|
| ||
| | ||
|
|
Горобец Николай МихайловичФакультет: ЭлектротехническийКафедра: Электропривод и автоматизация промышленных установокТема работы: Исследование современных сервоприводов на базе синхронного двигателя с постоянными магнитамиРуководитель: Толочко Ольга ИвановнаТехнический консультант: Розкаряка Павел Иванович |
|
| | ||
|
||
 
|
||
| | ||
ВведениеДо недавних пор в приводной технике в основном применялись двигатели постоянного тока. В настоящее же время происходит смещение акцентов в приводных системах от двигателей постоянного тока к двигателям переменного тока. Тенденция перехода к синхронным двигателям переменного тока особенно очевидна в сервосистемах, которые почти всегда выполнялись с использованием электроприводов постоянного тока. Использование конструктивных особенностей двигателей, достижения в области электроники, разработки в области систем регулирования существенно позволяют поднять качество регулирования в сервосистем на новый уровень. Что, безусловно, является актуальным вопросом для многих отраслей промышленности, где предъявляются высокие требования к системам электропривода. Определение сервопривода, классификация, история развития, области примененияСервопривод - это система привода, которая в широком диапазоне регулирования скорости обеспечивает динамичные, высокоточные процессы движения и реализует их хорошую повторяемость. В современном производстве к сервоприводу предъявляются высокие требования по следующим параметрам:
Сервоприводы являются наиболее высокотехнологичной областью электропривода. На данный момент сервоприводы используются в высокопродуктивном оборудовании следующих отраслей: производство пищевых продуктов, стройматериалов, упаковка, подъемно – транспортные механизмы. Первоначально среди сервосистем доминировал привод постоянного тока. Это было связано с простотой реализации законов управления по напряжению якоря. В качестве управляющих устройств применялись электромашинные усилители, транзисторные и тиристорные регуляторы. Управление скоростью и моментом было аналоговым, со всеми вытекающими из этого проблемами помехоустойчивости в широком диапазоне регулирования скорости. Для измерения действительной скорости в канале обратной связи применялись тахогенераторы постоянного тока. Повышение динамических характеристик сервоприводов проходило в направлении создания двигателей постоянного тока с малым моментом инерции. В основу получения малого момента инерции ротора было положено решение о получении цилиндрического немагнитного якоря. Для этого в начале 70-х годов стали широко применять постоянные магниты из редкоземельных материалов, обеспечивающих получение повышенного значения индукции в воздушном зазоре и высокого крутящего момента. Исследования бесщеточных двигателей, которые могут быть использованы в сервоприводах, были начаты с середины 70-х годов. В противоположность обычной компоновки двигателя постоянного тока разработчики пришли к перспективному новому решению: якорь на статоре, поле возбуждения на роторе. Так появились бесщеточные двигатели постоянного тока, или двигатели с электронной коммутацией. Эти электрические машины принципиально представляют собой синхронные двигатели CД с постоянными магнитами, в которых положение ротора контролируется простым импульсным датчиком положения. В дополнение к электронной бесконтактной коммутации и низкому износу, этот тип привода имеет следующие преимущества:
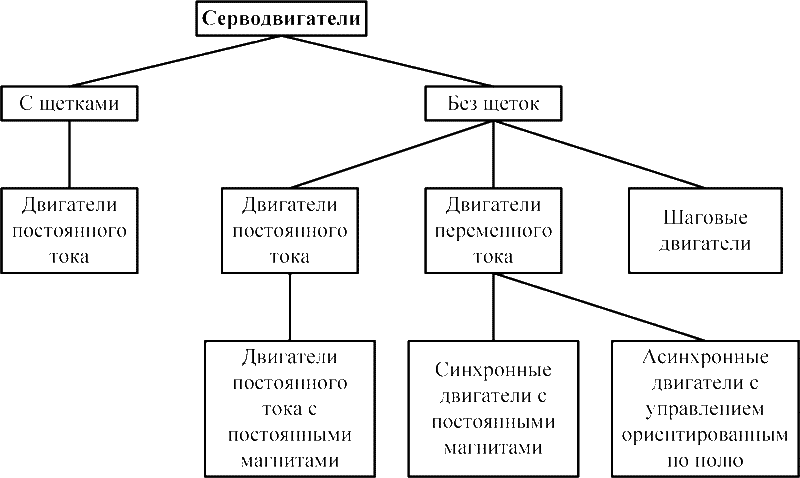
Параллельно с этим развивалось также и направление по применению асинхронного двигателя переменного тока в качестве бесщеточного сервопривода. С другой стороны, с разработкой бесщеточных двигателей проводились теоретические исследования по так называемой синусной коммутации сервопривода. Принципиально двигатель с синусной коммутацией представляет собой СД с постоянными магнитами, со всеми преимуществами, указанными выше. Однако, датчиком положения ротора в этом случае служит резольвер, выходными синусоидальными сигналами которого управляется ток статора машины. Указанные выше все три типа бесщеточных приводов используются в настоящее время. На рисунке 1 приведена классификация серводвигателей.
