 |
Криволапов Павло ПавловичЕлектротехничний факультетКафедра електропривод та автоматизація промислових установокСпециальность: Електромеханічні системи автоматизациї та електроприводТема выпускної роботы:Дослідження сучасних систем електропривода з двозонним регулюванням швидкостіНауковий керівник: Толочко Ольга Іванівна |
Дослідження сучасних систем електропривода з двозонним регулюванням швидкості
Вступ
Актуальність теми. Досягнення в галузі силової електроніки та мікропроцесорної техніки дають нові можливості поширенню регульованного електроприводу. Висока швидкість обробки інформації сучасними процесорами дала поштовх розвитку старих і розробці нових алгоритмів управління системою «перетворювач-двигун». Двозонне регулювання використовується, перш за все, в тих механізмах, статичний момент яких із зростанням швидкості зменшується (механізми обертання шпінделя металоріжучих верстатів, деякі прокатні стани, механізми що намотують та інше), це дає можливість, порівняно з однозонними приводами, повністю використовувати потужність двигуна, адже при збільшенні швидкості потужність двигуна зростатиме і, відповідно, зростатиме потужність перетворювача, що дуже збільшує їх вартість. Використання двозонного регулювання зв'язане, перш за все, з вимогою підвищення швидкості обробки виробів і тим самим підвищення продуктивності та, відповідно, прибутка. Систему двозонного регулювання можна розглядати не тільки в приводах постійного струму з двигунами незалежного збудження, але і в приводах змінного струму з асинхронними двигунами (АД) при векторному і скалярному управлінні, також режим двозонного регулювання може бути реалізований і в приводі з вентильним двигуном.
Мета роботи: вивчення та опис системи двозонного регулювання швидкості, дослідження динамічних властивостей різних варіантів схем регулювання.
Завдання: виконати порівняльний аналіз систем двозонного регулювання швидкості методом математичного моделювання, розробити рекомендації за їх застосуванням, побудувати спостерігач для виділення сигналу швидкості в двозонній системі.
Дослідженням цієї теми в ДонНТУ займалися: Толочко О.І., Коцегуб П.Х. [1-4].
Ця тема дуже поширена, тому її вивчала безліч авторів, як в Україні, так і за її межами. Серед них можна виділити: [5-13].
Основна частина
Скалярне керування. В деяких випадках діапазон регулювання можна розширити за рахунок підвищення частоти живлення. Якщо при цьому зберігати співвідношення U1/f1, то потужність двигуна зростатиме та, відповідно, зростатиме навантаження на перетворювач. Тому при управлінні в діапазоні частот вище номінального напругу статора підтримують постійною U1=const.
У режимі холостого ходу поток змінюється обратно пропорційно частоті (рис.1 а), а під навантаженням він зменшується тим повільніше, чим більше абсолютне ковзання.
Зміни потоку при збільшенні частоти викликані зменшенням струму статора, унаслідок зростання індуктивного опору розсіяння хσ1 , которое в этом режиме играет такую же роль, как активное сопротивление r1 при управлінні згідно із законом U1/f1=const.
При збільшенні частоти електромагнітний момент двигуна зменшується обратно пропорційно до квадрата α (рис.1 б), а потужність – обратно пропорційно до першого ступеня α, оскільки одночасно зростає швидкість обертання поля.
Поєднання двох режимів частотного управління U1/f1=const и U1=constдає можливість отримати двозонне регулювання швидкості АД. Особливість полягає лише в тому, що регулювання швидкості при частотному управлінні здійснюється зміною частоти в обох зонах, а режим управління потоком визначається законом управління напругою.
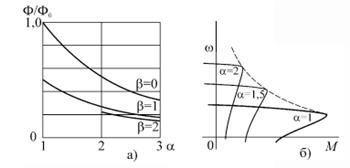 |
Рисунок 1 – Зміна магнітного потоку при різних навантажанях (а) та механічні характеристики (б) в області частот вище номінальної |
Векторне керування. Якщо потрібне двозонне регулювання швидкості, то в системі передбачається функціональний перетворювач (ФП). Вхідний сигнал на ньому визначається значенням швидкості. До тих пір, поки швидкість не перевищує номінальне значення, сигнал на виході ФП задає номінальний потік і залишається постійним. Коли швидкість перевищить номінальне значення, сигнал на виході ФП зменшуватиметься і швидкість, більша за номінальну, буде досягнута при ослабленні потокозчепления ротора і значенні напруги на статорі, близькому до постійного.
