
 ДонНТУ >
Портал магистров ДонНТУ
ДонНТУ >
Портал магистров ДонНТУ

Автобиография | Реферат | Библиотека | Ссылки |
Отчет о поиске | Индивидуальное задание
Магистр ДонНТУ
Хижняк В.А.
Тема магистерской работы:
"Исследование систем управления асинхронным двигателем
при изменении параметров объекта управления"
Автореферат
Вводная часть
Актуальность
В новом столетии на смену двигателям постоянного тока приходят асинхронные двигатели. Асинхронный двигатель зарекомендовал себя, как наиболее простой и экономически выгодный. В самом распространенном асинхронном двигателе с короткозамкнутым ротором нет никаких скользящих контактов, а единственный узел, требующий периодического контроля – это подшипники.
В последние двадцать лет, в связи с развитием силовой и микропроцессорной элементной базы и появлением программных средств, которые облегчают анализ и синтез сложных систем управления, возрос интерес к сложным системам автоматического управления (САУ) асинхронным двигателем. Кроме этого имеются удачные серийные комплектные системы управления асинхронным двигателем, которые находят свое применение в различных отраслях промышленности.
Исследователями разработано множество САУ асинхронным двигателем. Но существующие системы разработаны со многими допущениями и не позволяют отследить и учесть изменения параметров объекта управления. Сделанные допущения в конечном счете ухудшают динамические и статические характеристики систем управления.
Цель и задачи
Цель работы – исследовать системы управления асинхронным двигателем при изменении параметров объекта управления.
Для решения поставленной цели необходимо решить следующие задачи:
1. Разработать уточненную математическую модель асинхронного двигателя, которая будет учитывать изменение параметров двигателя;
2. Исследовать чувствительность систем управления к изменению параметров двигателя;
3. Улучшить качество управления асинхронным двигателем, применяя классические и новые методы управления.
Обзорная часть
Одним из важнейших требований к системам управления асинхронным двигателем (АД) является низкая чувствительность характеристик привода к изменению параметров объекта управления. Как правило, наиболее существенным изменениям подвержены активные сопротивления обмоток, зависящие от температуры, и параметры механической части привода. При разработке высококачественного электропривода необходимо также учитывать изменения индуктивностей в зависимости от степени насыщения магнитной системы двигателя. Влияние этих параметров на качество процессов регулирования асинхронным электроприводом рассмотрены в
[1-10].
Основной причиной изменения параметров электромеханической системы во время эксплуатации является дрейф активных сопротивлений силовых цепей. Отметим, что есть общий нагрев электрической машины, а есть локальный нагрев. Темп нагрева зависит от постоянных времени нагрева конструктивных частей двигателя. В результате локального нагрева активное сопротивление обмотки может за короткий промежуток времени (несколько минут) увеличиться на 50-60%.
Особенно чувствительными к изменению активного сопротивления системы электропривода с векторным управлением. Это связано с тем, что по данным о параметрах привода определяются модуль и угловое положение вектора потокосцепления. В [10] отмечается, что ошибка в определении активного сопротивления ротора АД на 25% приводит к значительному ухудшению качества регулирования, может даже привести к потере устойчивости. От активных сопротивлений значительно зависят динамические свойства системы, т. к. они входят в выражение для расчета постоянных времени контура тока привода.
Активные сопротивления также существенно влияют на энергетические показатели системы и на механическую характеристику асинхронного двигателя. Электрические потери в АД составляют больше половины общих потерь в электромеханической системе.
Энергетический подход используется в [2] для адаптации к температурному изменению активного сопротивления ротора при реализации цифровой релейно-векторной системе управления асинхронным электроприводом. В [2] разработана система релейно-векторного управления асинхронным электроприводом для микроконтроллерной реализации обеспечивающая динамические характеристики привода, близкие к предельно достижимым в рамках действующих физических ограничений на значения напряжения питания и динамические свойства ключей инвертора напряжения. В рассматриваемой системе релейный контур тока реализует скользящий режим слежения за мгновенными значениями токовых ошибок и обеспечивает их нахождение в пределах малого интервала коэффициента рассеяния  , не содержит координатных преобразований, формирует энергетически эффективные алгоритмы переключения ключей инвертора, нечувствителен к параметрам двигателя и к ограниченным по значению ошибкам измерения вектора эквивалентного напряжения,
обеспечивает максимально полное использование имеющегося в приводе ресурса управления в динамических режимах больших отклонений токовых ошибок.
, не содержит координатных преобразований, формирует энергетически эффективные алгоритмы переключения ключей инвертора, нечувствителен к параметрам двигателя и к ограниченным по значению ошибкам измерения вектора эквивалентного напряжения,
обеспечивает максимально полное использование имеющегося в приводе ресурса управления в динамических режимах больших отклонений токовых ошибок.