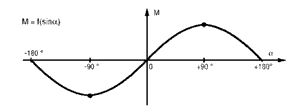
Рисунок 1 – Классификация серводвигателей Принцип действия синхронных двигателей с постоянными магнитамиПри питании двигателя от преобразователя, обмотками статора создается вращающееся магнитное поле статора. Оно воздействует на ротор, образуя приложенное к нему усилие. Благодаря магнитной связи между статором и ротором ротор ускоряется и в дальнейшем вращается с той же угловой скоростью, что и поле статора, т.е. синхронно. При увеличении нагрузки на валу поле ротора начинает отставать от поля статора на некоторый, так называемый, полюсный угол a. Сначала вращающий момент растет с ростом угла. Когда угол достигает 90°, т.е. полюс ротора расположен точно между двумя полюсами статора, усилие, действующее на ротор, достигает максимума. Это тот случай, когда поле статора опережает поле ротора и тянет за собой ротор. Если полюсной угол продолжает увеличиваться, т.е. двигатель перегружен, то вращающий момент уменьшается, двигатель попадает в зону неустойчивой работы и останавливается, т.е. вращающий момент является функцией напряжения, тока и полюсного угла (см. рис. 2).
Рисунок 2 – Зависимость вращающего момента от полюсного угла Чтобы двигатель использовался с максимально возможным моментом, надо обеспечить, чтобы полюсный угол был равен а = 90°. В двигательном режиме поле статора при этом опережает ротор, а в генераторном - отстает от него на 90°. Задача управления двигателем состоит в том, чтобы рассчитать задающие значения трех фазных токов, исходя из требуемого момента, и задать пространственное размещение векторов тока. Для этого определяется с помощью датчика реальное положения ротора. К полученному значению угла ротора в зависимости от направления вращения и знака момента прибавляются или вычитаются 90° и рассчитывается требуемый ток. Для каждого углового положения ротора определяется соответствующее положение поля статора, т.е. ротор определяет значение и направление поля статора. Таким образом ротор «поворачивает» поле статора. (см. рис. 3)
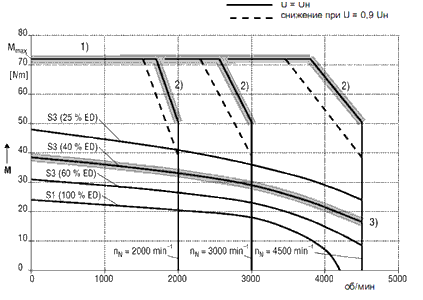
Рисунок 3 – Пространственный вектор тока * GIF-анимация выполненна в приложении Easy GIF Animator, время кадра - 0,1 с, количество кадров - 12, продолжительность анимации - 10 с, размер - 300x388 точек, размер файла - 37,1 КБ. Механические характеристики двигателя представлены на рисунке 4. На нем наблюдается три зоны ограничения.
