
Актуальность
В настоящее время имеется необходимость в обеспечении эксплуатационной надёжности электромеханического оборудования, в проверке и определении его состояния без осуществления демонтажа, в прогнозировании технического состояния и обеспечении безопасности функционирования.
Осуществление безразборной проверки основано на применении виброакустических методах диагностирования, тепловой диагностике, диагностике по электрическим величинам электропривода.
В данном направлении методы виброакустической диагностики достигли наибольшего развития.
Особенностью нашей работы является изучение взаимовлияния между электромеханическим преобразователем и приводимой нагрузкой, поиск возможности найти диагностические признаки среди электрических и механических величин (ток, напряжение, мощность, упругий момент, виброскорость и др.).
Отечественный и зарубежный опыт показывает, что использование средств диагностирования представляется экономически оправданным. Известно, что вовремя выполненные ремонтные работы уменьшают возможность производственных травм, количество внезапных отказов оборудования, что соответственно уменьшает время остановки производственных линий.
Цель работы
Построение лабораторного стенда имитации работы ШПУ на базе синхронного электропривода.
Источники [1,2,3,4] посвящены общим вопросам электропривода.
В материале [1,2,4] рассмотрены типичные электромеханические системы для ШПУ.
На основании рекомендаций, приведенных в источнике [3] (описание машин переменного тока), был произведен выбор двигателя для лабораторной установки.
В материале [8] даны описания наиболее распространенных дефектов оборудования – приведены спектрограммы вибропараметров, наблюдающиеся при тех или иных неисправностях, описаны их отличительные особенности.
В [9] автором рассмотрены вопросы улучшения и оптимизации технического состояния оборудования размольного отделения мельницы путём разработки и внедрения методов и средств функциональной вибродиагностики. Проведены теоретические и экспериментальные исследования. Даны ссылки на условия проведения поставленных экспериментов. Рассмотрены частотные математические модели следующих дефектов: «неуравновешенность ротора энтолейтора», дефект вальцевого станка «недостаточное усилие предохранительной пружины» и др. Приведены статистические данные влияния способа установки вибродатчика на значения различных параметров вибрации.
Наблюдаемый объект может находиться в одном из следующих состояний [7]:
- неповрежденный, т.е. состояние, когда наблюдаемый объект отвечает всем требованиям определенным нормативно-технической документацией;
- работоспособность, т.е. состояние, когда объект способен выполнять заданные функции в пределах, которые определены нормативно-технической документацией;
- правильность функционирования, т.е. состояние, когда объект выполняет в текущий момент времени предписанные алгоритмы функционирования (известно только, что объект правильно функционирует в заданном режиме работы в данный момент времени);
- аварийная ситуация объекта, когда его последующее функционирование не возможно в результате ухода его параметров за допустимые пределы.
Среди диагностируемых неисправностей различают следующие [8]:
- "электромагнитные" неисправности:
- ослабление прессовки пакета стали;
- обрыв или короткое замыкание в обмотках;
- эксцентриситет, эллипсоидность внутренней расточки статора относительно оси вращения статора;
- неправильный взаимный монтаж пакетов статора и ротора;
- эксцентриситет внешней поверхности ротора относительно его оси вращения;
- обрыв или потеря контакта в стержнях обмотки или короткозамыкающих кольцах ротора с беличьей клеткой асинхронного электродвигателя;
- ослабление прессовки всего пакета стали или только в районе зубцов;
- дисбаланс масс ротора;
- расцентровка валов;
- механическое ослабление;
- задевание элементов;
- проблемы подшипников скольжения;
- проблемы подшипников качения;
- дефекты редукторов и мультипликаторов;
- дефекты муфт.
