
В настоящее время синхронные двигатели являются наиболее перспективными с точки зрения развития управляемых электроприводов. Они имеют ряд преимуществ перед двигателями постоянного тока и асинхронными двигателями. Уже сейчас имеются разработки бесконтактных синхронных машин, обладающих улучшенными на порядок массо-габаритными показателями [1-3].
Синхронные двигатели характеризуются разнообразием конструкций и принципов построения систем автоматического управления для них.
Синхронные машины имеют сложное математическое описание, которое представляет собой систему дифференциальных уравнений. Поэтому при разработке математических моделей могут быть допущены ошибки. Для моделирования переходных процессов можно использовать пакет Matlab с приложением Simulink, где в библиотеке Powerlib приведены готовые модели синхронных машин в виде отдельных блоков (рис. 1). Однако из-за несоответствия терминологии и отсутствия детализированных схем этих блоков могут возникнуть определенные трудности в определении параметров, необходимых при моделировании.
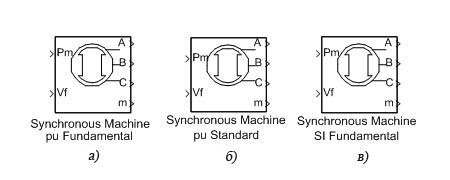
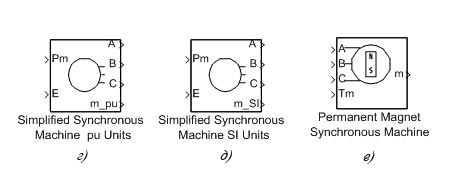
Рисунок 1 – Блоки синхронных машин, представленные в Powerlib
Исследованию и моделированию синхронных посвящено множество работ. Однако использованию при этом пакета Simulink, а особенно готовых блоков из библиотеки SimPowerSystems уделено мало внимания. По этой теме можно выделить книгу И. В. Черных «SimPowerSystems: Моделирование электротехнических устройств и систем в Simulink». Черных Илья Викторович - д.т.н., профессор кафедры техники высоких напряжений Уральского государственного технического университета - УПИ. Область научных интересов: линейный асинхронный электропривод, преобразовательная техника, индукционный нагрев. Ведущий раздела "Simulink" консультационного центра Matlab компании Softline. matlab.exponenta.ru/simulink
Цель работы: выяыление соответствия между моделями, разработаными по известному математическому описанию и Powerlib-моделями и разработка рекомендаций по их применению.
Для этого необходимо решить следующие задачи:
• разработать собственные модели синхронных машин по известному математическому описанию Simulink;
• сравнить их с Powerlib-моделями;
• сделать соответствующие выводы и разработать рекомендации.
В последующем результаты данной работы могут быть использованы при синтезе систем автоматического управления синхронными двигателями.
Ознакомление с документацией, сопровождающей пакет Simulink, исследование приведенных моделей позволили прийти к следующим выводам.
Блоки Synchronous Machine (рис. 1 а, б, в) моделируют синхронные машины с демпферний обмоткой (в первые два блока вводятся параметры в относительных единицах (о.е.) – pu Units, во второй – параметры в единицах системы СИ (а.е.) – SI Units). С помощью блоков Simplified Synchronous Machine (рис. 1 г, д) можно промоделировать неявнополюсные синхронные машины без демпферной обмотки (также в о.е. и в а. е. соответственно). Блок Permanent Magnet Synchronous Machine (рис. 1 е) моделирует синхронный двигатель с постоянными магнитами в а.е.
Рассмотрим подробнее блок Synchronous Machine SI Fundamental.
Блок Synchronous Machine SI FundamentalЯвляется моделью классической синхронной машины с демпферной обмоткой. Модель выполнена в трех вариантах Synchronous Machine SI Fundamental (параметры машины задаются в системе единиц Си), Synchronous Machine pu Fundamental (параметры машины задаются в системе относительных единиц) и Synchronous Machine pu Standard (используются параметры схемы замещения машины в относительных единицах). В зависимости от варианта, входные и выходные переменные машины также измеряются в системе единиц Си или в относительных единицах.
Для удобства извлечения переменных машины из выходного вектора измеряемых переменных в библиотеке SimPowerSystems предусмотрен блок Machines Measurement Demux.
Сигнал равный механической мощности на валу машины подается на входной порт Pm, а на входной порт Vf сигнал, задающий напряжение обмотки возбуждения.
