|
|
|


Автореферат
Содержание
- Используемые сокращения.
- Введение.
- Магнитное подвешивание как альтернатива колеса в системах ВСНТ.
- Магнитный подвес экипажей.
- Структурная схема системы управления электромагнитным подвесом ВСНТ.
- Краткое описание работы.
- Анализ полученных результатов.
- Заключение.
- Список использованной литературы.
Используемые сокращения.
ВСНТ – высокоскоростной наземный транспорт;
НДС – непрерывная динамическая система;
ДДС – дискретная динамическая система;
МП – магнитный подвес;
ЭМ – электромагнит;
ЭМП – электромагнитный подвес;
ЭДП – электродинамический подвес;
ППМ – подвес на постоянных магнитах;
КМП – комбинированный магнитный подвес;
ФР – феррорельс;
СУ – система управления;
СИЭМ – силовой исполнительный элемент;
ЛД – линейный двигатель;
ППП – пакет прикладных программ.
Введение.
Транспорт - это огромная индустрия, и эту индустрию в XXI веке ожидают большие перемены, связанные с тремя основными
факторами.
Во-первых, на планете происходит изменение ситуации, связанное с проблемой энергетических ресурсов. Современный транспорт
почти полностью зависит от нефти, запасы которой быстро истощаются, и в конце концов наступит время, когда она станет
недоступной для использования на транспорте. Различные способы повышения эффективности использования нефти могут отодвинуть,
но не предотвратить наступление этого времени. Транспортная система будущего должна быть "всеядной": в начале развития она
может работать на относительно дешевом нефтяном топливе, затем должна быть электрифицирована, либо переведена на
альтернативные виды топлива или другие источники энергии без дополнительных значительных затрат.
Вторым фактором, диктующим необходимость перемен, является современное состояние самой мировой транспортной системы,
основные стандарты которой, например, железнодорожная колея, были заложены ещё в XIX веке. Система является устаревшей,
а некоторые её элементы устарели уже давно, так как в неё вносились лишь небольшие и малосущественные изменения, не
затрагивающие основ системы.
В-третьих, в XXI веке ещё острее встает глобальные проблемы экологии и безопасности, так как транспорт, из-за масштабности
своего использования, стал наиболее опасным изобретением человечества.
Система автодорожного сообщения во многих странах характеризуется высокой интенсивностью движения, наличием огромного
парка грузовых и пассажирских автомобилей, дальнейшим ростом их выпуска. Существенными недостатками автотранспорта являются
большой удельный расход дефицитного жидкого топлива, значительное загрязнение окружающей среды, сложность организации
движения.
Воздушный транспорт, получающий все большее развитие, также не лишен существенных недостатков. Следует отметить такие
негативные обстоятельства, как сравнительно низкая вместимость летательных аппаратов, ограниченность транспортной
плотности, обусловленной емкостью воздушного пространства, нерентабельность сообщений на расстояниях ниже определенного
предела, высокая потребность дефицитного горючего при низкой эффективности использования энергии, существенное загрязнение
окружающей среды и обременение населения шумом.
Таким образом, возникает острая необходимость в появлении новой транспортной системы, основанной на новых технологиях и
новых стандартах, способных привести к радикальным изменениям в способах транспортировки.
Будущая транспортная система для перевозки пассажиров, мало- и крупнотоннажных грузов должна удовлетворять многим
противоречивым требованиям:
- высокая пропускная способность при малой площади занимаемой земли и низких затратах на содержание и ремонт путей сообщения;
- минимальное негативное воздействие на окружающую среду при сохранении большого суточного пробега транспортного средства;
- высокая средняя скорость движения при снижении расхода топлива и числа дорожно-транспортных происшествий;
- путь движения должен быть пригоден для движения и маневрирования общественного и индивидуального транспорта.
Транспортной системой, удовлетворяющей требованиям XXI века, может стать принципиально новый высокоскоростной наземный
транспорт (ВСНТ) с магнитным подвешиванием (МП) экипажей и бесконтактной передачей тягового усилия благодаря
электромагнитному взаимодействию элементов линейных электродвигателей получивший название «Маглев».
К содержанию
Магнитное подвешивание как альтернатива колеса в системах ВСНТ.
Магнитное подвешивание (МП) в системах ВСНТ явилось альтернативой колеса. Известны системы МП четырех типов:
электромагнитное (ЭМП), электродинамическое (ЭДП), с помощью постоянных магнитов (ППМ) и различные варианты
комбинированного подвешивания (КМП). Общим для них является использование механических сил в магнитных полях для
осуществления бесконтактного подвешивания (левитации) экипажей.