На динамические характеристики электропривода, на ряду с изменениями активных сопротивлений, влияет и изменение взаимной индуктивности. Процессы в электроприводе рассмотренные в [2], будут отклоняться от расчетных при изменении  во второй зоне регулирования скорости в зависимости от уровня потокосцепления. Для минимизации этого фактора можно использовать в регуляторах учет статической зависимости
во второй зоне регулирования скорости в зависимости от уровня потокосцепления. Для минимизации этого фактора можно использовать в регуляторах учет статической зависимости  . Цифровая реализация компенсации обеспечивается перерасчетом параметров регуляторов и наблюдателя в режиме реального времени с учетом зависимости .
. Цифровая реализация компенсации обеспечивается перерасчетом параметров регуляторов и наблюдателя в режиме реального времени с учетом зависимости .
Исследованием систем управления асинхронными двигателями в ДонНТУ занимались следующие магистры:
1. Богомазов А.С. «Векторные системы управления с наблюдателями состояния»;
2. Бондаренко Е.А. «Разработка системы векторного управления асинхронным электроприводом с наблюдателями состояния»;
3. Федюк О.А. «Специальные вопросы расчета асинхронных двигателей».
Суть работы
Важнейшей характеристикой качественной САУ является ее точность отработки и качество переходных процессов. На качество переходных процессов в САУ асинхронным двигателем влияет изменение следующих параметров объекта управления:
1) активное сопротивление обмоток двигателя ( );
);
2) индуктивности обмоток двигателя ( );
);
3) взаимная индуктивность ;
4) момент инерции механизма  ;
;
5) момент статического сопротивления  .
.
Активное сопротивление обмоток статора и ротора двигателя изменяются в результате локального и глобального нагрева двигателя. Изменение магнитного состояния асинхронного двигателя влияет на индуктивность. Момент инерции и момент статической нагрузки изменяются в результате работы технологического оборудования.
Многие ученые занимаются исследованием изменения этих параметров и влиянием их на работу всей САУ. Но до сих пор не существует общих методов определения чувствительности систем управления электроприводом к изменению параметров объекта регулирования.
Возьмем за основу трехфазную математическую модель АД, которая построена на основе уравнений (1), (2), (3), (4), (5), и дополним эти уравнения зависимостями индуктивности контура намагничивания от тока намагничивания (рис.1) и потока намагничивания от тока намагничивания (рис.2).
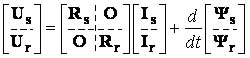 (1)
(1)
где  ,
, ,
, ,
, ,
, ,
, - векторы напряжений, токов и потокосцеплений фаз
- векторы напряжений, токов и потокосцеплений фаз  статора и
статора и  ротора;
ротора;
 - диагональные матрицы активных сопротивлений соответственно фаз статора и ротора, которые приведены к статору;
- диагональные матрицы активных сопротивлений соответственно фаз статора и ротора, которые приведены к статору;
 - нулевая матрица.
- нулевая матрица.
 (2)
(2)
 (3)
(3)
где 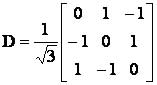 - постоянный матричный коэфициент.
- постоянный матричный коэфициент.
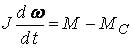 (4)
(4)
 (5)
(5)
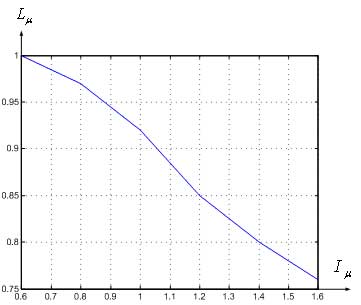
Рисунок 1 – Кривая изменения индуктивности контура намагничивания
Рисунок 2 – Кривая намагничивания (рисунок 397 x 325 пикселей анимирован (12 фр., 5 повторов)).
В результате математического моделирования были получены переходные процессы скорости вращения  и момента
и момента  на валу двигателя, изображенных на рисунке 3 и 4.
на валу двигателя, изображенных на рисунке 3 и 4.
