|
|
|


СИНТЕЗ РОБАСТНЫХ СИСТЕМ УПРАВЛЕНИЯ В УСЛОВИЯХ ПАРАМЕТРИЧЕСКОЙ НЕОПРЕДЕЛЕННОСТИ И НАЛИЧИИ НЕКОНТРОЛИРУЕМЫХ ВНЕШНИХ ВОЗМУЩЕНИЙ
Марьенков В.С., группа СУА – 07см
Руководитель доц. Рафиков Г.Ш.
Статья готовится к публикации
Как известно, классические методы синтеза систем автоматического управления в большинстве своем подразумевают знание точных значений параметров объекта управления и внешних воздействий. Однако в современной теории автоматического управления одним из основных направлений стало решение задач синтеза систем, включающих в себя различного рода неопределенности, но при этом, удовлетворяющих заданным параметрам качества. Исследование и синтез таких систем проводятся в рамках теории адаптивного и робастного управления.
Существует множество методов синтеза подобных систем, разработанных как отечественными [1, 2], так и зарубежными [3, 4] авторами. В данной работе рассматривается еще один возможный подход к синтезу робастных систем управления на основе принципа гарантируемой динамики [5, 6]. Этот принцип предлагает синтез робастных систем управления для объектов, имеющих параметрические неопределенности при наличии неконтролируемых внешних возмущений в описании математической модели.
Рассмотрим классический вариант объекта управления в виде линейного стационарного векторного уравнения при наличии внешних возмущений

где А – вещественная матрица параметров системы размерностью nxn; В – матрица управляющих воздействий размерностью nxm; М – матрица размерностью nxr; х(t) – n-мерный вектор состояния объекта; u(t) – m-мерный вектор управления;  – r-мерный вектор внешних неконтролируемых возмущений, удовлетворяющих условиям – r-мерный вектор внешних неконтролируемых возмущений, удовлетворяющих условиям

где  – известные положительные числа. – известные положительные числа.
Предполагается, что в описании объекта существуют параметрические неопределенности, то есть матрицы А={aij} и B={bij} объекта управления точно неизвестны:

где  , ,  – матрицы объекта, соответственно размерностью nxn и размерностью nxm, составленные из номинальных значений – матрицы объекта, соответственно размерностью nxn и размерностью nxm, составленные из номинальных значений  элементов А и номинальных значений элементов А и номинальных значений  элементов B; элементов B;  - соответствующие матрицы неопределенностей, где интервалы неопределенностей известны - соответствующие матрицы неопределенностей, где интервалы неопределенностей известны
Где  – положительные числовые значения, определяющие границы изменения параметрических возмущений – положительные числовые значения, определяющие границы изменения параметрических возмущений  . .
С учетом неопределенностей можем переписать уравнение объекта:

Согласно требованиям, предъявляемым к синтезируемой системе выбирают положительные функции  , с помощью которых задаются границы допустимых областей Xi(t). Требования, предъявляемые к качеству синтезируемой системы, определяются переходными процессами , с помощью которых задаются границы допустимых областей Xi(t). Требования, предъявляемые к качеству синтезируемой системы, определяются переходными процессами

Пусть объект обладает свойством управляемости, а вектор состояния x(t) доступен для измерения. Закон управления для рассматриваемого объекта ищем в виде линейной обратной связи:

где К – матрица размерностью mxn искомого регулятора:
Из строк kj матрицы К составим вектор  , имеющий размерность r=mx1. , имеющий размерность r=mx1.
Задача синтеза робастной системы управления для линейного объекта формулируется в следующем виде:
Найти вектор-параметр p (элементы К) регулятора, обеспечивающий выполнение целевых соотношений при наличии параметрических неопределенностей и влиянии внешних возмущений, т.е. определить область  , где подмножество допустимых параметров , где подмножество допустимых параметров

Для синтеза системы управления с заданными показателями качества используем теорему изложенную и доказанную в [5]. Предположим, что х(tо) X(tо), тогда для того чтобы х(t)X(t) достаточно, чтобы для каждого момента времени t[tо, tk] выполнялось соотношение X(tо), тогда для того чтобы х(t)X(t) достаточно, чтобы для каждого момента времени t[tо, tk] выполнялось соотношение

Перепишем уравнение объекта с учетом закона управления в координатной форме:

Рассмотрим предельные случаи попадания процессов хi(t) на нижнюю и верхнюю границы соответствующих допустимых областей Xi(t). Результатом подстановки значений хi(t) = и хi(t) = -, будут два идентичных выражения отличающихся только знаком, следовательно, можно сделать вывод, что полученные выражения эквивалентны соотношению:

Где 
 - диагональные элементы. - диагональные элементы.
Более детально все преобразования описываются в работе [6].
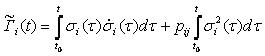
Пусть:

Тогда:

Определив:

Можем записать:

Таким образом, задача синтеза робастной системы управления сводится к определению области допустимых параметров регулятора

Соотношение гарантирует принадлежность переходных процессов к заданным допустимым множествам, что в свою очередь гарантирует не только устойчивость синтезированной робастной системы, но и выполнение инженерных требований к качеству системы.
Перечень ссылок.
Юркевич В.Д. Синтез нелинейных нестационарных систем управления с разнотемповыми процессами., СПб.: Наука, 2000. – 288с. Буков В.Н., Сельвесюк Н.И. Аналитический синтез робастных регуляторов на основе параметризации уравнения Лурье-Риккати. // Автоматика и телемеханика. – 2007. – №2. – с. 6-16 Дорф Р., Бишоп Р. Современные системы управления: Пер. с англ., М.: Лаборатория базовых знаний, 2002. – 832 с. Glover K., MacFarline D. Robust Controller Design Using Normalised Coprime Factor Plant Descriptions // LNCIS. Vol. 138. – NY: SpringerVerlag, 1990. Оморов Т.Т., Шаршеналиев Ж.Ш. Управление многомерными объектами на основе концепции допустимости. Бишкек «Илим», 1996. – 160 с. Кушакова С.Е., Оморов Т.Т. К задаче синтеза робастных систем, МКО-10, 2002, - с.142-149
В начало
|