Одной из наиболее сложных задач, которые необходимо решить при создании систем ВСНТ с электромагнитным подвешиванием (ЭМП),
является проблема управления экипажем в пространстве с помощью автоматической системы регулирования зазора между полюсами
электромагнита и феррорельсами.
Актуальность проблемы управления состоит в том, что для обеспечения устойчивости ЭМП экипажа ВСНТ используют различные
комбинации сигналов обратных связей по зазору, скорости и ускорению изменения зазора и другие, т.е. нет единого подхода к
обеспечению устойчивости, поэтому предоставлена возможность для широкого проведения научных исследований.
Наибольшее развитие получило ЭМП, структурная схема которого показана на рис. 1. Левитация и направление экипажа
относительно неподвижной ферромагнитной путевой направляющей 1, или феррорельса (ФР), здесь осуществляются с помощью сил
притяжения его электромагнитов (ЭМ) 2, обмотки возбуждения которых питаются током от быстродействующей системы управления
(СУ) 3 по сигналам датчиков 4, контролирующих зазор между ЭМ и ФР, равный примерно 15 мм.
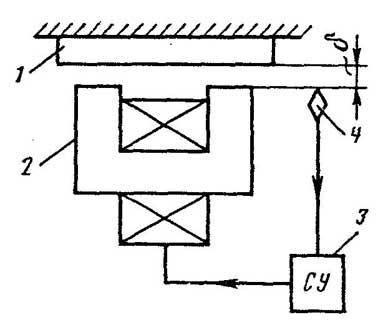
Рисунок 1 – Структурная схема ЭМП:
1 – феррорельс (ФР); 2 – силовой исполнительный элемент (СИЭМ);
3 – система управления; 4 – датчик зазора между ФР и СИЭМ.
В результате теоретических и экспериментальных исследований различных вариантов для системы линейного электропривода и
магнитного подвеса уже было разработано несколько различных видов силовых устройств, представленных на рис.2.
Рисунок 2 - Примеры силовых устройств систем линейного привода и магнитного подвеса:
а) Асинхронный тягово-подъемный модуль (АТПМ);
б) Устройство тяги и подвеса экипажа HSST (Япония).
(Анимация - 2 кадра с интервалом 2 секунды, цикличность 10 циклов, создана в программе MP Gif Animator, объем - 27,1 Кб)
К содержанию
Магнитный подвес экипажей.
Система электромагнитного подвеса основана на эффекте магнитного притяжения электромагнита
к феррорельсу. Сила притяжения к ФР, которая называется подъемной Fп, должна уравновешивать
все нагрузки Fэ, действующие на экипаж, в том числе и силу веса экипажа.
При движении ЭМ вдоль ФР в них наводятся вихревые токи, создающие магнитный поток, размагничивающий основной магнитный
поток. Возникающая при этом сила Fв может быть разложена на тормозную Fт, направленную против движения экипажа, и
отталкивающую силу Fот, направленную против силы Fп. С ростом скорости движения экипажа влияние вихревых токов может
достигнуть существенной величины и поэтому должно учитываться при расчете и конструировании ЭМ и ФР. Диаграмма
взаимодействия сил в системе ЭМП показана на рис. (3, а) при неподвижном экипаже, а на рис. (3, б) при движении.
Компенсация отталкивающей силы Fот осуществляется автоматически системой управления МП путем соответствующего увеличения
тока в обмотке ЭМ, а тормозной силы Fт – соответствующим увеличением тягового усилия линейного двигателя.
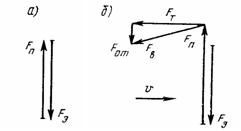
Рисунок 3 – Диаграмма взаимодействия сил ЭМП.
Для удержания экипажа над путевой структурой в общем случае необходимы две стабилизирующие системы: в вертикальной и
горизонтальной плоскостях. Наиболее просто это достигается применением двух независимых систем ЭМП. Одна из них
осуществляет магнитное подвешивание экипажа в вертикальной плоскости, а другая является направляющей. Принципиальная
конструктивная схема такого экипажа показана на рис. 4.
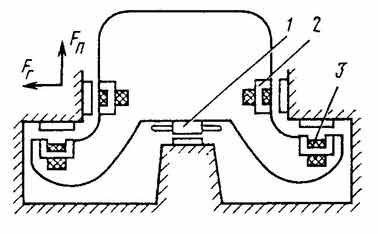
Рисунок 4 – Конструктивная схема экипажа с раздельной системой подвеса и направления:
1 – ЛД; 2 – ЭМ направления; 3 – ЭМ подвеса.