Синтез системы векторного управления синхронным двигателем при
поддержании тока id=0
Как вытекает из математической модели синхронного двигателя в системе координат d,q ротора (соответствующая структурная схема показана на рис. 1), одним из эффективных способов глубокого регулирования скорости является возможность поддержания системой регулирования значения тока id=0 , тогда электромагнитный момент синхронного двигателя будет зависеть только от тока статора по оси iq и потокосцепления ψd . В результате экспериментов на математической модели установлено, что потокосцепление ψq практически не изменяется во всех режимах работы привода: в установившемся и переходных (разгон, торможение, наброс и сброс нагрузки) оно близко к нулю. То есть можно принять допущение, что ψq = const ≈0. Потокосцепления ψd не равно нулю, она также слабо изменяется, т.е. ψd = const ≠ 0. Таким образом, контуры регулирования замыкаются только по токам, значения которых непосредственно измеряются. Величины потокосцеплений используются для компенсации перекрестных связей, они могут быть оценены с помощью самонастраивающихся математических моделей или же измерены непосредственно.
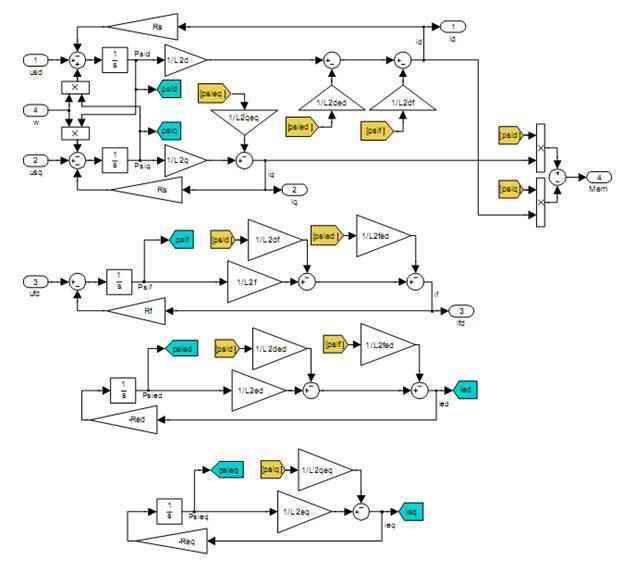
Рисунок 1 – Применяемая структурная схема синхронного двигателя
Ниже приведен синтез регуляторов системы подчиненного регулирования скорости.
Синтез регуляторов тока
Контур регулирования тока id синтезируем в предположении, что перекрестные связи в объекте регулирования соответствующим образом скомпенсированы. Структурная схема контура регулирования тока (КРТ) приведена на рис. 2:
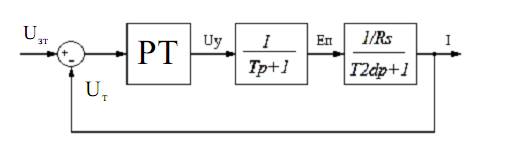
Рисунок 2– Структурная схема контура регулирования тока id
Контур регулирования тока, содержит одну большую T2d=x2d/Rs и одну малую T постоянную времени. Будем считать, что T = Tµ - малая некомпенсированная постоянная времени.
Статическая ошибка по управляющему воздействию как реакция на скачок системы с астатизмом первого порядка равна нулю. Чтобы система стала астатической первого порядка, выберем регулятор тока пропорционально-интегрального типа (ПИ), компенсируя большую постоянную времени T2d . Передаточная функция выбранного ПИ регулятора тока:
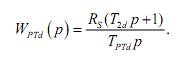
Настраивая систему на технический оптимум, принимаем постоянную времени регулятора тока, равной TPTd=2Tµ. Аналогичным образом производится синтез регуляторов токов iq и if. Их передаточные функции будут иметь следующий вид:
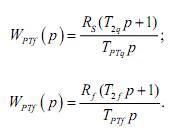
Настройка регуляторов токов iq и if на технический оптимум: TPTd=2Tµ, TPTf=2Tµ.
Синтез регулятора скорости
Расчетная структурная схема контура регулирования скорости приведена на рис. 3, ниже.
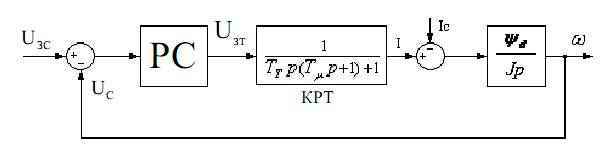
Рисунок 3 – Структурная схема контура регулирования скорости
Для обеспечения астатизма системы управления по управляющему воздействию и по нагрузке, принимаем однократно интегрирующую систему подчиненного регулирования скорости, для этого выбираем регулятор скорости типа ПИ, передаточная функция которого
получена в предположении, что в установившемся режиме значение потокосцепления ψd=const . Настраивая регулятор скорости на симметричный оптимум, принимаем значения коэффициентов: a=8 , TШ = 4Tµ.
