19. Symposium ASIM 2006, Tagungsband
Virtuelle Simulationsmodelle und ein Devirtualisierungsvorgang für die Entwicklung der parallelen Simulatoren von komplexen dynamischen Systemen
V. Svjatnyj, O. Moldovanova, O. Smagin
Nationale technische Universität Donezk, Fakultät für Rechentechnik und Informatik
Artemstraße 58, 83000 Donezk, Ukraine
M. Resch, R. Keller, R. Rabenseifner
Höchstleistungsrechenzentrum Stuttgart, Nobelstraße 19, 70569 Stuttgart, Deutschland
Abstract
V. Svjatnyj, O. Moldovanova, O. Smagin Virtual Simulation Models and Devirtualisation Process for the Development of Parallel Simulators of Complex Dynamic Systems. This article deals with approaches for virtual parallel LPDS and DPDS simulation models and approaches for development of parallel simulators. The devirtualisation process is defined and is described with examples.
Abb.1. Etappe der Erstellung von DSKP-, DSVP-Simulationsmodelle
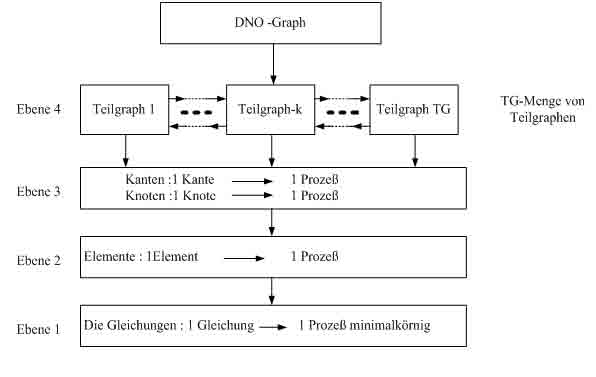
Abb. 2 zeigt vier möglichen Parallelitätsebenen
der dynamischen Netzobjekte (DNO) mit verteilten Parametern [1]. Nach der
Auswahl der numerischen Verfahren werden die
den Parallelisierungsansätzen und den Parallelitätsebenen
zugeordneten virtuellen Simulationsmodelle und deren Blockdiagramme
erstellt.
Abb. 2. Die VPSM-Parallelitatsebene fur DNO-Topologien
Devirtualisierung von virtuellen parallelen Simulationsmodellen
Die
Zielrechnerarchitektur ist die dem Modellentwickler zur Verfügung stehende
lose oder/und eng gekoppelte, nach
MIMD-Prinzip funktionierte, beschränkte heterogene Menge der installierten
vollfunktionellen Prozessoren mit lokalem oder/und gemeinsamem Speicher und
verfügbarem vordefiniertem programmgesteuertem Verbindungsnetzwerk. Als
paralleler Simulator für das betrachtete komplexe dynamische
System wird eine Hardware/Software-Systemorganisation definiert, die den
Modellierungsvorgang und paralleles
virtuelles Simulationsmodell auf Zielrechnerarchitektur sofwaretechnisch
effizient realisiert und den Modellentwicklern sowie den Modellbenutzern eine
benutzerfreundliche Kommunikation mit den Modellierungs- und
Simulationsressourcen erlaubt. Die benötigte
Devirtualisierung von virtuellen parallelen Simulationsmodellen betrifft
deren Umwandlung im Hinblick auf die Simulatorrealisierung mit Hilfe der
vorgegebenen Zielrechnerarchitektur.
Ein Anwendungsbeispiel
Die obige virtuelle Simulationsmodelle und
ihre Devirtualisierung werden anhand der Beispiele aus des Gegenstandsgebiets
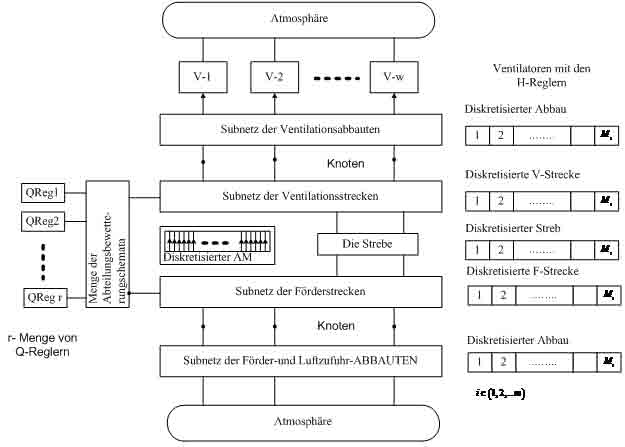
„Grubenbewetterungssysteme“ betrachtet. Abb. 3 illustriert die
Dekomposition und Ortsdiskretisierung des Grubenbewetterungssystems.