К содержанию
Структурная схема системы управления электромагнитным подвесом ВСНТ.
В данной работе используется довольно распространенная структурная схема системы управления электромагнитным подвесом ВСНТ.
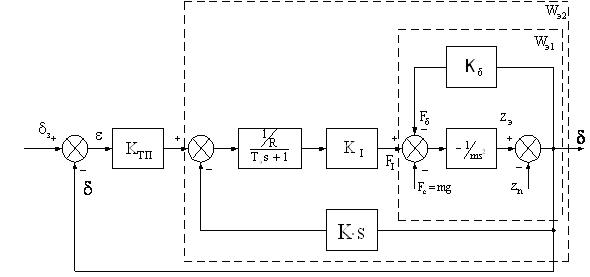
Рисунок 5 – Структурная схема системы автоматического регулирования зазора
На рис. 5 введены следующие обозначения:
 – воздушный зазор между полюсами электромагнитов и феррорельсом; – воздушный зазор между полюсами электромагнитов и феррорельсом;
 – сигнал рассогласования; – сигнал рассогласования;
 – координата электромагнита; – координата электромагнита;
 – координата пути; – координата пути;
Тэ – постоянная времени электромагнита (ЭМ);
R – сопротивление ЭМ;
m – масса экипажа;
Kтп – коэффициент усиления вентильного преобразователя;
 – коэффициенты передачи соответственно от тока и зазора к силе; – коэффициенты передачи соответственно от тока и зазора к силе;
K – коэффициент передачи от скорости изменения зазора к ЭДС индукции.
К содержанию
Краткое описание работы.
Постановкой задачи к работе является проектирование и синтез регулятора автоматического управления зазором МП, с целью
стабилизации вагона ВСНТ над путевой структурой и максимизации комфортабельности передвижения для пассажиров.
С использованием вышепредложенной структурной схемы в работе определяется передаточная функция исследуемой системы, на ее
основе строится система дифференциальных уравнений, описывающая поведение системы и выполняется представление системы в
пространстве состояний.
Далее был произведен синтез модального регулятора для системы автоматического управления, с предварительным преобразованием
нашей непрерывной динамической системы (НДС) в дискретную (ДДС). Синтез модального регулятора производится по методу
Аккермана на основе выбора желаемого расположения полюсов замкнутой системы.
После получения вектора коэффициентов обратной связи модального регулятора по методу Аккермана, производится синтез
наблюдателя состояния пониженного порядка для исследуемой системы. Получив коэффициенты обратной связи наблюдателя
пониженного порядка производится синтез динамического регулятора, с использованием полученных коэффициентов обратной связи
модального регулятора и наблюдателя пониженного порядка.
Рисунок 6 - Графики переходных процессов системы с динамическим регулятором.
1 - Обработка единичного ступенчатого воздействия.
2 - Реакция системы при изменении параметра Тэ.
3 - Реакция системы на изменение параметров Kтп и KI.
4 - Реакция системы на изменение параметра К.
(Анимация - 4 кадра, интервал 2 секунды, цикличность - 10 циклов, создано в программе MP Gif Animator, объем 157 Кб)
Далее производится исследование оптимального управления системой ЭМП ВСНТ, для чего производится синтез оптимального
регулятора для ДДС управления ЭМП на основе второго метода Ляпунова.
К содержанию
Анализ полученных результатов.
При анализе переходных характеристик, полученных при виртуальном синтезе динамического и оптимального регуляторов с
использованием пакета прикладных программ MatLab, можно сделать выводы, что в системе с динамическим регулятором наблюдается
перерегулирование. Это является негативным фактором, влияющим на комфорт поездки в вагоне ВСНТ. Оптимальный регулятор в свою
очередь позволяет добиться полного отсутствия перерегулирования, однако быстродействие такого регулятора по сравнению с
динамическим значительно уменьшается.
Рисунок 6 - Графики переходных процессов системы с оптимальным регулятором.
1 - Обработка единичного ступенчатого воздействия.
2 - Реакция системы при изменении параметра Тэ.
3 - Реакция системы на изменение параметров Kтп.
4 - Реакция системы на изменение параметров KI.
5 - Реакция системы на изменение параметра К.