Моделирование задатчика интенсивности
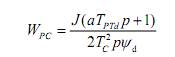
Задатчик интенсивности (ЗИ) необходим для формирования желаемого закона изменения регулируемой величины, а в частности – скорости. В рассматриваемом случае задатчик должен, кроме обеспечения заданного темпа изменения скорости, иметь возможность ограничивать величину рывка. Структурная схема ЗИ с ограничением рывка приведена на рис. 4.
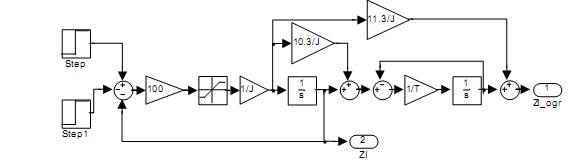
Рисунок 4 – Структурная схема задатчика интенсивности с ограничением рывка
Структурна схема системы ПЧ-СД с поддержанием id= 0 приведена на рис. 5.Графики переходных процессов рис. 6 – 15 отображают изменение во времени основных величин при работе рассмотренной системы управления синхронным двигателем. Рассмотрена отработка трапецеидальной тахограммы движения с последующим переходом на пониженную скорость. Наброс нагрузки на установившейся частоте вращения произведен для оценки качества переходных процессов при отработке системой управления токого вида воздействия. Из рис. 6 видно, что система является астатической по нагрузке. Также, система управления астатична по управляющему воздействию нулевого порядка, ошибка отработки задания в этом случае равна нулю и установившееся значение частоты вращения равно заданному. Кроме того, она устойчива, так как во всех рассмотренных режимах работы (разгон, торможение, наброс нагрузки) не наблюдается возникновения автоколебаний. Как ранее, априори, предполагалось, потокосцепление Ψq ≈0 в течение всего цикла работы (рис. 11), а величина потокосцепления Ψd в установившихся режимах держится на постоянном уровне, в переходных режимах существенно не меняется.
