| RUS | UKR | ENG | ДонНТУ | Портал магістрів ДонНТУ |
 |
Фоменко Артем ВолодимировичФакультет інженерної механіки та машинобудування
|
| Про себе |
| Реферат за темою випускної роботи |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Вступ Головну роль у розвитку промисловості України грає паливно-енергетичний комплекс. Функціонування і розвиток паливно-енергетичного комплексу України значною мірою зумовлюються станом і розвитком вугільної промисловості, яка широко поширена в нашому регіоні.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
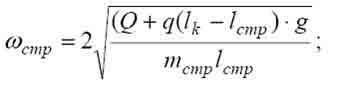
 (3)
(3)  (4)
(4)  (5)
(5)  (6)
(6)  (7)
(7)  (8)
(8)  (9)
(9) 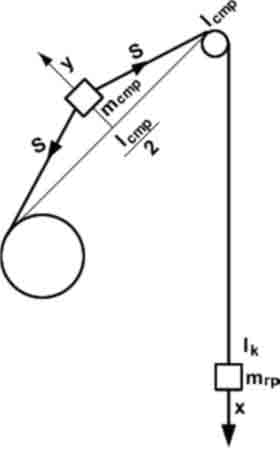
 (10)
(10)  (11)
(11)  (12)
(12)  (13)
(13)  (14)
(14) 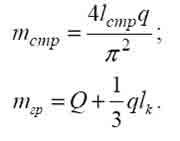 (15)
(15)  (16)
(16)  (17)
(17)  (18)
(18)  (19)
(19)  (20)
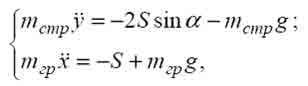
(20) 
 (21)
(21)  [8]
[8] 

| Напруга живлення (частотою 50Гц), В |
|
|
ДКПУ-12 |
660/380/127
|
|
ДКПУ-22 |
380/220/127 |
|
Споживана потужність, В • А, не більше |
20 |
|
Робочий зазор між первинним перетворювачем
і об'єктом контролю, мм, не більше |
160 |
|
Час спрацювання датчика,
с, не більше |
0,1 |
|
Кількість контактів вихідних реле |
2р, 2З |
|
Маса, кг, не більше |
|
|
Блоку БІ-1 |
33 |
|
Блоку БІ-2 |
3,7 |
|
Перетворювачі ПП-2 |
1,6 |
|
Магніта МПП |
1,6 |
|
Габаритні розміри, мм |
|
|
Блоку БІ-1 |
420х380х350 |
|
Блоку БІ-2 |
145х215х175 |
|
Перетворювачі ПП-2 |
220х160х75 |
|
Магніта МПП |
230х60х75 |
|
ТУ 12.48.190-85 |
|
Для керування пристроями пропоную застосувати комплектний регульований електропривод постійного струму з мікропроцесорним управлінням серії РЕП2-ШПМ.
Комплектне пристрій призначений для керування електродвигуном постійного струму шахтних підйомних машин та інших механізмів, що вимагають регулювання швидкості в широких межах.
Призначення комплектного приводу - для нових електроприводів ШПМ і модернізації діючих ШПМ.
РЕП2-ШПМ є новим поколінням спеціалізованих регульованих електроприводів постійного струму, призначених для ШПМ.
Відмінні особливості:
• нові схемотехнічні та конструктивні рішення щодо силової частини якірного перетворювача та збудника, що дозволили їх істотно спростити, зменшити в габаритах, за вагою, при одночасному підвищенні надійності (при збереженні резервування та інших "напрацьованих" позитивних рішень серії УКТЕШ);
• нові уніфіковані мікропроцесорні системи управління перетворювачем, збудником і приводом, в цілому (з урахуванням технології). Слід зазначити, що останнє рішення є уніфікованим для електроприводів ШПМ будь-яких типів-постійного і змінного струмів.
Привід шахтної підйомної машини РЕП2-ШПМ забезпечує наступні характеристики:
• розгін, гальмування і реверсування підйомного електродвигуна (тривалість розгону, гальмування до 30 с);
• обертання електродвигуна з усталеною швидкістю обертання, її підтримку і регулювання в діапазоні 75:1;
• статична точність підтримки швидкості при застосуванні прецезіонного тахогенератора і зміну моменту навантаження від нуля до номінального до 1% на максимальній швидкості і до 5% - на мінімальній;
• формування робочої діаграми швидкості як трикутного, так і трапецеідального типу з заданим прискоренням (уповільненням) і обмеженням ривка;
• обмеження швидкості наростання і спадання струму електродвигуна;
• безступінчасте завдання швидкості при ручному управлінні;
• допустимі перевантаження по струму в залежності від їх тривалості та відповідно до технічних умов на двигуни та тиристорні агрегати;
• види управління - ревізія, ручне, автоматичне (для клітьових ШПМ - ліфтовий режим управління із здійсненням маневрових операцій на горизонтах, для скіпових = за сигналами розвантаження-завантаження судин з можливістю відпрацювання режиму постановки ШПМ на відбій);
• облік характеру вантажу ("вантаж", "люди", "обладнання", "ревізія") за інформацією з пульта;
• автоматичне регульоване запобіжний гальмування при наявності дискового гальма; діапазон регульованого уповільнення запобіжного гальмування 0,75 - 5,0 м/с2 при точності відпрацювання 25%;
• захисту, передбачені правилами безпеки на шахтах і рудниках;
• блокування, що забороняють неправильні дії з управління машиною;
• аварійну, заборонену, оперативну, попереджувальну сигналізації.
