|
| ||
| | ||
|
|
Горобець Микола МихайловичФакультет: ЕлектротехнічнийКафедра: Електропривод та автоматизація промислового встакуванняТема роботи: Дослідження сучасних сервоприводов на базі синхроного двигуна з постійними магнітамиКерівник: Толочко Ольга ІвановнаТехнічний консультанат: Розкаряка Павло Іванович |
|
| | ||
|
||
 
|
||
| | ||
ВступДо недавнього часу у приводній техніці в основному застосовувалися двигуни постійного струму. У наш час відбувається зсув акцентів у приводних системах від двигунів постійного струму до двигунів змінного струму. Тенденція переходу до синхронних двигунів змінного струму особливо очевидна в сервосистемах, які майже завжди виконувалися з використанням електроприводів постійного струму. Використання конструктивних особливостей двигунів, досягнення в галузі електроніки, розробки в галузі систем регулювання істотно дозволяють підняти якість регулювання в сервосистем на новий рівень. Що, безумовно, є актуальним питанням для багатьох галузей промисловості, де пред'являються високі вимоги до систем електропривода. Визначення сервопривода, класифікація, історія розвитку, галузі застосуванняСервопривод - це система привода, що у широкому діапазоні регулювання швидкості забезпечує динамічні, високоточні процеси переміщення й реалізує їхню гарну повторюваність. У сучасному виробництві до сервоприводу пред'являються високі вимоги по наступних параметрах:
Сервоприводи є найбільше високотехнологічною галуззю електропривода. На даний момент сервоприводи використаються у високопродуктивному встаткуванні наступних галузей: виробництво харчових продуктів, будматеріалів, упакування, підйомні - транспортні механізми. Спочатку серед сервосистем домінував привод постійного струму. Це було пов'язане із простотою реалізації законів керування по напрузі якоря. Як керуючі пристрої застосовувалися електромашинні підсилювачі, транзисторні й тиристорні регулятори. Керування швидкістю й моментом було аналоговим, з усіма, що випливають із цього проблемами завадостійкості в широкому діапазоні регулювання швидкості. Для виміру дійсної швидкості в каналі зворотного зв'язку застосовувалися тахогенератори постійного струму. Підвищення динамічних характеристик сервоприводов проходило в напрямку створення двигунів постійного струму з малим моментом інерції. В основу одержання малого моменту інерції ротора було покладене рішення про одержання циліндричного немагнітного якоря. Для цього на початку 70-х років стали широко застосовувати постійні магніти з рідкоземельних матеріалів, що забезпечують одержання підвищеного значення індукції в повітряному зазорі й високого моменту. Дослідження безщіточних двигунів, які можуть бути використані в сервоприводах, були початі із середини 70-х років. На противагу звичайного компонування двигуна постійного струму розроблювачі прийшли до перспективного нового рішення: якір на статорі, поле збудження на роторі. Так з'явилися бесщіточні двигуни постійного струму, або двигуни з електронною комутацією. Ці електричні машини принципово являють собою синхронні двигуни з постійними магнітами, у яких положення ротора контролюється простим імпульсним датчиком положення. На додаток до електронної безконтактної комутації й низького зношування, цей тип привода має наступні переваги:
