Введение. Увеличение степени автоматизации и автономности промышленного производства в сочетании с использованием микропроцессорной техники привело к широкому использованию систем автоматического управления. В настоящее время во многих отраслях производства прослеживаются тенденции, с одной стороны, к производству новых, уникальных и инновационных продуктов, с другой стороны, – к сокращению времени их проектирования. Это является необходимым условием достижения успеха на глобализованном рынке товаров. Вместе с тем особенности микропроцессорных средств, возросшая сложность аппаратных и программных компонентов ставят перед производителями новые задачи повышения надежности отладки и тестирования автономных систем реального времени. Отмеченное в первую очередь касается областей высоких технологий, где электроника является жизненно важной частью каждого нового продукта. Автомобильная и аэрокосмическая промышленность, промышленность средств связи – яркие примеры таких отраслей производства. Какие последствия может иметь недостаточно тщательное или бессистемное тестирование систем управления, в худшем случае его отсутствие, иллюстрируют следующие примеры.
Toyota объявила о начале сервисной кампании, предполагающей отзыв 19075 автомобилей модели Yaris, которые были выпущены в период с ноября 2005 по апрель 2006 года. Причиной для принятия такого решения стал конструктивный дефект подголовников и боковых подушек безопасности в салоне машины. Специалисты определили, что во время дорожно-транспортного происшествия есть вероятность того, что подушки безопасности могут не сработать.
Volvo придется установить новое программное обеспечение на более чем 170 000 автомобилей из-за сбоя в показаниях спидометра. Под отзыв попадают модели C70 (купе и кабриолет), S60, S70, S80, V70, V70XC и XC70, выпущенные в 1999-2000 годах. Chrysler отзывает 127 928 кроссоверов Pacifica для замены бензонасоса и программного обеспечения, устанавливаемого в блок управления двигателем. Дефектные машины были произведены в период с 1 августа по 30 сентября 2004 года.
При выполнении очередного испытательного полета на территории Рязанской области потерпел аварию третий летный экземпляр учебно-боевого самолета Як-130. Находясь на высоте 10 км, экипаж доложил на землю о возникших неполадках в системе управления самолетом, который перешел в самопроизвольное снижение, а затем свалился в штопор. Летчикам пришлось столкнуться со сбоем в работе системы управления самолетом – системы уникальной и, по сути, не имеющей аналогов в мировой авиации. Перепрограммирование системы управления Як-130 дает возможность изменения динамических параметров управляемости самолетом и позволяет имитировать характеристики устойчивости и управляемости практически любого современного боевого самолета. Подобная система представляет собой сложнейший комплекс оборудования, который требует тщательной и длительной доводки путем математического моделирования, а затем и практических испытаний в полете. Опыт создания современных боевых самолетов наглядно свидетельствует, что неожиданные отказы новых опытных систем и конфликты в не до конца отлаженном программном обеспечении зачастую становятся причинами летных происшествий. Достаточно вспомнить недавнюю аварию новейшего американского истребителя F/A-22A, разбившегося 20.12.2004 г. при взлете с авиабазы Неллис из-за сбоя программного обеспечения системы управления самолетом
Повышение надежности отладки и тестирования автономных систем реального времени на основе микропроцессорной техники требует как знаний современных технологий проектирования, так и понимания возможностей аппаратных средств и новых техник программирования. Целью данной работы является анализ методов и инструментальных средств компьютерного проектирования, отладки и тестирования систем управления, автоматизирующих отдельные этапы.
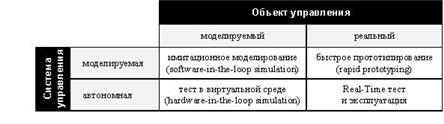
Одна из первых книг по автоматизированному проектированию систем управления (АПСУ) была переведена на русский язык в 1989 году [3]. В книгу вошли различные доклады, представленные на семинарах и симпозиумах, избранные статьи из специальных журналов. Книга давала полную и современную на тот момент времени информацию об АПСУ. Примечателен тот факт, что хотя в названии книги и используется термин “автоматизированное”, авторы справедливо включают в это понятие весь круг задач, которые приходится решать инженеру по проектированию систем управления. Другими словами, задачи построения математической модели, анализа, синтеза, имитационного моделирования и тестирования должны рассматриваться комплексно. Наиболее существенным моментом в развитии методологии АПСУ явилось осознание того факта, что процесс написания исполняемого кода и тестирования целевого оборудования может быть отделен от процесса синтеза и тестирования законов управления. Вследствие быстрых технологических изменений, произошедших за последние годы в рассматриваемой области, изменились как сами автономные системы реального времени, так и методы их разработки и отладки. В настоящее время процесс компьютерного проектирования систем управления осуществляется в программно-аппаратной среде. В ее состав интегрированы инструменты, обеспечивающие имитационное моделирование (англ. software-in-the-loop simulation), быстрое прототипирование на основе специализированной аппаратной платформы (англ. rapid prototyping), тестирование целевого оборудования в виртуальной среде (англ. hardware-in-the-loop simulation) ( рис. 1).