Схема замещения синхронной машины в системе координат связанной с ротором (q-d оси), использованная при создании модели показана на рис. 3
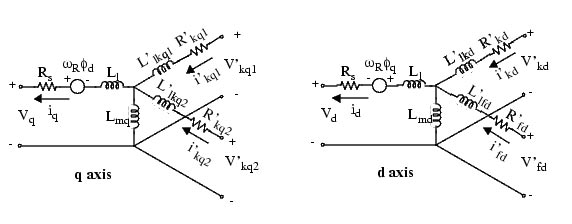
Рисунок 2 – Схема замещения синхронной машины в системе координат, связанной с ротором (q-d).
Все параметры ротора и его переменные приведены к статору. Индексы переменных и параметров обозначают следующее:
Рисунок 3 – Окно ввода параметров блока Synchronous Machine SI Fundamental.
Параметры блока:
Rotor type:
[Тип ротора]. Выбирается из списка:
· Salient-pole - явнополюсный ротор,
· Round - неявнополюсный ротор.
Nom. power, volt., freq. and field cur. [ Pn(VA) Vn(Vrms) fn(Hz) ifn(A) ]:
[Номинальные полная мощность Pn (ВА), действующее линейное напряжение Vn (В), частота fn (Гц), ток возбуждения ifn (А)].
Stator [ Rs(ohm) Ll,Lmd,Lmq(H) ]:
[Параметры статора: активное сопротивление Rs (Ом), индуктивность рассеяния Ll (Гн), индуктивность по продольной оси Lmd (Гн), индуктивность по поперечной оси Lmq (Гн)].
|Field [ Rf'(ohm) Llfd'(H) ]:
[Приведенные параметры обмотки возбуждения ротора: сопротивление Rf'(Ом) и индуктивность Llfd'(Гн) ].
Dampers [ Rkd',Llkd' Rkq1',Llkq1' Rkq2',Llkq2' " ] (R=ohm,L=H):
[Приведенные параметры демпферной обмотки: сопротивление (Ом) и индуктивность (Гн) по продольной м поперечной осям ].
Inertia, friction factor and pole pairs [ J(kg.m^2) F(N.m.s) p() ]:
[Момент инерции J (кг*м^2), коэффициент трения F (Н*м*с) и число пар полюсов p].
Init. cond. [ dw(%) th(deg) ia,ib,ic(A) pha,phb,phc(deg) Vf(V) ]:
[Начальные условия]. Параметр задается в виде вектора каждый элемент которого имеет следующие значения:
· dw(%) - отклонение скорости (в %),
· th(deg) - угловое положение ротора (град.),
· ia, ib, ic - начальные значения токов статора (А),
· phA, phB, phC - начальные фазы токов статора (град.),
· Vf - напряжение обмотки возбуждения (В).
Simulate saturation
[Моделировать насыщение]. При установленном флажке появляется дополнительное поле Saturation parameters.
Saturation parameters [ ifd1,ifd2,... (A) ; vt1,vt2,... (VLL rms) ]:
[Характеристика насыщения]. Параметр задается в виде матрицы задающей характеристику холостого хода. Первая строка матрицы содержит значения тока возбуждения (А), а вторая значения выходного напряжения (В).
Display Vfd which produces nominal Vt
[Отобразить значение напряжения обмотки возбуждения Vfd(В) при котором выходное напряжение Vt(В) будет номинальным].
Для варианта модели синхронной машины Synchronous Machine pu Standard вместо параметров статорной, роторной и обмотки возбуждения задаются реактивные сопротивления машины и постоянные времени по продольной и поперечной осям:
Заключение
В дальнейшем будет детально будут рассмотрены приведенный выше блок и другие блоки библиотеки и сравнены с собственными моделями. Будет оценено соответствие результатов моделирования синхронных машин и сделаны соответствующие выводы.
Рисунок 4 – Пуск синхронного двигателя.
(Pисунок анимированый: 11.9 кВ, 8 кадров, 6 циклов, Easy GIF Animator).
Литература
1. Электроприводы переменного тока с частотным регулированием: учебник для студ. высш. учеб. зав. /Г. Г. Cоколовский. – М.: Издательский дом «Академия», 2006. – 272 с.>
2. Моделювння електромеханічних систем: Підручник / Чорний О.П., Луговой А.В., Родькін Д.Й., Сисюк Г.Ю., Садовой О.В. – Кременчук, 2001. – 410 с.
3. Башарин А. в., Новиков В. А., Соколовский Г. Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат., 1982 – 392с.
4. Справочник по электрическим машинам: В 2 т./ Под общ. ред. И. П. Копылова. Т. 1. – М.: Энергоатомиздат, 1988. – 456 с.
5. Китаев В. Е., Корхов Ю. М., Свирин В. К. Электрические машины. Ч. II. Машины переменного тока: Учебное пособие для техникумов/ Под ред В. Е. Китаева. – М.: ВЫсшая школа, 1978. – 184 с.