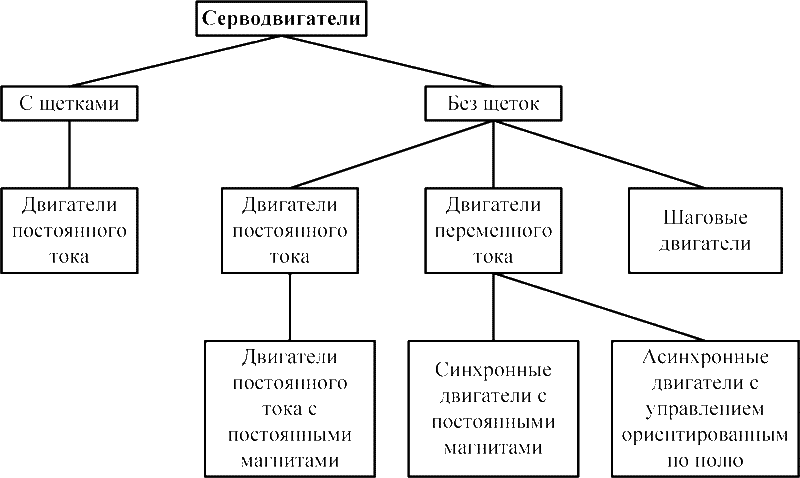
Паралельно із цим розвивався також і напрямок з застосуванню асинхронного двигуна змінного струму в якості бесщіточного сервопривода. З іншого боку, з розробкою безщіточних двигунів проводилися теоретичні дослідження з так називаної синусної комутації сервопривода. Принципово двигун із синусною комутацією являє собою СД із постійними магнітами, з усіма перевагами, зазначеними вище. Однак, датчиком положення ротора в цьому випадку служить резольвер, вихідними синусоїдальними сигналами якого управляється струм статора машини. Зазначені вище всі три типи бесщіточних приводів використаються в цей час. На рисунку 1 наведена класифікація серводвигунів
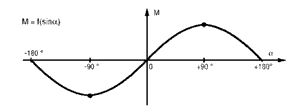
Класифікація серводвигунів Принцип дії синхронних двигунів з постійними магнітамиПри живленні двигуна від перетворювача, обмотками статора створюється обертове магнітне поле статора. Воно впливає на ротор, утворюючи прикладене до нього зусилля. Завдяки магнітному зв'язку між статором і ротором ротор прискорюється й надалі обертається з тією же кутовою швидкістю, що й поле статора, тобто синхронно. При збільшенні навантаження на валу поле ротора починає відставати від поля статора на деякий, так званий, полюсний кут a. Спочатку обертаючий момент росте з ростом кута. Коли кут досягає 90°, тобто полюс ротора розташований точно між двома полюсами статора, зусилля, що діє на ротор, досягає максимуму. Це той випадок, коли поле статора випереджає поле ротора й тягне за собою ротор. Якщо полюсний кут продовжує збільшуватися, тобто двигун перевантажений, то обертаючий момент зменшується, двигун потрапляє в зону нестійкої роботи й зупиняється, тобто обертаючий момент є функцією напруги, струму й полюсного кута (див. Рис. 2).
Рисунок 2 – Залежність обертаючого моменту від полюсного кута Щоб двигун використався з максимально можливим моментом, треба забезпечити, щоб полюсний кут був a = 90°. У руховому режимі поле статора при цьому випереджає ротор, а в генераторному - відстає від нього на 90°. Завдання керування двигуном полягає в тому, щоб розрахувати значення, що задають, трьох фазних струмів, виходячи з необхідного моменту, і задати просторове розміщення векторів струму. Для цього визначається за допомогою датчика реальне положення ротора. До отриманого значення кута ротора залежно від напрямку обертання й знака моменту додаються або віднімаються 90° і розраховується необхідний струм. Для кожного кутового положення ротора визначається відповідне положення поля статора, тобто ротор визначає значення й напрямок поля статора. У такий спосіб ротор «повертає» поле статора (см. рис. 3)
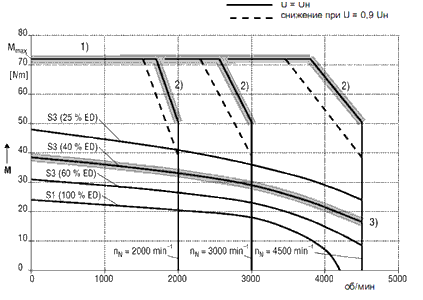
Рисунок 3 – Просторовий вектор струму * GIF-анiмацiя виконана в Easy GIF Animator, час кадру - 0,1 с, кiлькicть кадрiв - 12, тривалicть анiмацii - 10 с, розмiр - 300x388 точок, розмiр файла - 37,1 КБ. Механічні характеристики двигуна представлені на рисунку 4. На ньому спостерігається три зони обмеження.
