
Пліс Павло Сергійович
Електротехнічний факультет
Спеціальність: Електромеханічні системи автоматизації та електропривод
Тема випускної роботи:
Розробка законів регулювання продуктивністю механізмів аерогідродинамічної групи в умовах ДМЗ
Науковий Керівник: Борисенко Володимир Пилипович
Реферат з теми випускної роботи
Вступ
Традиційні способи регулювання подачі насосної станції (НС) - дроселювання напору заслінок, зміна числа працюючих одночасно агрегатів - енергетично невигідні, тому що до 30% споживаної енергії нераціонально витрачається на втрати енергії в дроселюючому органі, освіта надлишкових напорів в мережі. Більшість електродвигунів НС працюють в нерегульованому режимі, а отже з низькою ефективністю. У зв'язку з недоліками проектування і експлуатації електроприводу коефіцієнт завантаження багатьох машин не перевищує 50%, що показує необхідність зниження встановленої потужності двигунів. Робота приводу в незавантажених режимі веде до великих втрат. У таких умовах оптимізація роботи НС як за технологічним вимогам, так і за умов збереження високого ККД можлива тільки при регулюванні швидкості обертання робочого колеса насоса. Застосування систем регульованим електроприводу дозволяє плавно змінювати робочі параметри НС без непродуктивних витрат електроенергії та з широкими можливостями підвищення точності та ефективності технологічного процесу. Дозволяє збільшити довговічність трубопроводів та устаткування за рахунок зниження статичних та динамічних навантажень від надмірного тиску, зменшити розміри насосних станцій за рахунок збільшення та зменшення числа насосних агрегатів. Незважаючи на важливість насосних установок, їм приділяється мало уваги в плані їх вдосконалення, зменшення енергетичних витрат і т.п. В даний момент НС - одна з найбільш енергоємних споживачів у всьому господарському комплексі.
Огляд теми
В якості прикладу розглянемо насосну станцію з трьома насосами (рис.1). З живильної магістралі 1, тиск у якій коливається в діапазоні від 1 до 2,5 атм, насоси Н1, Н2, Н3 перекачує воду в напірній магістраль 2. За умовами технологічного процесу підприємства тиск в напірній колекторі станції повинна підтримуватися на рівні 8 атм. При цьому перший насос забезпечує подачу в діапазоні 30 м3/ч≤Q≤90 м3/ч (0,3QH≤Q≤0,9QH), причому регулювання продуктивності здійснюється за рахунок дросселірованія (засувки) в напірній магістралі, що призводить до значних втрат енергії [1].
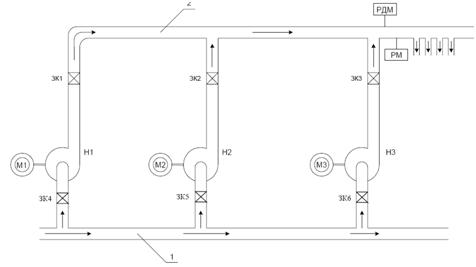
При суттєвому зростанні споживання води (понад 0,9 QH) включається другий насосний агрегат і оператор за допомогою засувок ЗК1-ЗК3 з ручним приводом встановлює необхідне значення тиску навантаження в магістралі і паралельно вирівнює навантаження насосних агрегатів Н1 і Н2. Така «ручна автоматика» вступає в дію кожен раз при чергових Підвищення та зниження тиску. Насос Н3 - резервний, він включається в разі виходу з ладу Н1 або Н2. На нагнітає трубопроводі встановлені: РДМ - реле тиску магістральні, призначене для автоматизації роботи установки; РМ - витратоміри, контролюючий потік перекачується води. Відмітною особливістю даної групи механізмів являються полегшені умови їх пуску. Ці механізми як в нормальних умовах, так і після аварійного відключення пускаються, як правило, в холостому. При цьому момент троганія не перевищує 30-35% номінального моменту. Навантаження на валу привідної двигуна насоса може бути представлена як:
где Мст – момент зрушання механізму; Мср – розрахунковий момент опору при ω=ωH; Мc0 – звичайно не перевищує (0,05…0,1Мcp), де Мcp визначається як:
Для установок з «вентиляторним» навантаженням момент опору плавно зростає зі збільшенням швидкості, що сприятливо узгоджується з формою механічної характеристики асинхронного двигуна.