Синтез и анализ законов управления – задача довольно сложная, которая, однако, легко решается с помощью интерактивной среды имитационного моделирования на основе наглядных структурных схем при наличии библиотек стандартных элементов, например, Simulink. Как объект управления, так и система управления являются на этом этапе проектирования моделями. Преимуществами имитационного моделирования являются: работа в режиме offline, отсутствие привязки к конкретной аппаратной платформе, наглядность анализа и поиска ошибок, возможность быстрого перебора возможных вариантов решения. Переход к эксплуатации автономной системы управления связан с необходимостью отладки и тестирования аппаратных средств и программного обеспечения целевого оборудования, а также с устранением возникших ошибок. Часто в качестве отдельного этапа выделяют тестирование целевого оборудования в виртуальной среде. Компоненты системы управления при этом реализуются на автономной аппаратной платформе, в то время как объект заменяется моделью, которая просчитывается в реальном времени. Испытание в виртуальной среде позволяет безопасно оптимизировать законы управления без повреждения механической части объекта, а также проводить тесты, которые в реальности тяжело реализуемы или вообще невозможны, сводит к минимуму количество Real-Time тестов с реальным объектом. При этом, однако, предъявляются строгие требования к аппаратно-программному обеспечению, отвечающему за моделирование объекта. Для обеспечения адекватности постоянные времени и переходные процессы в физическом объекте должны точно воспроизводиться, что может потребовать просчета модели с частотой до 100 кГц, в зависимости от свойств моделируемого объекта.

Сегодня можно с уверенностью сказать, что традиционные подходы к проектированию систем управления перестали быть эффективными, т.к. требуют больших временных затрат [4]. Набирающий все большую популярность процесс быстрого прототипирования объединяет отдельные этапы проектирования прототипа, устраняя при этом потенциальные проблемы совместимости. Результаты проектирования можно сразу видеть и быстро вносить изменения в алгоритмы управления без использования дорогих аппаратных средств. После завершения синтеза и тестирования законов управления прототип системы управления можно заменить автономным устройством с тем же интерфейсом ввода/вывода, не покидая интегрированную среду проектирования. Необходимым условием для этого является наличие процедуры автоматического генерирования исполняемого кода для целевого процессора. Такой подход дает возможность отказаться от нескольких прототипов и избежать проблем, которые возникают из-за аппаратных различий между тестовой и конечной платформами. Сравнение процесса быстрого прототипирования с традиционным подходом проектирования иллюстрирует рис. 2.

Различают несколько разновидностей быстрого прототипирования. Два основных из них следующие [5]. Концептуальноориентированное быстрое прототипирование. Его цель – создание прототипа, который не привязан к последующей реализации на каком-либо определенном целевом оборудовании. На основе структурных схем модели системы управления здесь автоматически генерируется исполняемый код и тестируется на компьютере, имеющем интерфейс обмена сигналами с реальным объектом. Архитектурноориентированное быстрое прототипирование. Здесь сразу задаются конкретным целевым оборудованием, под которое должна быть адаптирована модель системы управления. Создаваемый прототип при этом будет максимально подобен автономной системе, что позволяет делать заключения о возможности реализации системы управления на выбранном целевом оборудовании.
Разработка системы и алгоритмов управления выполняется на основе моделей, поэтому построение кинематических и динамических моделей является важным этапом проектирования систем управления. Наиболее привлекательным в ходе прототипирования систем управления представляется использование среды MATLAB/Simulink, позволяющей легко моделировать электромеханические системы в виде структурных схем с помощью специализированных библиотек. Недостатком структурного моделирования сложных электромеханических систем является громоздкость получаемой модели и рабочего пространства. Моделирование динамики систем твердых тел – специализация так называемых программных пакетов физического моделирования, например, CMLabs Vortex и ODE (Open Dynamics Engine). Эти пакеты дают возможность построить модель робота на основе его кинематических и динамических параметров без вывода аналитических уравнений, а также реализовать моделирование в реальном времени. Чтобы использовать совместно с Simulink-моделью дополнительный программный пакет, моделирующий механическую часть объекта и его рабочее пространство, можно воспользоваться технологией Simulink-функций (или просто S-функций). Трудность применения программных пакетов физического моделирования заключается в том, что кинематические и динамические параметры объекта и его рабочего пространства в этих пакетах задаются в форме текстовых описаний. Что касается роботов, то их кинематика достаточно хорошо формализируема и может быть представлена в формате VRML (Virtual Reality Modeling Language), который поддерживается большинством современных программных пакетов САПР, например, SolidWorks и Autodesc Inventor. VRML-модель содержит в т.н. дереве сцены геометрические параметры объектов. Таким образом, стандартные САПР могут служить не только удобным инструментом быстрого проектирования механической части робота, но и средством описания кинематики робота и геометрии его рабочего пространства. Дополнив VRML-модель робота динамическими параметрами, ее можно преобразовать в формат данных, который поддерживается программным пакетом физического моделирования. За счет этого можно значительно ускорить и облегчить процесс построения модели робота. Основные шаги данной концепции проектирования механической части и построения модели робота изложены в [7]. Практические результаты. С целью апробации разработанной методики проектирования и тестирования систем управления движением сложных электромеханических объектов с помощью компьютерных средств на кафедре систем программного управления и мехатроники ДонНТУ разработан проект лабораторного прототипа механизма с параллельными кинематическими связями (параллельный робот) с двумя степенями подвижности, см. рис.3 и рис.4