Рисунок 5 – Структурна схема системы ПЧ-СД с поддержанием id=0
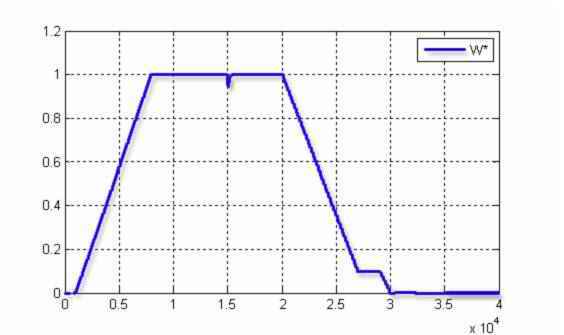
Рисунок 6 – График зависимости частоты вращения от времени ω*(t) при отработке
системой ПЧ-СД трапецеидальной тахограммы движения с поддержанием id=0
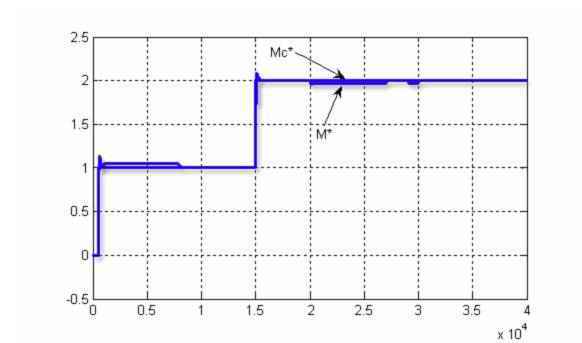
Рисунок 7 – График зависимости электромагнитного момента от времени M*(t) при
отработке системой ПЧ-СД трапецеидальной тахограммы движения с поддержанием id=0
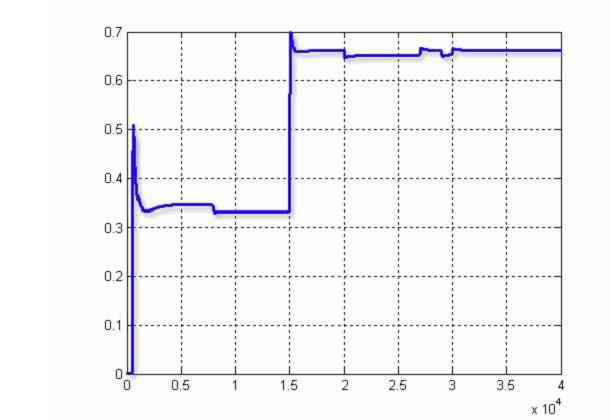
Рисунок 8 – График зависимости тока статора от времени is*(t) при отработке системой ПЧ-СД трапецеидальной тахограммы движения с поддержанием id=0
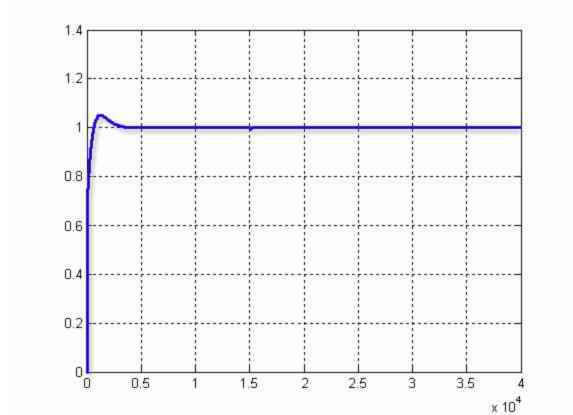
Рисунок 9 – График зависимости тока возбуждения от времени if*(t) при отработке системой ПЧ-СД трапецеидальной тахограммы движения с поддержанием id=0
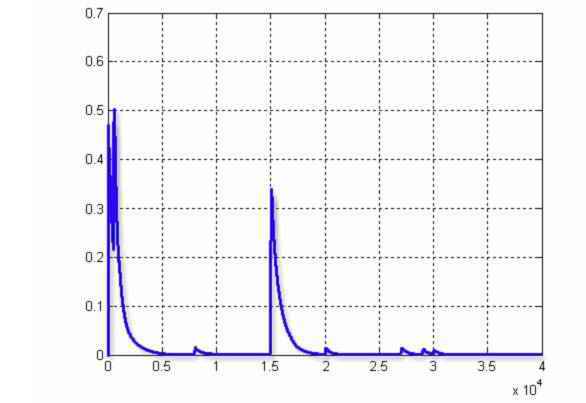
Рисунок 10 – График зависимости тока демпферной обмотки от времени ie*(t) при отработке системой ПЧ-СД трапецеидальной тахограммы движения с поддержанием id=0
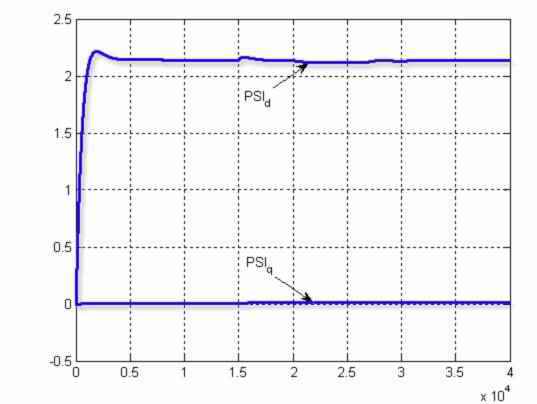
Рисунок 11 – График зависимости потокосцепления статора от времени Ψs*(t) при отработке системой ПЧ-СД трапецеидальной тахограммы движения с поддержанием id=0
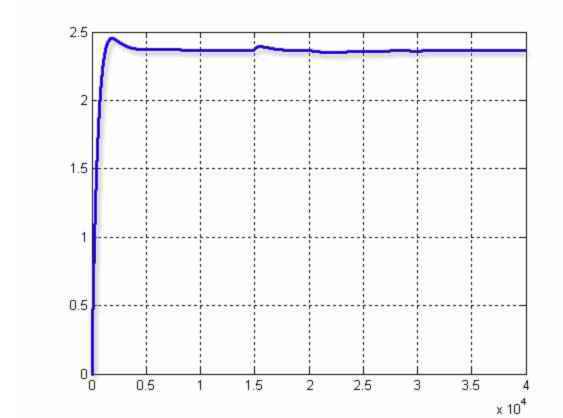