У ряді випадків при пуску насосних агрегатів з «загустівшим» робочим тілом величина моменту троганія може в десятки разів перевищувати значення, вказані вище. Для реалізації успішного пуску в таких умовах можливо почергове включення двигуна «вперед-назад» на малій частоті живильного напруги для зміни консистентні робочого тіла. Після таких підготовчих операцій система, звичайно, запускається без проблем [2].
Існуючі способи регулювання режимів роботи НУ
Для забезпечення заданого режиму роботи НС при зміні умов потрібно здійснювати регулювання режимів роботи насосних установок. Ця задача може бути розділена на два напрямки: регулювання гідравлічних режимів роботи насосів та регулювання енергетичної ефективності роботи обладнання НС. Регулювання продуктивності насосів можливо за рахунок ручного зміни поперечного перерізу трубопроводу механічним пристроєм у вигляді засувки, діафрагми і т.п., а також зміною частоти обертання робочого колеса насосної установки, що здійснюється в системах електроприводу з частотними перетворювачами. Прикриваючи та відкриваючи затвор, змінюють крутизна характеристики Q-H трубопроводу (рис.3), яка залежить від його гідравлічного опору.
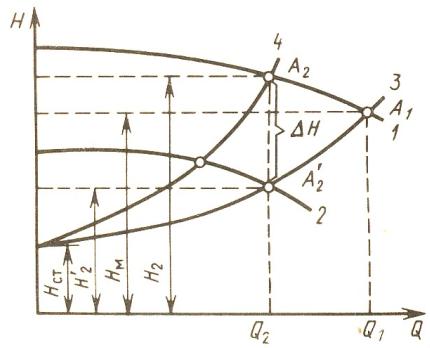
Прикриваючи затвор, збільшують крутизна характеристики, при цьому робоча точка насоса A1 переміщується у положення А2. при цьому подача зменшується до значення Q2 напір, розвиваємо насосом зростає до значення Н2, а натиск на трубопроводі за затвором знижується до значення Н2'за рахунок втрат напору ΔН в затвора. Збільшуючи ступінь відкриття затвора, зменшують крутизна характеристики трубопроводу. Внаслідок цього подача збільшується, напір, розвиваємо насосом, зменшується, а напір у трубопроводі за затвором зростає. Цей спосіб регулювання малоекономічен, так як на подолання додаткового гідравлічного опору в затвора потрібні додаткові витрати енергії. При зміні частоти обертання насоса змінюється положення характеристики Q-H насоса. Зменшуючи частоту обертання, переміщають характеристику вниз паралельно самій собі. При цьому, робоча точка, переміщаючись по характеристиці трубопроводу, займає положення A2', отже, подача зменшується так само, як і напір в мережі і напір, розвиваємо насосом. У сучасних насосних станціях (НС) застосовується два основних типи регулювання продуктивності - Каскадне і частотно. Каскадне регулювання полягає у включенні і вимиканні паралельно встановлених насосів. Точність і економічність регулювання при цьому визначається кількістю встановлених насосних агрегатів. Частотне регулювання дозволяє регулювати продуктивність насосних станцій за рахунок зміни частоти обертання насосів за допомогою перетворювачів частоти (ПЧ). Найбільш оптимальним, з точки зору техніко-економічних показників, що є спосіб управління, коли при неможливості забезпечити одним насосом необхідної продуктивності НС, в роботу включається наступний. При цьому перший двигун підключається безпосередньо до живильної мережі, а вступає в роботу - виводиться на робочу частоту за допомогою ПЧ. Продуктивність другого насоса буде визначатися виразом:
де Q1H – номінальна продуктивність першого насосного агрегату; Qc – споживання в мережі в теперішній момент; ΔQп – втрати в гідравлічній мережі [3]
Для рівномірного зносу двигунів рекомендується також змінювати їх порядок підключення. Спрощена схема цього способу наведена на мал.1. Контроль витрат і тиску здійснюється в конкретних диктує точках мережі. Ця інформація передається в програмований логічний контролер (ПЛК),
де відбувається порівняння поточних значень контрольованих параметрів із заданими, і виробляються керуючі впливу в систему регулювання. ПЛК обробляє що надходять на нього сигнали від датчика витрати і тиску, впливає на ПЧ, що змінює швидкість обертання привідної двигуна насосного агрегату, і управляє підключенням потрібної кількості двигунів для забезпечення споживчих потреб. Спеціалізовані ПЧ здатні замінити ПЛК, так як вся логіка вже є всередині них. Слід зазначити, що сучасні ПЧ здатні регулювати подачу як за графіком, так і по заданому витраті. Застосування регульованого приводу насоса забезпечує роботу НС в зоні оптимальних значень ККД. А каскадної-частотного регулювання продуктивності НС дозволяє оптимізувати ефективність роботи насосних агрегатів у режимі неповної продуктивності, дозволяє знизити на 50-70% споживання електроенергії та сприяє зносостійкості та довголіттю елементної бази системи водопостачання [4].