Розвиток векторних систем пішов по шляху переходу від безпосереднього вимірювання потоку до визначення його значення за допомогою математичної моделі електромагнітних процесів в асинхронному двигуні (моделі потоку). Розбіжності між реальними параметрами, що змінились, двигуна і незмінними параметрами моделі приводять до відхилення процесів в приводі від розрахункових, не дозволяючи повною мірою використовувати переваги векторного управління. Тому необхідне підстроювання моделі до нестабільних параметрів двигуна. Це одне з важливих завдань, що виникають при розробці системи.
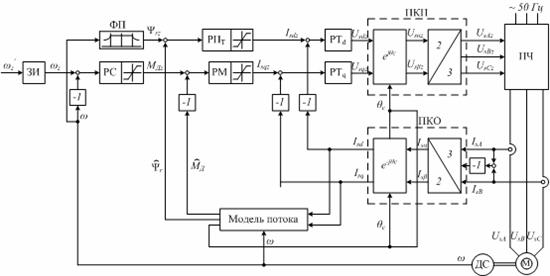 |
Рисунок 2 – Система векторного керування |
Вентильний двигун. При двозонному регулюванні, в діапазоні від нуля до номінальної швидкості підтримується рівність нулю складової струму статора по осі d і одночасно змінюються частота і напруга перетворювача частоти, а у верхній частині діапазону, коли напруга досягла номінального значення і подальше її збільшення неприпустимо, збільшується тільки частота, а струм по осі d рівним нулю не підтримується.
Оскільки потокозчеплення від потока ротора с постійними магнитами не може бути змінено, підтримка напруги постійною при збільшенні швидкості до значення, більшого номінального, можливо тільки шляхом створення складової струму Isd, відмінної від нуля. Вектор струму при цьому зрушується у бік випередження, і кут δ>90°. Для конкретного режиму значення Isd може бути знайдене в результаті вирішення нелінійного рівняння:
 |
Струм Isq визначається моментом навантаження, а ЕРС E – швидкістю ω>ωн. При цьому треба мати на увазі, що в сталому режимі повинна виконуватися умова Is≤Isн. Це накладає обмеження на значення тривало допустимого моменту.
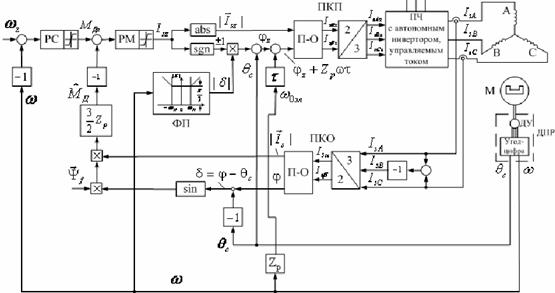 |
Рисунок 3 – Система з вентильним двигуном |
Двигун постійного струма (ДПС). Двозонне регулювання швидкості ДПС полягає в тому, що регулювання швидкості від нульового до номінального значення ωн (перша зона) здійснюється шляхом зміни напруги якоря Uя (від нульового до номінального значення) при постійному магнітному потоці двигуна рівному номінальному Φ=Φн. Регулювання швидкості від значення ωн до її максимального значення ωмах (друга зона регулювання) відбувається за рахунок ослаблення магнітного потоку двигуна при номінальній напрузі якоря Uя=Uян. Зміна потоку менш енергоємне, чим зміна Uя, оскільки потужність ланцюга збудження, в порівнянні з ланцюгом якоря, не велика.
Розглянемо детально систему двозонного регулювання ДПТ, оскільки вона буде реалізована в умовах лабораторії на базі приводу постійного струму Mentor II, контролера поля FXM5 і инкрементального датчика швидкості.