Рисунок 12 – График зависимости потокосцепления обмотки возбуждения Ψf*(t) при отработке системой ПЧ-СД трапецеидальной тахограммы движения с поддержанием id=0
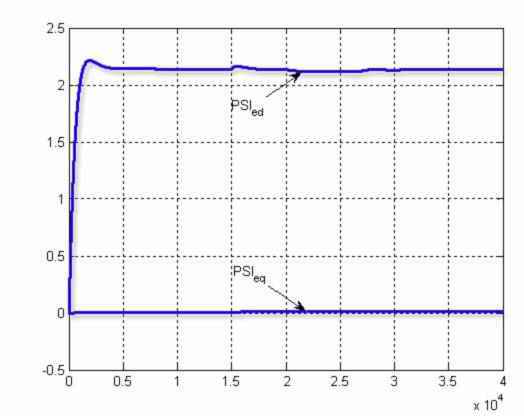
Рисунок 13 – График зависимости потокосцепления демпферной обмотки Ψe*(t) при отработке системой ПЧ-СД трапецеидальной тахограммы движения с поддержанием id=0
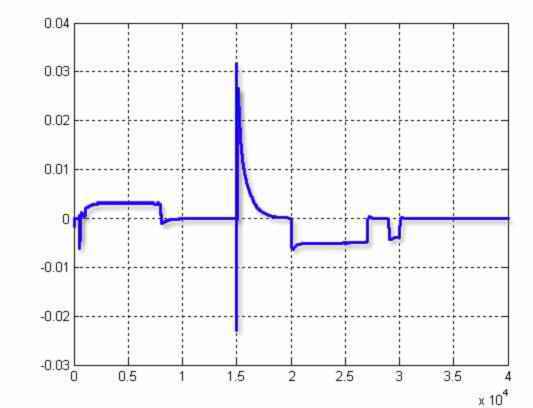
Рисунок 14 – График зависимости тока статора от времени id*(t) при отработке системой ПЧ-СД трапецеидальной тахограммы движения с поддержанием id=0
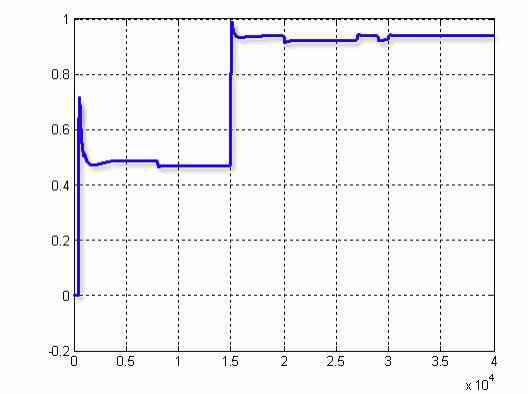
Рисунок 15 – График зависимости тока статора от времени iq*(t) при отработке системой ПЧ-СД трапецеидальной тахограммы движения с поддержанием id=0
Прямое управление моментом (DTC)
Прямое управление моментом состоит в том, чтобы регулировать амплитуду и фазу вектора, представляющего потоки статора. Работают, чтобы осуществить это в отправных координатах Парка, связанных с обмотками статора, т.е. репер dq (координаты d-q) определяется ξs=0 , который совпадает с репером αβ статора. Итак, чтобы соответствовать
![]()
должно быть равенство
![]()
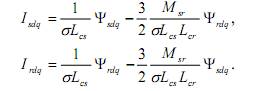
Из выражений
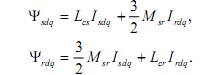
можно выразить Isdq и Irdq
Подставляя два последних выражения в уравнение электромагнитного момента
![]()
можно выразить момент через потоки статора и ротора

где ρs и ρr – соответственно углы между векторами Ψsdq и Ψrdq и заданной осью статора, рис.16.