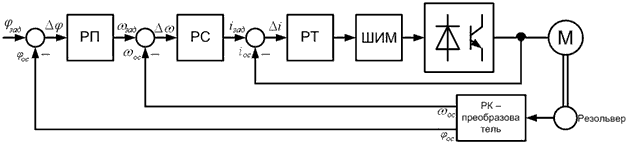
Рисунок 4 – Механічні характеристики серводвигуна (ED – тривалість включення) Побудова системи автоматичного регулювання положеннямУ більшості випадків сервопривод використовується для регулювання положенням. Системи автоматичного регулювання положення (позиційні САР) будуються шляхом доповнення САР швидкості системою автоматичного регулювання положення. Із цією метою використають замкнуту систему регулювання по положенню, для побудови якої необхідні датчик положення (або кута повороту вала) ДП, регулятор положення РП і пристрій, що задає. На вхід контуру положення подається керуючий вплив Fзад, формоване пристроєм, що задає. Регулятор положення формує завдання Wзад для підлеглої йому САР швидкості. Таким чином, для регулювання положення використається трьохконтурна структура, що містить внутрішній контур регулювання струму якоря, проміжний контур регулювання швидкості й зовнішній контур регулювання положення. На рисунку 5 представлена структурна схема такої системи регулювання.
Рисунок 5 – Структурна схема системи керування У більшості промислових електроприводів, оснащених позиційними системами, застосовується такий процес відпрацьовування переміщення, при яких швидкість змінюється по трикутному (трапецеїдальному) графіку. Ці діаграми роботи привода є оптимальними по швидкодії. Для реалізації таких систем більшість світових виробників випускають спеціальні модулі керування руху (Motion Control). Ці модулі дозволяють реалізовувати пристрої, що задають, для системи керування положенням і вирішувати конкретні прикладні завдання. Реалізація інших законів керування позиційним електроприводом, наприклад, оптимальних за тепловими втратами, на таких модулях неможлива. У цьому випадку необхідне використання додаткового встаткування, що містить спеціальні алгоритми для рішення таких завдань позиціювання. При розгляді позиційної системи розрізняють:
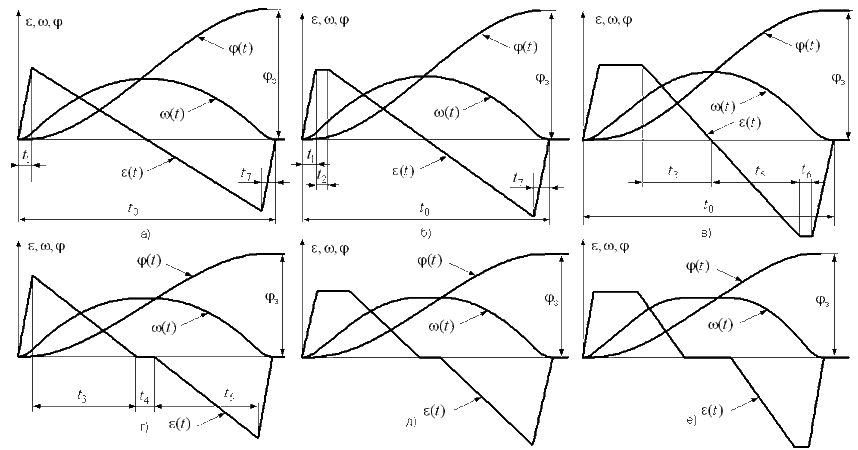
Можливі такі типи оптимальних діаграм для умов забезпечення мінімуму теплових втрат у якорі двигуна при відпрацьовуванні заданого переміщення Fз за заданий час t0 з обмеженням на ривок p0, струм I0 і швидкість W0, при наявності на валу двигуна постійного реактивного статичного моменту Мс=const у відносних одиницях представлені на рисунку 6.
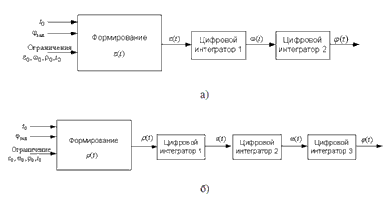
Рисунок 6 – Диаграммы оптимальные по тепловым потерям Зазвичай такі задающі пристрої працюють у такий спосіб. Спочатку вони формують діаграму завдання на прискорення або ривок у вигляді кусочно-лінійної апроксимації табличної залежності, вузлові крапки якої розраховуються виходячи з величини переміщення Fзад, що відпрацьовуються й бажаного час роботи з урахуванням обмежень на швидкість й W і прискорення e (а іноді й ривок p). Отримані сигнали двічі (тричі) інтегруються й у результаті виходять бажані діаграми швидкості W(t) і положення F(t) (див. рис. 10). (см. рис. 7).