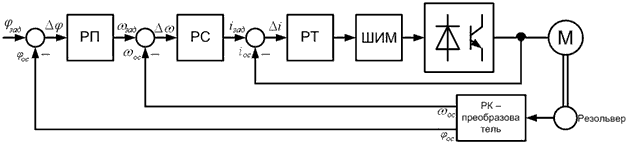
Рисунок 4 – Механические характеристики серводвигателя (ED – продолжительность включения) Построение системы автоматического регулирования положениемВ большинстве случаев сервопривод используется для регулирования положением. Системы автоматического регулирования положения (позиционные САР) строятся путем дополнения САР скорости системой автоматического регулирования положения. С этой целью используют замкнутую систему регулирования по положению, для построения которой необходимы датчик положения (или угла поворота вала) ДП, регулятор положения РП и задающее устройство. На вход контура положения подается управляющее воздействие Fзад, формируемое задающим устройством. Регулятор положения формирует задание Wзад для подчиненной ему САР скорости. Таким образом, для регулирования положения используется трехконтурная структура, содержащая внутренний контур регулирования тока якоря, промежуточный контур регулирования скорости и внешний контур регулирования положения. На рисунке 5 представлена структурная схема такой системы регулирования.
Рисунок 5 – Структурная схема системы управления В большинстве промышленных электроприводов, оснащенных позиционными системами, применяется такой процесс отработки перемещения, при которых скорость изменяется по треугольному (трапецеидальному) графику. Эти диаграммы работы привода являются оптимальными по быстродействию. Для реализации таких систем большинство мировых производителей выпускают специальные модули управления движения (Motion Control). Эти модули позволяют реализовывать задающие устройства для системы управления положением и решать конкретные прикладные задачи. Реализация других законов управления позиционным электроприводом, например, оптимальных по тепловым потерям, на таких модулях невозможна. В этом случае необходимо использование дополнительного оборудования, которое содержит специальные алгоритмы для решения таких задач позиционирования. При рассмотрении позиционной системы различают:
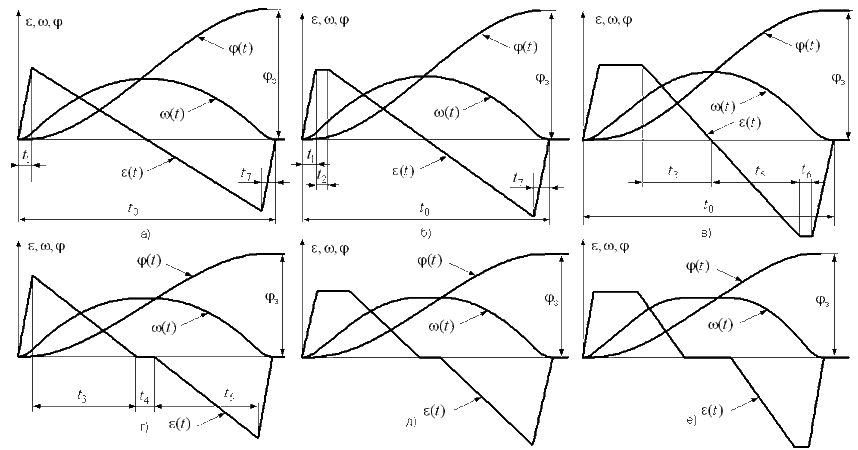
Возможны такие типы оптимальных диаграмм для условий обеспечения минимума тепловых потерь в якоре двигателе при отработке заданного перемещения Fз за заданное время t0 с ограничением на рывок p0, ток I0 и скорость W0, при наличии на валу двигателя постоянного реактивного статического момента Мс=const в относительных единицах представлены на рисунке 6.
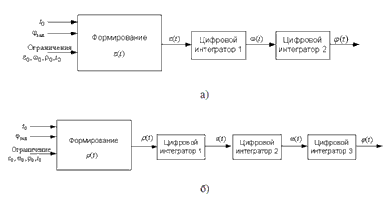
Рисунок 6 – Диаграммы оптимальные по тепловым потерям Обычно такие задающие устройства работают следующим образом. Сначала они формируют диаграмму задания на ускорение или рывок в виде кусочно-линейной аппроксимации табличной зависимости, узловые точки которой рассчитываются исходя из величины перемещения Fзад, которое отрабатывается и желаемого время работы с учетом ограничений на скорость и W и ускорение e (а иногда и рывок p). Полученные сигналы дважды (трижды) интегрируются и в результате получаются желаемые диаграммы скорости W(t) и положения F(t) (см. рис. 7).