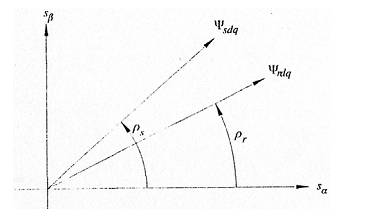
Рисунок 16 – Статорные и роторные потоки
Постоянная времени ротора Tr, определяющая изменение роторных потоков, во много раз превышает последнюю σLcs/Rs для статорных потоков.
Используя уравнение электрического равновесия для статора Usdq и выражение для I sdq, можно показать уравнение трансформации статорных потоков:

Итак, можно рассматривать касательно масштаба времени управления, что роторный поток есть практически постоянным по направлению и амплитуде и что момент может регулироваться воздействием на поток статора.
Прямое
управление моментом заключается в том, чтобы поддержать уровень (норму)
статорного потока квазипостоянным и его удерживать в пределах между ![]() и
и ![]() ; регулировать момент, воздействием на угол
ρs , в сторону его
повышения, если разность
; регулировать момент, воздействием на угол
ρs , в сторону его
повышения, если разность ![]() уменьшается и, наоборот, понижать его
(момент) в случае увеличения
уменьшается и, наоборот, понижать его
(момент) в случае увеличения ![]() .
.
Соответствующие сигналы управления генерируются от гистерезисных компараторов.
Регулирование напряжений, которые будут приложены к машине, может осуществляться, рассматривая, что инвертор напряжения может поддержать в плане sα , sβ только семь векторов различных напряжений в функции конфигурации рерывателей силовойэлектроники, что его составляют, рис. 17-18.
Рисунок 17 – Положение ключей для обеспечения заданных уровней напряжений
(Анимация, 8 кадров, 5 повторов, размер 12,1 кВ)
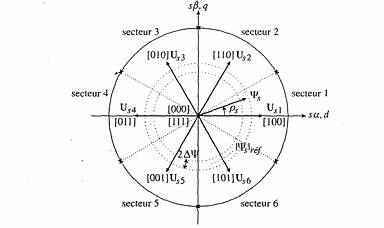
Рисунок 18 – Напряжения на инверторе напряжения
Различают ещё шесть секторов. Если, как на примере, представленном на рис. 18, вектор Ψsdq располагается в секторе 1, и сигналы управления индицируют, что его фаза ρs должна возрастать (чтобы увеличивать величину момента), будет приложено, допустим, напряжение Us2 или Us3 согласно тому, что требуется по случаю, - увеличить или уменьшить величину амплитуды Ψ sdq.
Простым способом, если желают увеличить фазу ρs , приложат взаимно Us6 или Us5 согласно тому, что амплитуда Ψ sdq должна будет возрастать или снижется.
Таблица 1 даёт в функции выходных сигналов управления гистерезисных компараторов и сектора, где находится Ψ sdq, различные векторы напряжений, которые будут приложены (к двигателю).
Таблица 1 – Напряжения, прикладываемые к зажимам двигателя

Оценка
величины Ψ sdq может реализовываться простым интегрированием
прикладываемых к двигателю напряжений с учётом омических падений напряжения: 
Последнее
возможно потому, что реперы αβ статора и dq ротора
совпадают при ![]()
Зная амплитуду и фазу Ψ sdq можно легко определить момент, развиваемый машиной. Выражая I rdq в функции Ψ sdq и I sdq и учитывая выражение для момента , покажем, что
![]()
Прямое управление моментом представляет преимущество, которое позволяет получить повышенные динамические характеристики без необходимости, в противоположность векторному управлению, усложнённых расчётов мощности, измерению или точной оценке частоты вращения ротора. Из оценки статорного потока путём интегрирования суммарных величин, следует, что регулирование, всякий раз, очень чувствительно к ошибкам измерений. Кроме того, управление, реализуемое от гистерезисных компараторов, ведёт к работе с переменной частотой инвертора напряжения, который питает двигатель.