Технічні характеристики електроприводу
|
Найменування параметра |
Pазмерность |
Величина |
|
Напруга живильної |
кВ |
6 або 10 |
|
Номінальний випрямлений
струм |
А |
1600, 2500, 3200, |
|
Номінальна випрямлена |
В |
440, 600, 750, 930 |
|
Напруга трифазної мережі |
В |
380 |
|
Напруга тиристорного |
В |
440 |
|
Номінальний струм збудника |
А |
100, 200, 320, 500 |
|
Діапазон регулювання |
|
75:1 |
|
Точність підтримки |
% |
1,0 |
За способом реверсування електродвигуна електроприводи виготовляються у двох виконаннях: з реверсуванням струму в ланцюзі якоря і реверсуванням струму в ланцюзі збудження.
За кількістю двигунів: однодвигунові і дводвигунових.
У комплект електроприводів входять:
1. Цифровий електропривод.
2. Шафа випрямляча Ш.
3. Шафа управління аппартури технологічної автоматики, захисту та сигналізації.
4. Щит управління допоміжними приводами.
5. Шафа управління гальмом, датчика стопоріння та захисту від перепід'йома.
Силова частина РЕП2-ШПМ конструктивно являє собою щит, що складається з шаф підлогового виконання двостороннього обслуговування. Електропривод шахтного підйому РЕП2-ШПМ може бути укомплектований сухими або масляними трансформаторами виробництва ВАТ "Укрелектроапарат" (м. Хмельницький, Україна), ВАТ "Запоріжтрансформатор" (м. Запоріжжя, Україна) або їх аналогами.
Обладнання РЕП2-ШПМ встановлене на шахті "Нова" м. Жовті води потужністю 3750 кВт (5000 А, 750 В)

Рисунок 7 - Зліва направо - шафа системи керування приводом, шафа вводу 1-а секція, шафа силовий, шафа введення 2.-я секція, збудник.

Малюнок 8 - На передньому плані дві шафи-2-я секція введення і збудник [10]
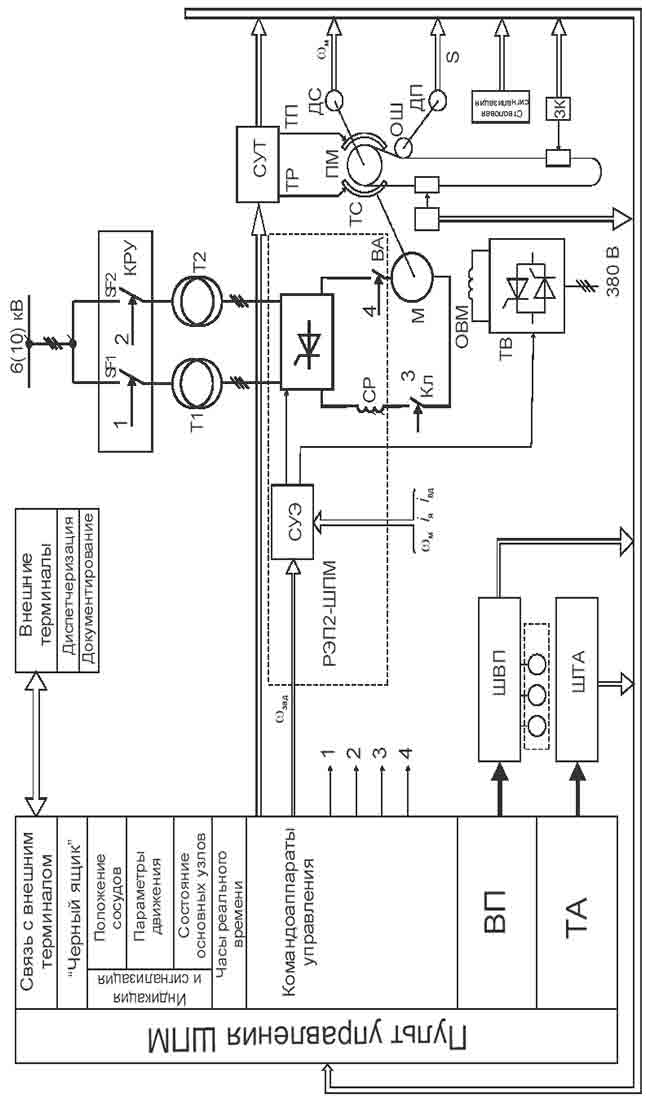
Рисунок 9 - Структурна схема РЕП2-ШПМ [1]
Рисунок 10 - Схема перемикання пристроїв
(анімамація, об'єм - 62,5 Кб, складається з 8 кадрів,
9 повторень, зроблена в Adobe ImageReady)
Література
1. Электроприводы для шахтных подъемных машин мощностью от 630 до 6300 кВт\Укрэлектросервис\Харьков, Украина[Электронный ресурс]/ http://rotor.in.ua/mkeelektropriv3.php.