Залежно від вимог до характеристик електроприводу застосовують наступні варіанти структурних схем систем двозонного регулювання швидкості:
1) управління якірним колом та колом збудження, які працюють незалежно друг від друга (роздільне керування);
 |
Рисунок 4 - Роздільне керування, функціональна схема (анімація,5 кадрів, 5 повторів, 26,1 КВ) |
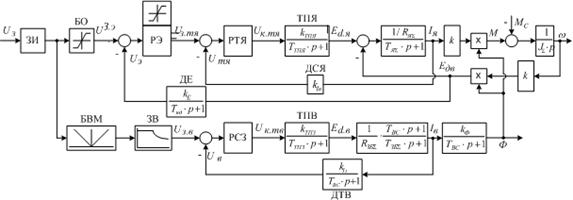 |
Рисунок 5 - Роздільне керування, структурна схема |
2) коли робота каналу збудження здійснюється залежно від якої-небудь величини, що змінюється, звичайно це ЕPС або напруга двигуна (залежне керування);
3) порівнюючи структурну схему цієї системи з двома описаними вище, можна сказати, що запропонована система є чимось середнім між ними. А саме: підсистема регулювання до основної швидкості така ж, як і у системи залежного керування, а підсистема регулювання збудження як у системи роздільного керування. Але в цьому варіанті, унаслідок того, що основний канал замкнутий за швидкістю, відпадає необхідність в розділовому підсилювачі. /p>
Розглянемо детальніше роздільне керування, оскільки цю тему буде досліджено найближчим часом (рис.4 и рис.5).
Системи двозонного регулювання з роздільним управлінням потоку збудження двигуна, перш за все, – це системи непрямого регулювання швидкості. Тобто, замість контура регулювання швидкості використовується або контур регулювання ЕРС (КРЕ) з регулятором ЕРС (РЕ) або контур регулювання напруги (КРН) з регулятором напруги (РН).
Перехід до зворотного зв'язку по ЕРС або напрузі в основному контурі виключає використання принципу залежного керування полем двигуна в звичайному варіанті, оскільки в зоні вище за основну швидкість сигнал зворотного зв'язку ніколи не зможе досягти сигналу завдання ЗІ. Тому і виникає необхідність в розділенні режимів керування напругою перетворювача і полем двигуна.
Перехід до роздільного керування полем двигуна ускладнює питання резервування і експлуатації схем, оскільки зміни стосуються не тільки основного каналу, але й каналу управління полем двигуна. Таким чином, виникає завдання створення додаткового вузла управління що дозволяє і при переході до регулювання напруги в основному контурі зберегти принцип залежного керування полем двигуна.
Один з варіантів реалізації таких систем запропоновано на рис.4 та рис.5.
У цій структурній схемі БО (блок обмеження) або РП – розділовий підсилювач, призначений для розділення зон регулювання. Його початкова напруга обмежена на рівні відповідному номінальною ЕРС (напруга) двигуна. Призначення РП полягає в обмеженні сигналу завдання що поступає з ЗІ, оскільки ЕРС і напруга, на відміну від швидкості, залишаються постійними при зміні потоку.
Перехід системи керування в другу зону здійснюється за допомогою задатчика збудження – ЗЗ при відповідному сигналі ЗІ. При початковому сигналі ЗІ відповідному сигналу завдання швидкості більше номінального ЗЗ знижує сигнал завдання на збудження.
При ω>0 працює тільки КРЕ при Φ=const, а при ω≤1 працює КРЗ при Eд=const.
Для цієї схеми основним є питання визначити аналітичний вираз характеристики ЗЗ, тобто визначити як повинна змінюватися вихідна напруга ЗЗ залежно від сигналу ЗІ.
Вид характеристики ЗЗ залежить від того, який з параметрів при розгоні ми хочемо підтримувати постійним Mj або Ij.
Виведемо характеристики ЗЗ для двох варіантів. При цьому не має значення, яким буде основний контур КРЕ або КРН. Вважатимемо, що основний контур замкнутий по ЕРС.
a) ЗЗ при Mj=const;
При роботі в першій зоні вихідний сигнал ЗЗ повинен бути постійним і відповідати номінальному потоку збудження. Все це можна записати у вигляді рівняння:
 |
б) ЗЗ при Ij=const;
Вихідна характеристика ЗЗ в першій зоні відома, – вона постійна і відповідає номінальному потоку збудження. Визначимо вихідну характеристику ЗЗ в другій зоні. Всі виводи, приведені вище, записані для ω>ω0,тобто для другої зони. У загальному вигляді (для обох зон регулювання) рівняння вихідної характеристики ЗЗ з Ij=const можна записати таким чином:
 |
Спостерігачь стану. У системах регулювання швидкості промислових механізмів як датчики швидкості застосовуються або тахогенератори, або імпульсні датчики швидкості, що мають недоліки. Використання систем непрямого регулювання швидкості з датчиками ЕРС або напруги в зовнішньому контурі приводить до погіршення динамічних властивостей приводу. Особливо великі проблеми виникають в системах двозонного регулювання, де за відсутності датчика швидкості доводиться застосовувати системи роздільного управління перетворювачами в якірному колі і в коліі збудження двигуна.