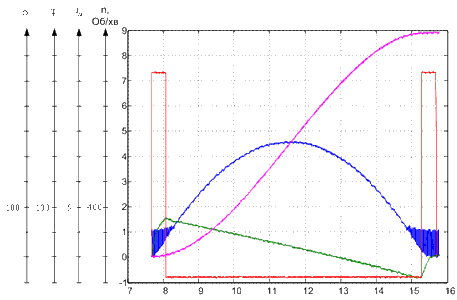
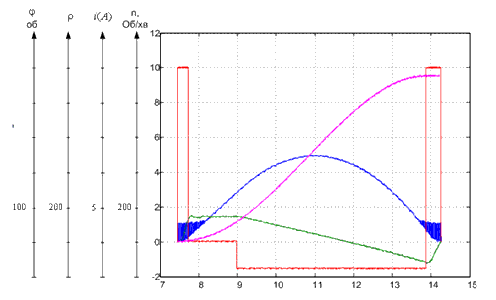
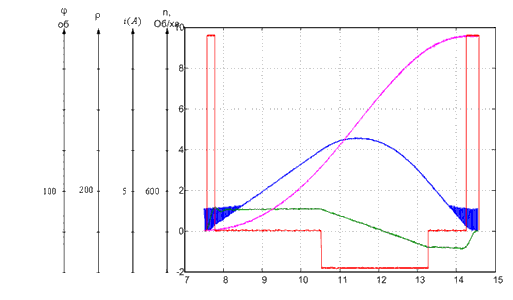
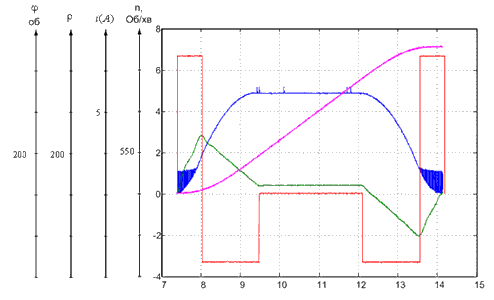
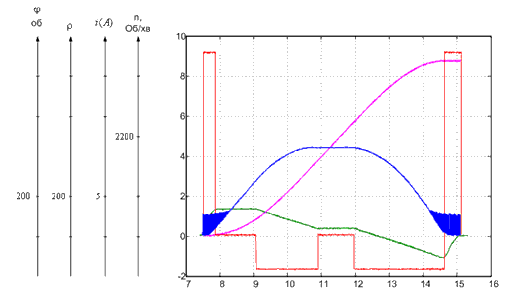
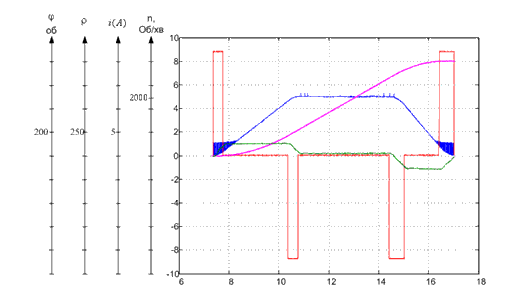
Рисунок 7 - Структура задатчика положения а) задатчик формирует сигнал задания на ускорение б) задатчик формирует сигнал задания на рывок На рисунках 8 – 13 представлены экспериментальные полученные графики переходных процессов при работе такой системы
Рисунок 8 – Диаграмма отработки перемещения без ограничений (6.а)
Рисунок 9 – Диаграмма отработки перемещения с ограничением при разгоне (6.б)
Рисунок 10 – Диаграмма отработки перемещения с ограничением при разгоне (6.в)
Рисунок 11 – Диаграмма отработки перемещения с ограничением при разгоне (6.г)
Рисунок 12 – Диаграмма отработки перемещения с ограничением при разгоне (6.д)
Рисунок 13 – Диаграмма отработки перемещения с ограничением при разгоне (6.е) Литература
|
||
| | ||
|
|
||
|
|
||
| | ||