Висновок
В теперішній час опрацьовані ідеологічні, організаційні та схемотехнічне аспекти застосування частотно-регульованих електроприводів. Розроблені та апробовані різні методики з визначення економічного ефекту від їх впровадження, з розрахунку необхідної потужності перетворювача. Але визначення ефективності застосування частотного регулювання є «індивідуальним» і вимагає в кожному конкретному випадку проведення дослідження об'єкта, тобто визначення характеристик мережі та насосних агрегатів, проведення розрахунків з урахуванням специфіки та особливостей об'єкта та його обладнання. І, тим не менш, залишається ряд нагальних проблем, які пов'язані, перш за все, зі стабілізацією тиску в диктує точках, ліквідацією гідроудар при регулюванні продуктивності різкими коливаннями тиску на вході і витрати на виході станцій [5]. Ситуація ускладнюється через стан мережі та її запірної апаратури, а також зважаючи на відсутність точної інформації про процеси, що протікають в різних ділянках мережі. Для аналізу неустановівшіхся перехідних процесів у складних гідравлічних мережах з наступним впливом на виконавчий орган передбачається використання нейронних мереж і непарній логіки (фаззілогікі). Перші являють собою обчислювальні структури, адаптованість та навчальні шляхом аналізу позитивних і негативних впливів. Це математична модель, а також пристрої паралельних обчислень, що представляють собою систему з'єднаних і взаємодіючих між собою простих процесорів (штучних нейронів). Що стосується непарній логіки, то вона дає право отримувати стійке рішення в умовах похибки інформації та нечіткість виробничих обмежень у вигляді функцій приналежності. Непарна логіка дає можливість формалізації неточних знань про систему, внесення в модель відомостей про неповноти інформації, що значно знижує можливість отримання несумісних рішень при розрахунку та оптимізації.
Література
- Электромеханические системы автоматизации стационарных установок/ Под общ. редакцией проф. Борисенко В.Ф., Донецк: ДонНТУ, НПФ МИДИЭЛ, 2005. – 281 с.
- Борисенко В.Ф., Григорьев С.В., Моргунов В.М. и др. Вопросы повышения производительности нагнетательной станции средствами электропривода. Машиностроение и техносфера ХХІ века// сб. трудов МНТК в г.Севастополе 13-18 сентября 2004 г., Донецк: ДонНТУ, т.1, 73-75 с.
- Лезнов Б.С.Экономия электроэнергии в насосных установках. – М.: Энергоатомиздат, 1991. – 144 с.
- Борисенко В.Ф., Поляков В.А., Плис П.С. Анализ каскадно-частотного регулирования производительности насосных станций// Сборник статей кафедры «Общая электротехника» ДонНТУ, 2009.
- Коренькова Т.В. Насоси. Особливості включення. Характеристики насосів і режимів енергоспоживання при перемінній швидкості обертання: Навч.посібник. – Кременчук: КДПУ, 2002. – 56 с.
- Ключев В.И., Терехов В.М. Электропривод и автоматизация общепромышленных механизмов: Учебник для вузов. – М.: Энергия, 1980. – 360 с., ил.
- Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленинг. отд-ние, 1982. – 392 с., ил.
- Шлипченко З.С. Насосы, компрессоры и вентиляторы. – К., «Техніка», 1976, 368 с.
- Под ред. Новикова В.А., Чернмгова Л.М. Инжиниринг электроприводов и систем автоматизации. – М.: Издательский центр «Академия», 2006. – 352 с.
- Виноградов А.А., Сибирцев А.И., Колодин И.В. Автоматизация насосной установки с применением частотно-регулируемого электропривода//Силовая электроника №2, 2006. [Электронный ресурс], – http://masters.donntu.ru/2008/eltf/sukiasyan/library/letter1.htm