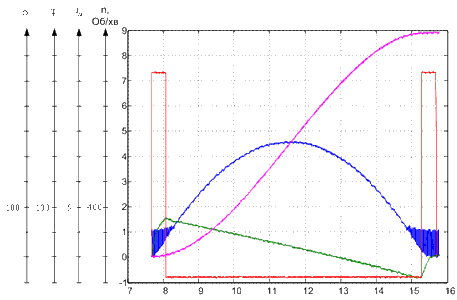
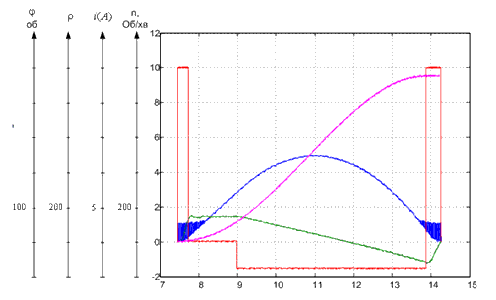
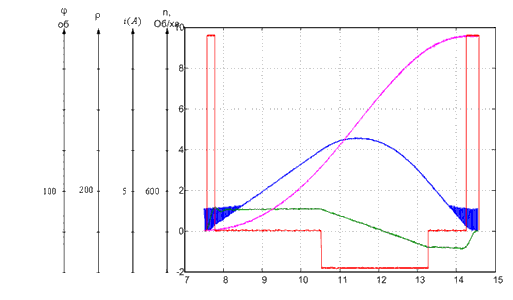
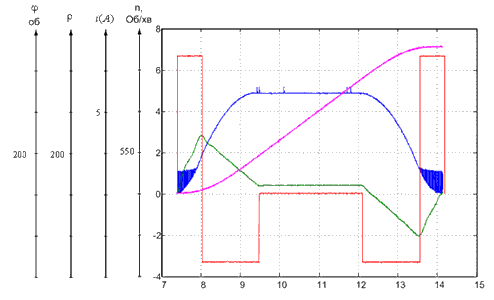
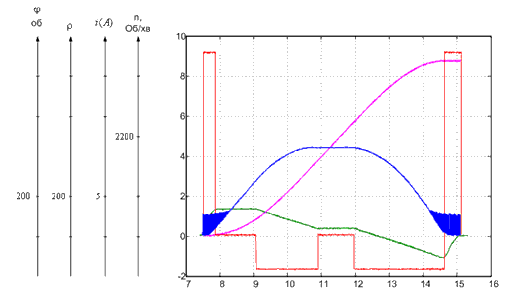
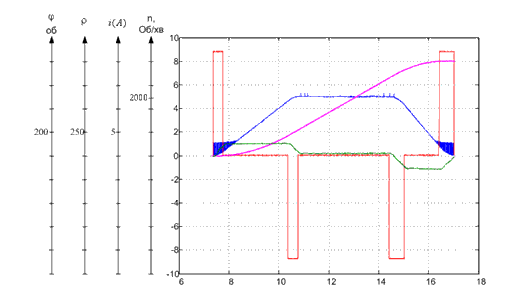
Рисунок 7 - Структура задатчика положення а) задатчик формує сигнал завдання на прискорення б) задатчик формує сигнал завдання на ривок На рисунках 8 – 13 представлені експериментальні отримані графіки перехідних процесів при роботі такої системи.
Рисунок 8 – Діаграма відпрацьовування переміщення без обмежень (6.а)
Рисунок 9 – Діаграма відпрацьовування переміщення з обмеженням при розгоні (6.б)
Рисунок 10 – Діаграма відпрацьовування переміщення з обмеженням при розгоні й гальмуванні (6.в)
Рисунок 11 – Діаграма відпрацьовування переміщення з обмеженням на швидкість (6.г)
Рисунок 12 – Діаграма відпрацьовування переміщення з обмеженням на швидкість (6.д)
Рисунок 13 – Діаграма відпрацьовування переміщення з обмеженням на швидкість (6.е) Перелiк посилань
|
||
| | ||
|
|
||
|
|
||
| | ||