(Анимация - 5 кадров, интервал 2 секунды, цикличность - 10 циклов, создано в программе MP Gif Animator, объем 233 Кб)
Следует заметить, что матрица модального регулятора не однозначна для данной системы и в основном зависит от желаемого
положения выбранных полюсов замкнутой системы (которые определяют быстродействие). Выбор желаемых полюсов замкнутой системы
или желаемого характеристического уравнения – компромисс между быстротой реакции вектора ошибки и чувствительностью к шумам
и помехам. То есть, если мы увеличиваем быстродействие ответа ошибки, влияние помех и шумов увеличивается. Поэтому
исследуются отдельные матрицы обратной связи, образованные из различных желаемых характеристических уравнений и выбирают
ту, которая обеспечивает лучшую эффективность системы.
На основании полученных результатов можно сделать вывод, что для данной системы предпочтительнее использовать оптимальный
регулятор для обеспечения большей комфортабельности перевозок, но если за основу принимается быстродействие в ущерб комфорта,
то лучше использовать динамический регулятор.
К содержанию
Заключение.
В ходе работы была исследована система автоматического управления зазором магнитного подвеса высокоскоростного наземного
транспорта. Были изучены проблемы и перспективы развития и совершенствования транспортной системы. Изучены плюсы и минусы
внедрения в мировую транспортную систему ВСНТ.
Также были получены уравнения состояния и уравнение выхода динамической системы электромагнитного подвеса в непрерывной и
дискретной форме. Решена задача синтеза динамического регулятора на основе желаемого размещения полюсов замкнутой системы
с использованием метода Аккермана.
Произведен синтез алгоритма оптимального управления по квадратичному критерию качества вторым методом Ляпунова и получено
решение матричного уравнения Риккати. Приведены выражения для минимального значения критерия оптимальности и алгоритма
оптимального управляющего воздействия, доставляющего минимум заданному критерию качества.
Проведено экспериментальное моделирование исследуемой ДДС с получением переходных процессов в номинальном и возмущенном режимах работы.
Полученные экспериментальные результаты полностью подтвердили основные теоретические положения данной работы.
Т.к. работа по магистерскому проекту еще не закончена, предполагается в будущем произвести синтез и исследование робастной
системы управления ЭМП ВСНТ, а также провести сравнительный анализ всех исследуемых систем автоматического управления ЭМП
ВСНТ, с целью определения наиболее эффективного регулятора.
Также следует отметить что исследуемая проблема весьма актуальна в свете современной гонки за новыми видами топлива и
ограниченности ресурсов. Система ВСНТ с МП показывает себя как принципиально новый экономный, а главное экологически чистый
вид транспорта, что тоже весьма важно.
К содержанию
Список использованной литературы.
Бочаров В.И., Винокуров В.А., Исаков И.П. Проблемы транспортной экономики и энергетики, пути их решения. В кн.
Высокоскоростной наземный транспорт с линейным приводом и магнитным подвесом. Под ред. В.И. Бочарова и В.Д. Нагорского. –
М.: Транспорт, 1985. 273 с. Бочаров В.И., Васюков О.Н. Системы наземного транспорта с магнитным подвесом и линейными тяговыми электродвигателями.
В кн. Высокоскоростной наземный транспорт с линейным приводом и магнитным подвесом. Под ред. В.И. Бочарова и В.Д. Нагорского.
– М.: Транспорт, 1985. 273 с. Режко Н.А. Системы управления электромагнитным подвесом. В кн. Высокоскоростной наземный транспорт с линейным
приводом и магнитным подвесом. Под ред. В.И. Бочарова и В.Д. Нагорского. – М.: Транспорт, 1985. 273 с. Katsuhiko Ogata. Designing Linear Control System With MATLAB. Prntice – Hall, I no Engliwood Cliffs № I07632. – 1994 – 226 p. Медведев В.С., Потемкин В.Г. Control System Toolbox. MATLAB 5 для студентов/ Под общ. ред. к.т.н. В.Г. Потемкина. – М.: ДИАЛОГ –
МИФИ, 1999 – 278 с. (Пакеты прикладных программ). Режко Н.А., Савина М.М. Методика оптимизации электромагнитного подвеса. Известия ВУЗов. “Электромеханика” №11, 1975. с. 1004 – 1009. Афанасьев В.Н., Колмановский В.Б., Носов В.Р. Математическая теория конструирования систем управления: Учеб. Пособие для втузов. – М.: Высш. шк., 1989.– 447 с. Руш Н., Абето П., Лалуа М. Прямой метод Ляпунова в теории устойчивости/ Пер. с англ., М.: Мир, 1980. – 300 с. Построение функций Ляпунова/Валеев К.Г., Финин Г.С. – Киев: Наук. Думка. 1981. – 412с.
К содержанию
|