2. Шахтный подъем: Научно-производственное издание \ Бежок В.Р., Дворников В.И., Манец И.Г., Пристром В.А.; общ.ред. Б.А. Грядущий, В.А. Корсун.-Донецк: ООО "Юго-Восток,Лтд",2007.-624 с., 494 ил., 233 библиогр.
3. Еланчик Г.М., Проходцева Е. А. Шахтные стационарные установки. МИРГЭМ, 1964.
4. Флоринский Ф.В. Динамика шахтного подъемного каната. Под ред. Савина Г.Н. М.: Углетехиздат, 1958 г. 239 с.
5. Завозин Л. Ф. Шахтные подъемные установки. Изд. 2-е переработ. И доп. М., "Недра", 1975, 368 с.
6. Калиш С.И., Чебаненко К.И. Справочник машиниста шахтной подъемной машины. - М.: Государственное научно-техническое издательство литературы по горному делу, 1962.
7. Динамические режимы рудничного подъема \ В.Е. Католиков, А.Д. Динкель . - М. : Недра, 1995 . - 448с.
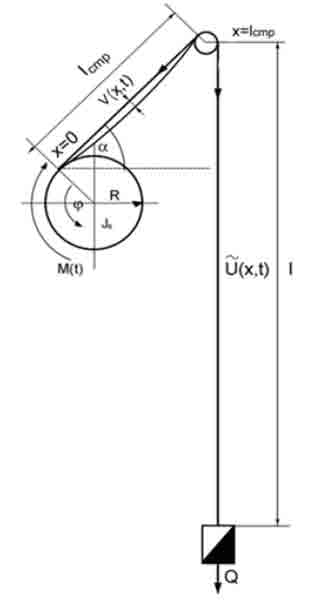
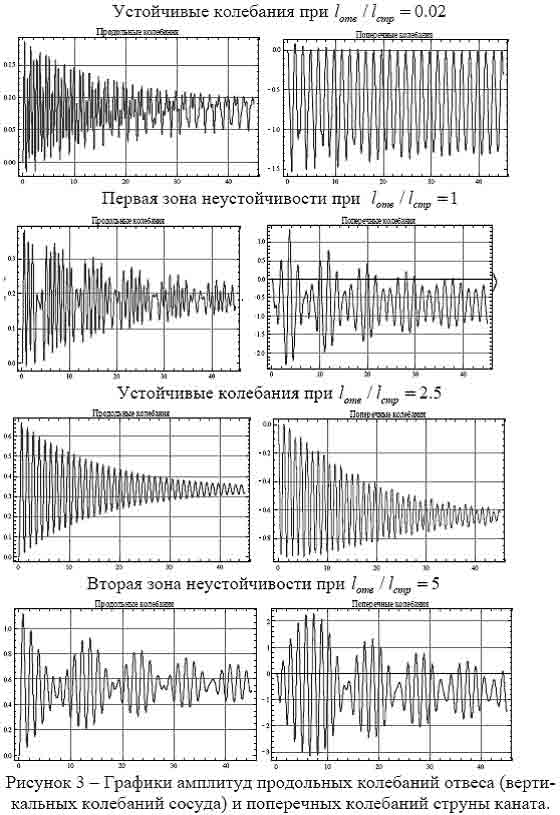
8. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ НЕЛИНЕЙНЫХ КОЛЕБАНИЙ СТРУНЫ И ОТВЕСА КАНАТА МОБИЛЬНОЙ ПОДЪЕМНОЙ УСТАНОВКИ
Ильин С.Р., канд. техн. наук, с.н.с.,
Самуся С.В., аспирант, Институт геотехнической механики
им Н.С.Полякова НАН Украины[Электронный ресурс] \ www.nbuv.gov.ua/portal/natural/Npdntu/Gir/2008_16_142/St17.pdf
9. MKE - Электроприводы и преобразователи частоты[Электронный ресурс] / http://www.mke.com.ua/?p=29&till=&secure=&lang=.
10. Делком Украина — Датчики контроля положения унифицированные ДКПУ ⁄ Каталог продукции ⁄ Продукция [Электронный ресурс] \ http://delcom.com.ua/production/catalogue/dkpu/.
11. В.Н. Потураев, А.Г. Червоненко, Л.В. Колосов и др. Вертикальный транспорт на горных
предприятиях // М.: Недра, 1975. - 351с.
| ДонНТУ | Портал магістрів ДонНТУ | Про себе |