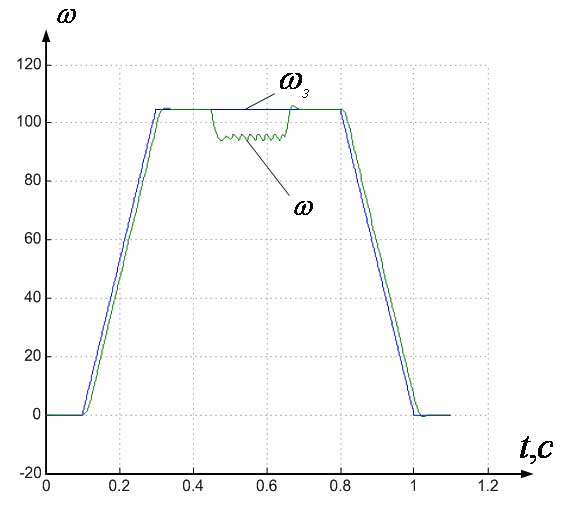
Рисунок 3 – Зависимость угловой скорости АД от времени при изменении взаимной индуктивности
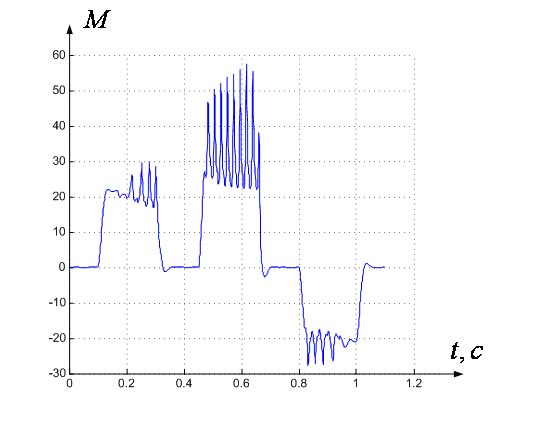
Рисунок 4 – Зависимость момента АД от времени при изменении взаимной индуктивности
Заключительная часть
Полученные и планируемые результаты
В ходе работы проведен обзор литературы, посвященный данной теме:
1. Проанализированы различные системы и методы управления и построения систем автоматического регулирования для учета изменения параметров объекта управления.
2. Создана математическая модель асинхронного двигателя для учета влияния изменения взаимной индуктивности.
Планируется создать модель для учета следующих параметров:
1) активное сопротивление обмоток двигателя ();
2) индуктивности обмоток двигателя ();
3) взаимная индуктивность ;
4) момент инерции механизма ;
5) момент статического сопротивления .
А так же улучшить качество управления, использую новые методы управления.
Заключение и выводы
На данный момент исследования можно сделать следующие выводы:
1. Создана математическая модель для учета изменения взаимной индуктивности;
2. Многие современные методы и системы управления позволяют учесть и адаптировать САУ под изменение отдельных параметров;
3. Исследование систем управления при изменении параметров объекта регулировании позволит улучшить качество переходных процессов и управления в целом.
Литература
1. Р.Т. Шрейнер, В.А. Поляков Статья «Адаптивная система векторного управления асинхронным электроприводом с ориентацией поля ротора» // Электротехника. -1998. -№2. -с.23-29.
2. Виноградов А.Б. Статья «Цифровая релейно-векторная система управления асинхронным электроприводом с улучшенными динамическими характеристиками.» // Электричество. -2003. -№6. -с.43-51.
3. Виноградов А.Б., Чистосердов В.Л., Сибирцев А.Н. Статья «Адаптивная система векторного управления асинхронным электроприводом» // Электротехника. -2003. -№07. -с.7-17.
4. Л.А. Шпиглер, В.А. Войтенко, В.М. Ситниченко, А.Н. Николаенко Статья «Исследование момента асинхронного двигателя в электроприводе с косвенной ориентацией вектора потокосцепления ротора» // Электротехника. -1998. -№2. -с.54-57.
5. Бешта О.С., Воробьев О.А., Балахонцев О.В., Худолий С.С. Статья «Исследование поверхности отклика квадратичного критерия качества для процесса пуска асинхронного двигателя.» // Теоретические вопросы электропривода. -с.62-64.
6. Виноградов А.Б. Статья «Учет потерь в стали, насыщения и поверхностного эффекта при моделировании динамических процессов в частотно-регулируемом асинхронном электроприводе.» // Электротехника.
-2005. -№5. -с.57-61.
7. Книга Шрейнер Раздел 21.5 «Учет вытеснения тока в обмотке ротора» // -2000г. -с.523-529.
8. А.О. Лозинский, Л.Ф. Карплюк, Б.Л. Карплюк Статья «Частотно-регулируемый электропривод со сменным моментом инерции и нагрузки» // Львовская политехника. -2006. –с.46-47.
9. Шиянов А.И., Медведев В.А., Морозов С.В. Статья «Асинхронный электропривод с упругой нагрузкой и адаптивным регулятором» // Электричество. -2001. -№2. -с.47-49.
10. Балахонцев О.В. Дисертація на здобуття наукового ступеня кандидата технічних наук «Ідентифікація параметрів і координат асинхронного електропривода в режимі реального часу» // Дніпропетровськ. -2006. –с.10-35.
ДонНТУ >
Портал магистров ДонНТУ >
Автобиография | Реферат | Библиотека | Ссылки |
Отчет о поиске | Индивидуальное задание