Буде розглянута можливість застосування в системах двозонного регулювання, як датчик швидкості, спостерігача стану (СС). Як вхідні сигнали для СС використовуємо сигнали, пропорційні напрузі якоря і потоку збудження двигуна.
При моделюванні необхідно отримати наступні графіки (рис.6).
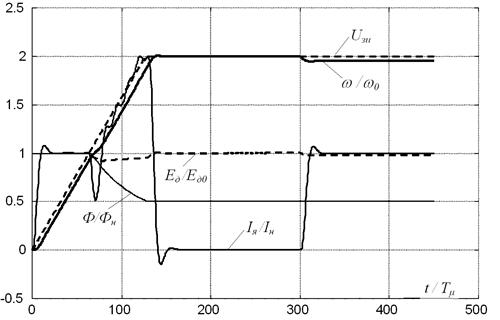 |
Рисунок 6 – Графикі при роздільном керуванні |
До моменту написання даного автореферату магістерська робота ще не закінчена. Остаточне завершення: січень 2010 р. Повний текст роботи і матеріали з теми можуть бути отримані в автора або його керівника після вказаної дати.
1. Толочко О.І. Системи непрямого регулювання швидкості зі спостерігачами стану /Толочко О.І., Песковатська О.В., Кудокоцев С.М.; Наукові праці ДонНТУ. Серiя “Електротехніка i енергетика”. – Донецьк: ДонНТУ. – 2003. – №67. – С. 168-173.
2. Толочко О.И. Сравнительный анализ систем двухзонного регулирования скорости /О.И. Толочко, П.А. Максаев; Проблемы создания новых машин и технологий. Научные труды КГПИ. – Кременчуг. – 1999. – №2 – С. 32-35.
3. Толочко О.И. Системы двухзонного регулирования скорости с наблюдателями состояния /Толочко О.И., Максаев П.А., Мариничев В.Ю.; Проблемы создания новых машин и технологий. Научные труды КГПИ. – Кременчуг: КГПИ. – 2000. – №1(8). – С. 53-56.
4. Толочко О.И. Системы двухзонного регулирования скорости /О.И. Толочко, П.А. Максаев/ Проблемы создания новых машин и технологий. Научные труды КГПИ. – Кременчуг: КГПИ. – 1998. – С. 28-31.
5. Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина». Иваново, 2008. 298с.
6. Усольцев А.А. Частотное управление асинхронными двигателями/Учебное пособие. СПб: СПбГУ ИТМО, 2006, – 94с.
7. Перельмутер В.М. Системы управления тиристорными электроприводами постоянного тока/В.М. Перельмутер, В.А Сидоренко - М.: Энергоиздат, 1988.
8. Чиликин М.Г. Общий курс электропривода/М.Г. Чиликин, А.С. Сандлер - М.: Энергоиз-дат, 1981 г.
9. Казачковський М.М. Комплектні електроприводи: Навч.посібник / Дніпропетровськ: Національний гірничий університет, 2003. - 226с.
10. Зимин Е.М. Электропривод постоянного тока с вентильными преобразователями - М: Энергоиздат, 1981, – 192с.
11. Walter N. Alerich Electricity 4: Ac/Dc Motors, Controls, and Maintenance. еdition:7, Cengage Learning, 2001, pp: 360
12. Dale R. Patrick Rotating electrical machines and power systems. edition:2, The Fairmont Press, Inc., 1997 pp: 399
13. Чалый В.В. Синтез Систем управления электромеханическими обьектами с применением интеллектуальных модулей на основе оборудования фирмы Control Technique [Электронный ресурс] / Портал магистров ДонНТУ – http://masters.donntu.ru/2008/eltf/chalyy/index.htm
14. Модель двигателя постоянного тока (регулирование скорости во второй зоне) [Электронный ресурс] / Официальный сайт компании MathWorks http://www.mathworks.com/matlabcentral/fileexchange/12137-pid-and-state-feedback-control-of-dc-motors