Ортогональные вейвлеты и многомасштабный анализ
Вейвлет-преобразование естественно возникает в контексте многомасштабного анализа (multiresolution analysis), МА. МА – это математическая конструкция, синтезирующая две идеи обработки сигналов. Первая идея – разложение сигнала по поддиапазонам (subband decomposition) при помощи квадратурных зеркальных фильтров (quadrature mirror filters) – появилась в задаче сжатия речи. Вторая идея – пирамидное представление (pyramid representation) – в задаче сжатия изображений. Обе идеи связаны с применением к сигналу фильтров специального вида. В первом случае теория строилась в терминах Фурье-преобразования сигнала, во втором – в терминах исходного сигнала.
Рассмотрим
сигнал – последовательность чисел x=![]() . Для сглаживания сигнала, подавления шума и
других целей часто используют фильтры – преобразования свертки вида:
. Для сглаживания сигнала, подавления шума и
других целей часто используют фильтры – преобразования свертки вида:
![]() .
.
Сигнал y=![]() получается “локальным усреднением”
сигнала x с помощью набора “весов”
получается “локальным усреднением”
сигнала x с помощью набора “весов” ![]() :
:
В дальнейшем нам понадобятся следующие понятия.
- Дискретное преобразование Фурье (ДПФ) сигнала:
 (формальная сумма).
(формальная сумма). - z-преобразование сигнала:
 (формальная сумма).
(формальная сумма).
- Преобразование Фурье функции
 имеет вид
имеет вид  .
.
В этих терминах применение фильтра записывается так:
![]() ,(1.1)
,(1.1)
или
![]() (1.1')
(1.1')
(если сигнал конечен, его обычно доопределяют
периодическим образом для всех целых значений индекса).
- Транспонированный фильтр
 состоит из тех же коэффициентов, что
и фильтр
состоит из тех же коэффициентов, что
и фильтр  ,
переставленных в обратном порядке. В Фурье-области транспонированный
фильтр имеет вид
,
переставленных в обратном порядке. В Фурье-области транспонированный
фильтр имеет вид  . Коэффициенты всех сигналов и фильтров
будут предполагаться вещественными.
. Коэффициенты всех сигналов и фильтров
будут предполагаться вещественными.
Разложение по диапазонам
![]()
![]()
![]() характеризует распределение
“энергии” сигнала по частотам
характеризует распределение
“энергии” сигнала по частотам ![]() . Иногда бывает полезно разложить сигнал на
компоненты, энергия которых сосредоточена в различных частотных поддиапазонах
(т.е. существенно отлична от нуля на различных подотрезках отрезка
. Иногда бывает полезно разложить сигнал на
компоненты, энергия которых сосредоточена в различных частотных поддиапазонах
(т.е. существенно отлична от нуля на различных подотрезках отрезка ![]() ), и кодировать их с разной
степенью детальности (например, в зависимости от чувствительности человеческого
уха к звукам различной частоты). Задолго до создания вейвлет-анализа для этого
использовалась схема, которую мы сейчас опишем.
), и кодировать их с разной
степенью детальности (например, в зависимости от чувствительности человеческого
уха к звукам различной частоты). Задолго до создания вейвлет-анализа для этого
использовалась схема, которую мы сейчас опишем.
Мы хотим
найти два фильтра, h (подавляющий высокие частоты) и g (подавляющий низкие
частоты), которые позволяли бы разложить сигнал на две компоненты, ![]() и
и ![]() , вдвое их проредить (половина
значений становится лишней – ведь частотный диапазон сократился вдвое!), а
затем, с помощью транспонированных фильтров, точно восстановить по этим данным
исходный сигнал (эту операцию можно применять рекурсивно). Условия на искомые
фильтры удобно записать в терминах z-преобразования.
, вдвое их проредить (половина
значений становится лишней – ведь частотный диапазон сократился вдвое!), а
затем, с помощью транспонированных фильтров, точно восстановить по этим данным
исходный сигнал (эту операцию можно применять рекурсивно). Условия на искомые
фильтры удобно записать в терминах z-преобразования.
Пусть ![]() – z-преобразование одной из
компонент. Перед кодированием она прореживается вдвое, а перед восстановлением
исходного сигнала доводится до исходной длины вставкой нулей между соседними значениями.