Abb.3. Dekomposition und Ortsdiskretisierung des Grubenbewetterungssystems
Die nach der Dekomposition erhaltene DNO-Komponenten haben folgende Eigenschaften,
die wir fur die weitere Parallelisierung in den Betracht nehmen sollen:
Die luft- und
gasdynamische Vorgänge in den Ventilationsabbauten und Ventilationsstrecken, in
den Strebe, Förderstrecken und Luftzufuhrabbauten werden durch eindimensionale
Modelle (partielle Differentialgleichungen) beschrieben. Die
Ortsdiskretisierung nach Linienverfahren führt zur sekundären DNO-Topologien
mit den Graphkanten, die jeweils aus Mi Elementen bestehen (i = 1,2,...,
m). Jede Kante wird mit einem System der
2Mi gewöhnlichen Differenzialgleichungen
(Differenzgleichungen bezüglich der Ortskoordinate) beschrieben. Um die
minimale Körnigkeit der virtuellen Prozessen zu definieren, wurden die
Gleichungssysteme aller in Abb. 3
dargestellten DNO-Komponenten analysiert und zur Betrachtungen folgende
Prozesse eingefüurt:
Nach der Dekomposition und Ortsdiskretisierung des
Bewetterungsnetzes mit m = 117 Kanten und n = 61 Knoten [1] geben diese Arten
von Prozessen insgesamt mehr als 100000 Gleichungen, die das virtuelle
parallele minimalkörnige Simulationsmodell auf erster Parallelitätsebene (Abb.
2) presentieren. Diese Gleichungen werden nach den Angaben des
Topologieanalysators mit dem Gleichungsgenerator automatisch erstellt. Im
Rahmen der problemorientierten parallelen Simulationsumgebung [1] wird den oben
vorgeschlagenen Devirtualisierungsvorgang untersucht. In Betracht nehmen wir
die folgende Zielrechnerarchitekture
[2]: eng gekoppelte MIMD-Systeme mit dem gemeinsamen Adressraum und
OpenMP-Standard der parallelen Programmierung; lose gekoppelte MIMD-Systeme mit
verteiltem Adressraum und MPI-Standard des Nachrichtenaustausches; kombinierte
parallele Rechnersysteme mit dem hybriden parallelen Programmiermodell [3]. Die
Gleichungslösern des parallelen Simulators werden aufgrund der parallelisierten
konventionellen sowie blockartigen numerischen Verfahren entwickelt [1].
Zusammenfassung und Ausblick
Die vorgestellten Ergebnisse liefern einen Beitrag für rechnergestü
tzteErstellung von Modellen, Simulationsmodellen und Simulatoren der dynamischen
Systeme mit konzentrierten und verteilten Parametern, für die
simulationstechnisch effiziente Nutzung der parallelen Ressourcen sowie für die
Erhöhung der Benutzerfreundlichkeit von parallelen Simulationsumgebungen. Die
vorgeschlagene virtuelle parallele Simulationsmodelle und
Devirtualisierungsvorgänge werden in der
Zusammenarbeit mit dem Höchstleistungsrechenzentrum Stuttgart (HLRS)
implementiert und untersucht.
Literatur
Einführung
Eine Implementierung von
mathematischen Modellen für komplexe dynamische Systeme mit konzentrierten
(DSKP) und mit verteilten (DSVP) Parametern
auf modernen parallelen Rechnerarchitekturen gehört zu den aktuellen
Forschungsproblemen der parallelen Simulationstechnik. Die Entwicklung von
parallelen DSKP- und DSVP-Simulatoren für verschiedene Anwendungsfelder stehen
im Mittelpunkt einer engen Kooperation zwischen der DonNTU und dem HLRS auf dem
Gebiet von verteilten parallelen Simulationsumgebungen [1].
In dem Beitrag werden Ansätze für virtuelle
parallele DSKP- und DSVP-Simulationsmodelle und zur Entwicklung von parallelen Simulatorenbetrachtet.
