадратичное значение погрешности от магнитоупругого гистерезиса не превышает 0,2%.
Среднеквадратичная погрешность, возникающая вследствие нелинейности характеристики, во всем диапазоне измеряемых усилий (100%) не превышает 0,3%. В более узком диапазоне (80%) не выходит за пределы 0,1%. Если принять, что погрешность, возникающая вследствие нестабильности источника питания, составляет 0,2%, общая среднеквадратичная погрешность не выйдет за пределы 0,65%.
Данные достоинства делают возможным применение магнитоупругих датчиков в устройстве контроля нагруженного состояния зданий.
Преобразование измеряемого механического параметра в электрическую величину в магнитоупругом датчике (МД) осуществляется последовательно в три основных этапа .
На первом этапе происходит преобразование измеряемого параметра в механическое напряжение в материале чувствительного элемента датчика.
Конструктивными элементами датчика, осуществляющими механическое преобразование, являются внешний механический преобразователь и чувствительный элемент.
С помощью внешнего механического преобразователя измеряемый параметр может изменяться по величине, знаку или виду. Так, например, в некоторых датчиках, измеряющих растягивающее усилие, измеряемый параметр преобразуется в усилие сжатия чувствительного элемента, а в датчиках, измеряющих сжимающее или растягивающее усилие, параметр преобразуется в усилие скручивания чувствительного элемента и т. п.
На втором этапе происходит преобразование напряжения, возникающего в материале чувствительного элемента, в изменение его магнитных характеристик.
На третьем этапе изменения магнитных характеристик материала чувствительного элемента преобразуются с помощью электромагнитного преобразователя в изменение выходных электрических параметров датчика.
В катушечном магнитоанизотропном датчике (рис. 3) суммарный вектор магнитного потока, сцепленного с катушкой возбуждения 1, направлен внутри чувствительного элемента 3 под углом 45° к векторам главных механических напряжений. Магнитная ось изме¬рительной катушки 2 расположена перпендикулярно к оси катушки возбуждения, благодаря чему при отсутствии измеряемой нагрузки и полной магнитной изотропности материала чувствительного элемента потокосцепление с измерительной катушкой 2, а следовательно, и коэффициент взаимоиндукции равны нулю.
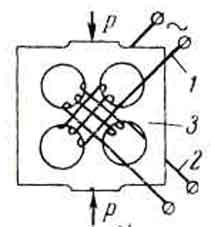
Рисунок 3 – Катушечный магнитоанизотропный датчик.
При действии измеряемого усилия магнитное поле внутри чувствительного элемента становится асимметричным, поэтому появляется составляющая магнитного потока, сцепленная с измерительной катушкой, в которой наводится э. д. с., являющаяся функцией измеряемого усилия.
Таким образом, после анализа средств и методов измерения контролируемого параметра, а также условий проведения измерений, в качестве первичных измерительных преобразователей выбраны магнитоупругие датчики.
ОРИЕНТИРОВОЧНАЯ СТРУКТУРНАЯ СХЕМА РАЗРАБАТЫВАЕМОГО ПРИБОРА
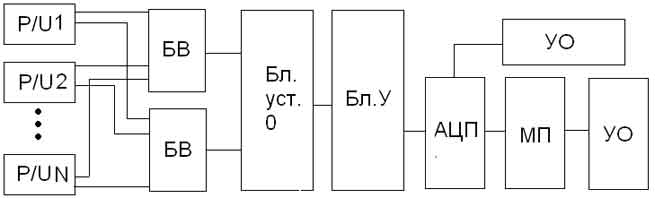
Рис.4 - Ориентировочная структурная схема прибора контроля нагруженного состояния зданий.
Количество датчиков зависит от конструктивных особенностей и размеров контролируемого объекта.
На схеме БВ - блок выпрямления сигнала, после которого сигнал поступает в блок установки нуля. Затем сигнал усиливается. Так как выходные сигналы измерительных каналов являются аналоговыми, то необходим аналого-цифровой преобразователь для преобразования их в цифровую форму. Для отображения результатов измерений предусмотрено устройство отображения. Микропроцессор осуществляет необходимые расчеты для сравнения измеренной величины с заданной.
ЗАКЛЮЧЕНИЕ
В данной работе проведен обзор и анализ существующих методов и средств измерения контролируемого параметра. В результате анализа выявлены недостатки каждого метода и, в соответствии с современными требованиями и условиями эксплуатации, выбран в качестве чувствительного элемента магнитоупругий датчик. Поставлена задача на проектирование для разрабатываемого прибора и разработаны основные положения технического задания, в соответствии с этим разработана ориентировочная структурная схема проектируемого прибора.
Литература
1.Гинзбург В.Б. Магнитоупругие датчики. – М.: Энергия, 1970. – 72с.
2.Воробьев С.А. Электрические измерения неэлектрических величин. – Свердловск:УПИ, 1975. – 231с.
3.Гуманюк М.Н. Магнитоупругие силоизмерители. – К.: Техника, 1981. – 183с.
4.Методы и средства измерения неэлектрических величин. Под ред. Петухова В.И. – Рязань, 1973. – 154с.
5.С.Шалманов.Как работает GPS-мониторинг. (http://www.cnews.ru/cgi-bin/oranews/get_news.cgi?tmpl=com_print&news_id=156842)
6.Гурьев В.В.,Дорофеев В.М.Обеспечение безопасности работы несущих конструкций высотных зданий.( http://www.stroinauka.ru/detailview.asp?d=12&dc=26&dr=5139)
|