При этом z-преобразование из
– z-преобразование одной из
компонент. Перед кодированием она прореживается вдвое, а перед восстановлением
исходного сигнала доводится до исходной длины вставкой нулей между соседними значениями.
При этом z-преобразование из ![]() превращается в
превращается в ![]() . Подставим сюда (1.1’) для каждого из фильтров, и получим z-преобразования компонент перед восстановлением
. Подставим сюда (1.1’) для каждого из фильтров, и получим z-преобразования компонент перед восстановлением
![]()
z-преобразования транспонированных фильтров имеют
вид ![]() и
и ![]() . Сигнал восстановится с их
помощью точно, если:
. Сигнал восстановится с их
помощью точно, если:
![]() .
.
Получаем условия точного восстановления (perfect reconstruction, PR):
![]()
В матричной форме они записываются так: ![]()
![]() ,
,
где
![]()
Подставив ![]() , получим условия на ДПФ искомых фильтров:
, получим условия на ДПФ искомых фильтров:
 (1.2)
(1.2) 
Допустим, что мы нашли h такой, что
![]() (1.2’)
(1.2’)
Тогда, положив
![]() , (1.3)
, (1.3)
мы видим, что (1.2)
выполняется. Задача свелась к нахождению тригонометрического многочлена ![]() , удовлетворяющего (1.2’). На методах построения таких многочленов мы остановимся в следующей лекции. Фильтры h и g,
удовлетворяющие (1.2), называются квадратурными зеркальными фильтрами
(quadrature mirror filters, QMF).
, удовлетворяющего (1.2’). На методах построения таких многочленов мы остановимся в следующей лекции. Фильтры h и g,
удовлетворяющие (1.2), называются квадратурными зеркальными фильтрами
(quadrature mirror filters, QMF).
На рис.17, (a) и (b), показаны ДПФ такой пары фильтров h и g, а также исходный сигнал до и после фильтрации (без прореживания).
Рисунок 17a.
Рисунок 17b.
Точно такую же операцию можно применить к одной или обеим из полученных компонент, и т.д., добиваясь нужной локализации по частоте. Это позволяет адаптироваться к особенностям сигнала за счет выбора подходящего “дерева разложения”. Оно может выглядеть, например, так:
Рисунок 18 - “Дерево разложения”
Список использованной литературы
1. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981. - 576 с.
2. Ключев В.И. Теория электропривода. - М.: Энергоатомиздат,1985-560с.
3. Костенко М.П., Пиотровский Л.М. Электрические машины. В 2-х ч. Ч.2. – Машины переменного тока. Ученик для студентов высш. техн. учеб. заведений. Изд. 3-е, перераб. Л., «Энергия», 1973., 648с.
4. Башарин А. В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-ние, 1982. – 392с., ил.
5. Моделювання електромеханічних систем: Підручник / Чорний О.П., Луговой А.В., Родькін Д.Й., Сисюк Г.Ю., Садовой О.В. – Кременчук, 2001. – 376с.
6. Daubechies I. Ten Lectures on Wavelets. SIAM, 1992.
7. "Виброакустическая диагностика зарождающихся дефектов"/Балицкий Ф.Я., Иванова М.А., Соколова А.Г., Хомяков Е.И.. М.: Наука, 1984
8. Русов В.А. "Спектральная вибродиагностика" 1996 г. http://www.vibrocenter.ru/book.htm
9. Яблоков А.Е. Автореферат на соискание учёной степени кандидата технических наук. «Вибродиагностика основного технологического оборудования размольного отделения мельницы». М.: Издательский комплекс МГУПП, 2001 г.
10. Трибология. Физические основы, механика и технические приложения. Учебник для вузов/ Беркович И.И., Громаковский Д.Г.; Под ред. Громаковского Д.Г.; Самар. гос. техн. ун-т. Самара, 2000. 268 с.
При написании данного автореферата магистрская работа не завершена. Окончательный вариант работы можно получить у автора или научного руководителя после декабря 2010 года.
ДонНТУ > Портал магистров ДонНТУ || Об авторе | Библиотека | Ссылки | Отчет о поиске | | Рок-группа RADIOHEAD