Insbesondere wirdDevirtualisierungsvorgang definiert und anhand vonBeispielen erläutert.
Die DSKP-, DSVP-Simulationsmodelle
Die formale DSKP- und
DSVP-Modellierung in verschiedenen Anwendungsfeldern umfasst als wesentlichen Komponenten die
Beschreibung der Topologie und des dynamischen Prozessverhaltens mit Hilfe von
partiellen und gewöhnlichen differential-algebraischen Gleichungssystemen.Die
DSKP- und DSVP-Simulationsmodelle werden als örtlich diskretisiertes und zur numerischen Lösung geeignet
umgewandeltes Gleichungssystem
definiert. Infolge der örtlichen
Diskretisierung ensteht eine sekundäre Topologie, die in der Modellumwandlung
eine wichtige Rolle spielt und im Gleichungsgenerator berücksichtigt wird.
Die DSKP- und DSVP-Modellierung ist ein Vorgang, der die Etappen
der rechnergestützten
Erstellung von Modellen und Simulationsmodellen sowie ihre Implementierung
umfasst. Diese Etappen werden für die Topologien von verfahrenstechnischen
Fließbildern, automatisierungs-technischen Strukturen und dynamischen
Netzobjekten in Abb.1 dargestellt. Dabei
wird vorausgesetzt, dass dem Modellentwickler in dem jeweiligen
Anwendungsfeld eine hochentwickelte
Benutzeroberfläche (BOF), ein Topologieanalysator sowie ein
Gleichungsgeneratoren zur Verfügung stehen.
Die virtuelle parallele DSKP-, DSVP-Simulationsmodelle
Virtuelle parallele DSKP-
und DSVP-Simulationsmodelle (VPSM)
bilden eine Abstraktion, die aus dem vorverarbeiteten Gleichungssystem und der
mit dem Parallelisierungsansatz erstellten Struktur von virtuellen MIMD-Prozessen
besteht. Ein virtueller MIMD-Prozess ist ein weitgehend autonomes Programm, das dem
Lösungsalgorithmus des Gleichungsteilsysteme entspricht und über eine
Schnittstelle mit den benachbarten Prozessen kommuniziert. Die durch einen
Kommunikationsgraphen dargestellte logische Verbindungen zwischen den
virtuellen MIMD-Prozessen stellen ein virtuelles
Verbindungsnetzwerk dar. Die minimale Körnigkeit
der virtuellen Prozesse (VP) charakterisiert den Umfang der
Prozess-Berechnungsarbeiten und die VP-Menge. Sie ist von der Dekomposition der
Topologie und Modellgleichungen sowie
der örtlichen DSVP-Approximation abhängig. Bei der Dekomposition und
Approximation entstehen Teilsysteme, deren nicht zerlegbare Elementen
diskretisiert werden. Deshalb wird vorgeschlagen, die
minimale Körnigkeit der virtuellen Prozessen
entsprechend der bei der Dekomposition und Diskretisierung hergeleitete Simulationsgleichungen zu definieren.
Die mit der minimalen
VP-Körnigkeit verbundenen Ansätze zur DSKP- und DSVP-Parallelisierung führen
auf die Parallelitätsebenen der virtuellen parallelen Simulationsmodelle.

Hierzu werden die einzelnen Entwicklungsetappen
des Devirtualisierungsvorgang auf
parallelen DSKP- und DSVP-Simulatoren vorgeschlagen. Ausgangspunkt der
Entwicklung ist eine detaillierte Darstellung der parallelen virtuellen
Simulationsmodelle und Parallelitätsebenen. Die weitere Schritte sind die
Apriori-Analyse und eine
Optimierung der Lastverteilung zwischen den virtuellen Prozessen unter
Berücksichtigung der Datenaustauschoperationen im Vergleich zu dem
Umfang der Rechenoperationen.
Dabei
werden die zur Implementierung geeigneten optimierten virtuellen
Simulationsmodelle ausgewählt und deren
Kommunikationsgraphen definiert.
Außerdem werden die Struktur und das Blockdiagramm der devirtualisierten
parallelen Simulationsmodelle mit den Parametern die Simulation der
jeweiligen DSKP- und DSVP-Systeme
befüllt. Schließlich werden die Implementierung und das Debugging des
parallelen DSKP- und DSVP-Simulators untersucht.